基于车辆感知和模糊PID的隧道照明控制系统*
2021-03-05杜冠峰秦会斌
杜冠峰,秦会斌
(杭州电子科技大学 新型电子器件与应用研究所,浙江 杭州 310018)
0 引 言
随着我国交通系统的快速发展,隧道的数量也成比例的增长。隧道照明作为公路隧道的重要组成部分,为隧道通行提供安全保障。但由于隧道照明系统的不合理设计使得高速公路隧道存在严重的过度照明现象,增加了隧道的运营成本[1]。同时由于驾驶员驶入隧道和驶出隧道时,隧道内外的亮度差过大时会造成“黑洞效应”和“白洞效应”[2],降低驾驶员的可见度,造成交通事故,如何同时保证驾驶员的安全和隧道照明的运营成本成为了公路交通的一个重要研究方向。
为减少隧道照明的电能损耗,张伟刚等人[3]设计了一种照明节能模糊控制系统,该系统对采集到的亮度、车速以及车流量等数据进行模糊处理后,自适应调节隧道入口与出口处的亮度,虽然节能效果显著,但隧道内部的实际亮度无法达到《公路隧道照明设计细则》[4]所规定的安全亮度;Qin L等人[5]设计了一种基于交通量的隧道照明控制系统,该系统在在白天采用比例—积分—微分(proportional-integral-differential,PID)调光控制,在夜间采用“车进灯亮,车走灯暗”的控制方法,该控制方法能满足安全驾驶的需求,缺点是在白天仍是全时段开启照明,在车流量较小的隧道节能效果还有待提高。
本文研究设计了一种基于车辆感知和模糊PID的隧道照明控制系统,通过车辆检测控制隧道照明的开关,通过亮度探头实时采集隧道内外的亮度,并依据《公路隧道照明设计细则》[4]使用模糊PID调节发光二极管(LED)灯使隧道内亮度达到安全驾驶的需求。该系统能有效避免“黑洞效应”和“白洞效应”,同时有效降低隧道照明的能耗。
1 隧道照明系统设计
1.1 系统结构
隧道照明控制系统的结构示意图如图1所示。系统主要由数据采集单元、亮度调节单元和数据处理及控制单元三个模块组成:1)数据采集单元由亮度探头、车辆检测器和智能电表组成,用于采集车流量、车辆有无、隧道内外亮度以及消耗功率等数据;2)亮度调节单元主要用于控制隧道灯的开关和使用脉宽调制(pulse width modulation,PWM)调光方式控制隧道灯的照明功率;3)数据处理及控制单元由运行Windows 7系统的控制主机和两个STM32单片机组成,其中STM32用于将数据采集单元采集的数据传输到控制主机,以及将控制主机发送的调光指令转换为PWM脉冲信号,控制主机使用给定的模糊逻辑计算需要调节的电压大小,并提供人机交互界面。

图1 隧道照明控制系统结构
1.2 硬件设计
1.2.1 亮度检测电路
亮度传感器采用BH1750环境光传感器,该传感器内置16位的模数转换器,能通过双行串行接口(I2C)直接输出数字信号。亮度检测电路如图2所示,BH1750芯片的SCL为时钟线,SDA 为数据线,分别与STM32的PB6和PB7连接,DVI为I2C总线的参考电压终端同时也是异步重置终端,在VCC供应后必须设置为电源掉电模式。
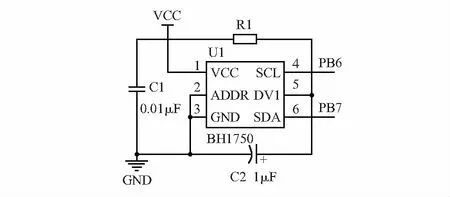
图2 亮度检测电路
1.2.2 调光控制电路
调光控制电路如图3所示。
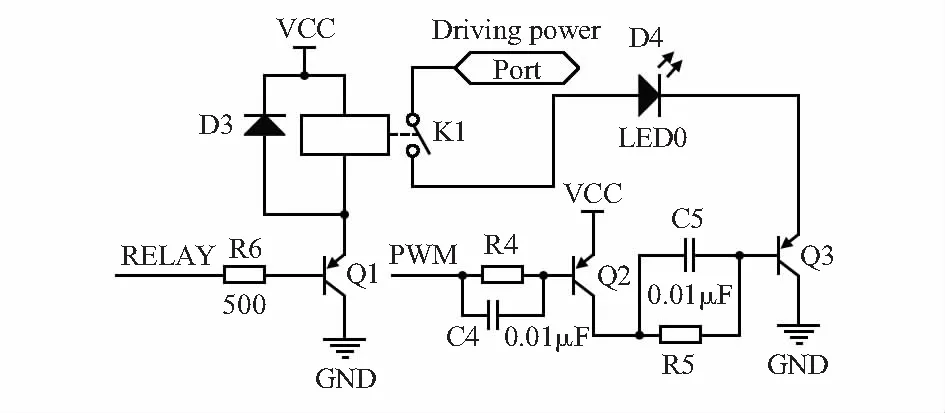
图3 调光控制电路
本系统使用电磁继电器用于LED的开关,由于STM32所输出的电流无法直接驱动电磁继电器,所以采用PNP晶体管作为放大电路来驱动线圈的闭合,又由于电磁继电器是电感性负载,为保护继电器,将D3作为续流二极管进行保护。STM32输出的PWM信号无法直接作用于LED,故使用STM32的PWM输出与NPN晶体管Q3相连,通过控制Q3的通断控制LED的亮暗从而起到调光的效果。
1.2.3 车辆感知电路
系统的车辆检测采用霍尼韦尔公司的HMC1001磁传感器,该传感器能将磁场信号转换为电信号[6]。该传感器的输出为差模信号,在传输过程中易引入共模信号,故采用仪表放大芯片AD623来抑制共模信号,典型电路如图4(a)所示。HMC1001传感器在受到强磁场的干扰时,输出会有严重的误差,为了消除该影响,在每次测量前需对HMC1001进行复位,复位电路如图4(b)所示。
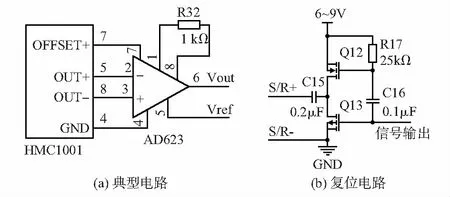
图4 车辆检测电路
1.3 软件设计
1.3.1 系统工作流程
系统工作流程如图5所示,隧道入口处的车检器检测到有车通过时,开启隧道内的照明并使车辆计数加1,同时收集车流量、车速以及隧道内外的亮度数据,依据《公路隧道照明设计细则》计算出隧道内部的需求亮度,之后使用模糊PID算法实时调节隧道内LED的照明功率,使隧道内实时亮度在车辆抵达隧道入口处前达到安全亮度。若隧道出口处的车检器检测到有车经过,则将车辆计数减1,当车辆计数为0时,表明隧道内没有车辆,此时关闭隧道内的照明,调光结束。
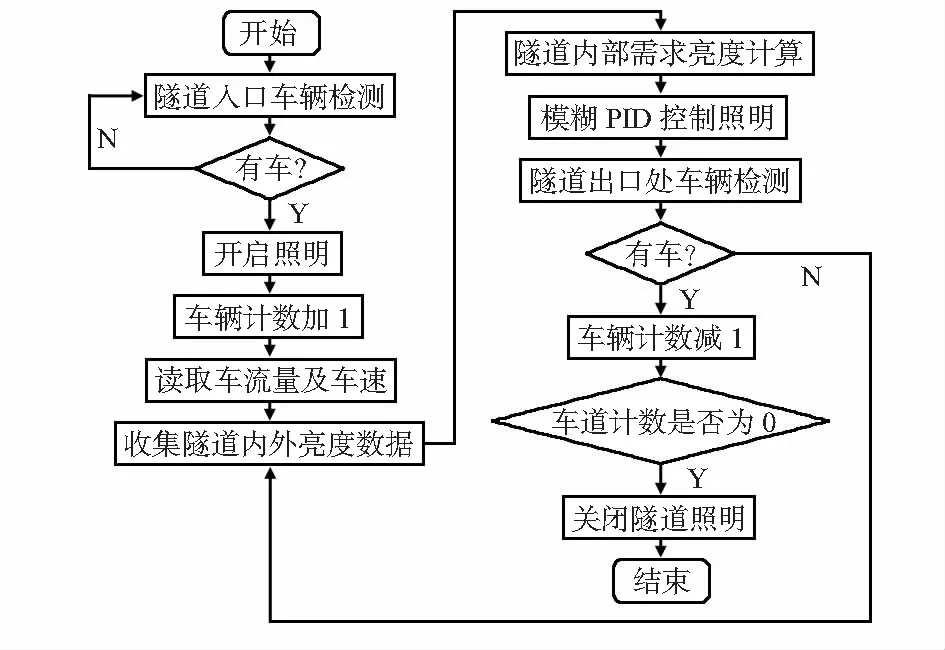
图5 系统工作流程图
1.3.2 模糊PID调光控制
隧道照明控制系统的模糊PID控制器的结构图如图6所示,其中Rin为需求亮度,Rout为经过调节后的实际输出亮度,e为亮度偏差值,ec为偏差变化率。每次调节前,模糊控制器通过分析输入e和ec,不断调整PID控制器的比例系数(Kp)、积分系数(Ki)和微分系数(Kd),从而满足不同的e和ec对控制器参数的要求,使被控对象具有更好的动态性能[7]。
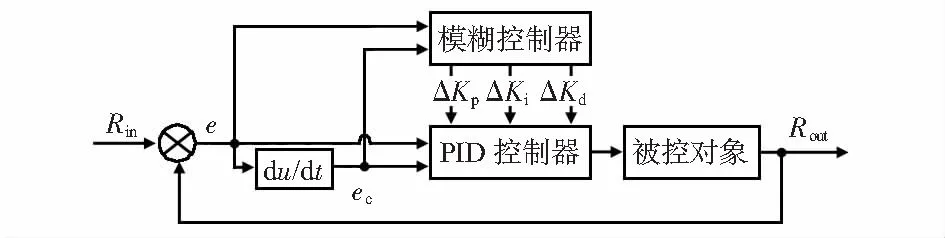
图6 模糊PID控制器结构图
模糊控制器主要由模糊化、模糊控制规则和反模糊推理三个模块组成。
1)模糊化是将控制系统的偏差及偏差率的值映射到对应的模糊语言变量值[8]。本系统将亮度偏差值、亮度偏差变化率以及输出的PID参数的论域设为[-3,3],将模糊控制器的输入和输出变量的模糊子集均划分为{NL,NM,NS,ZO,PS,PM,PL},即{负大,负中,负小,零,正小,正中,正大}。
2)模糊控制规则作为模糊控制的最重要的部分,设计时需要充分考虑其完整性,并避免相互矛盾的控制规则,依据相关技术及实践经验建立的模糊控制规则如表1所示。

表1 输出变量模糊控制规则表
3)利用重心法进行反模糊化[9],可以得出PID控制参数的调整量。PID控制器的参数实时校正公式如下
Kp=ΔKp+Kp0,Ki=ΔKi+Ki0,Kd=ΔKd+Kd0
(1)
式中Kp0,Ki0,Kd0为PID控制器的初始值,一般使用试凑法确定[10]。
1.3.3 上位机设计
上位机使用Visual Studio为开发平台,基于C#语言编写,提供图形显示界面及人机交互功能。通过串口通信,能够显示实时亮度、色温、功率等数据,并实现隧道内部亮度的实时控制。上位机软件如图7所示。
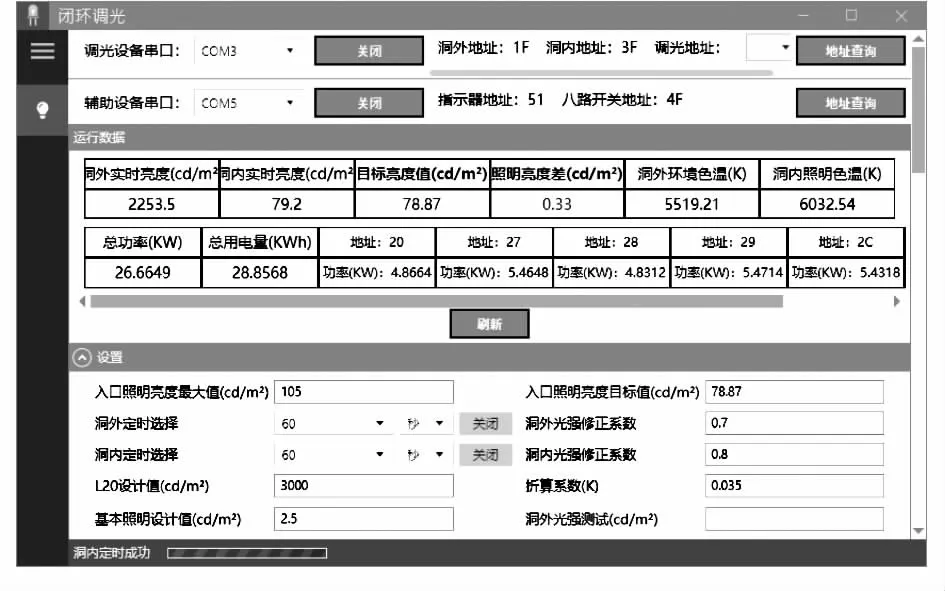
图7 上位机软件
2 实验结果与分析
2.1 车辆感知分析
由图8可以看出,当有小车经过时,采集到的电压会有较为明显的变化,通过判断车辆感知电路的电压变化情况可以判断出是否有车辆经过。
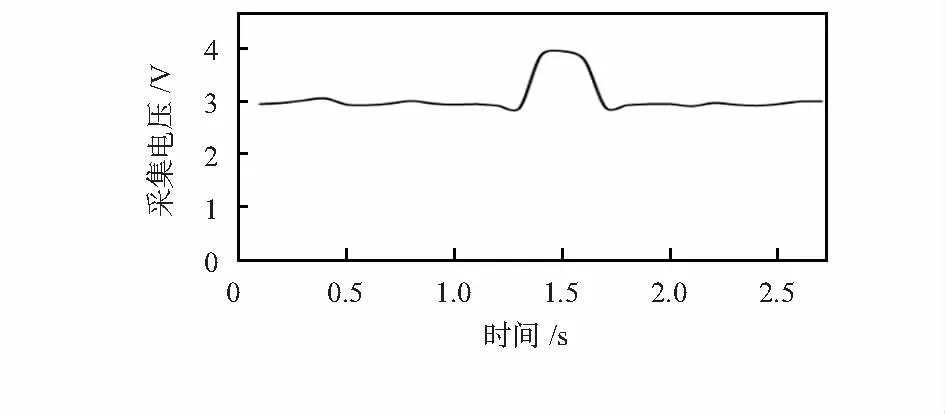
图8 车辆感知电路检测电压
2.2 调光效果分析
使用MATLAB对模糊PID及传统PID照明控制进行仿真,仿真结果如图9所示。从图中可知,理想状态下模糊PID和传统PID控制的调光速度相差不大,但发生光衰现象后,使用模糊PID控制达到安全亮度的时间和达到稳态的时间明显短于传统PID控制。故使用模糊PID控制的具有更好的抗干扰性,能有效的减少光衰现象对调光系统的影响,延长LED灯的使用寿命。
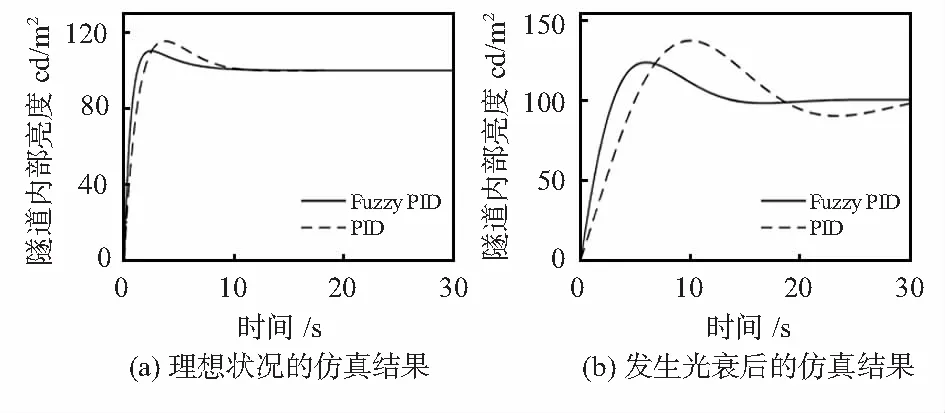
图9 仿真结果对比
3 结束语
本文设计了一种基于车辆感知和模糊PID算法的隧道照明节能控制系统,系统采用“车进灯亮,车走灯灭”的控制策略,并使用模糊PID算法控制隧道照明,加快隧道内部亮度的调节速率并且减少光衰现象对照明系统的影响。在保证了驾驶员安全的同时,最大程度地减少了隧道照明的电能损耗。
