基于激光雷达巡检机器人的变电站三维地图构建*
2021-03-05鲁锦涛董元帅张庆伟
鲁锦涛,王 庆,董元帅,张庆伟
(1.东南大学 仪器科学与工程学院,江苏 南京 210096;2.南瑞集团(国网电力科学研究院)有限公司,江苏 南京 211106;3.智能电网保护和运行控制国家重点实验室,江苏 南京 211106)
0 引 言
变电站的巡检工作主要是日常对变电站设备、仪表进行巡查[1,2],保证其正常的工作。为了实现变电站的自动巡检,巡检机器人[3]得到大力发展。文献[4]对多种变电站巡检机器人进行了介绍,其可使用多种传感器实现变电站的巡检工作。
国内用于巡检的机器人所用传感器一般有差分全球定位系统(global positioning system,GPS)[5,6],激光雷达(LiDAR)[7],视觉传感器等。其中基于GPS或者北斗等卫星信号的定位方式容易受变电站环境的干扰,鲁棒性差,一般的二维激光所建的栅格地图在面对复杂且相似的环境时易出现错定位,基于视觉传感器的机器人易受光线的影响,夜间无法进行正常的巡检工作。基于三维(3D)激光的三维地图构建可为机器人提供更准确地图,提高变电站巡检机器人的稳定性,且可供三维可视化,具有很高应用前景。
本文主要介绍基于三维激光的巡检机器人系统[8],并且将三维激光的点云信息用于三维地图构建,使用改进的点云匹配算法解决相似环境误匹配的问题,提高地图的可靠性以及可视性。
1 场地与机器人系统设计
1.1 变电站场地
变电站是在电力系统中对电压和电流进行交换以及电能分配的场所,场地中由很多支架柱构成,规模大同小异,多为圆柱形外观,导致变电站的场景多处极其相似,对建图造成较大困难,场地实景如图1所示。

图1 变电站场地实景
1.2 机器人硬件系统
变电站巡检机器人硬件组成部分包括传感器模块、主机、机动单元以及电源部分。传感器部分包括三维激光雷达、惯性测量单元(inertial measurement unit,IMU)、可见光相机等度量器件,主机选用工控机用于对传感器的数据进行处理,机器人采用轮式行进方式,保证数据采集的平稳性。本次实验所用硬件模块具体框图如图2所示。
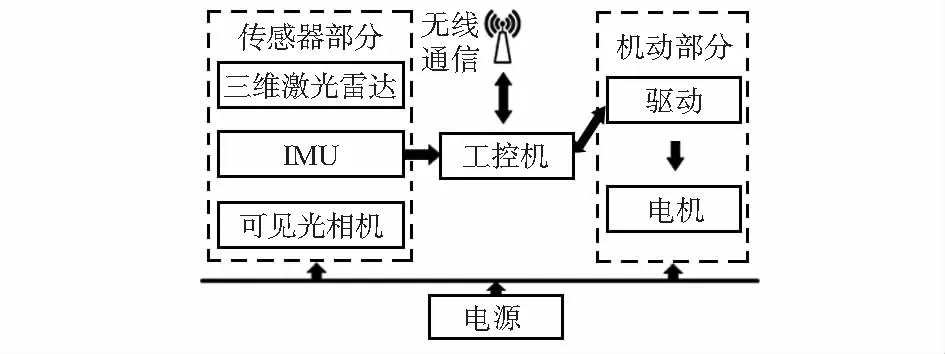
图2 机器人硬件系统
1.3 三维点云显示
此系统是基于机器人操作系统(robot operating system,ROS)的开源操作系统,采用ROS的Topic,以节点式对数据进行获取、处理以及显示。
选用的三维激光雷达为16线,雷达扫描一圈称为一帧。在算法中将获取的一帧一帧的点云数据使用点云库(point cloud library,PCL)转换成.pcl格式的点云数据。通过迭代最近点(iterative closest point,ICP)算法进行点云匹配以及位姿估计,将每一帧新的点云数据与上一帧进行联结,不断更新地图,实现变电站的三维地图构建。
2 基于ICP的点云算法
基于三维物体的配准问题,主要是根据两组在不同三维坐标系中的三维点云数据的匹配关系,求解出两组点云数据的空间变换关系。这其中ICP算法[9,12]是在3D点对的位姿估计中使用最广泛、最成熟的一种算法。经典ICP算法中使用的点与点的对应关系为
d=min‖B-(R·A+t)2‖
(1)
式中R和t分别为点云集A到点云集B的旋转矩阵和平移向量,构建的目标函数为两组点云集之间的距离。算法会对每一帧点云集中的点进行遍历处理,通过寻找其最邻近点,然后构造相应的目标函数,进而求解出两帧之间的位姿R和t。算法流程图如图3所示。

图3 基本ICP算法流程图
由于变电站场地中圆形立柱过多,导致场景中多处相似度过高,仅依靠搜寻最邻近点的方式进行点云匹配,极易造成误匹配,最终导致位姿求解出错,地图严重失真。如图4所示,在机器人刚进入场地时,局部场地可以准确重现,当机器人行进至场地中部时,无法在相似场景中进行区分,地图逐渐变形,圆形立柱被拉长,机器人的行进路径跟踪出错,地标发生严重偏移。

图4 失真地图
3 基于特征的改进算法
3.1 点云特征提取
传统ICP算法在复杂场景中已经无法解决相似度高的问题,本文对雷达点云数据进行特征提取[10,11],以进行更鲁棒的特征匹配。遍历点云集,对所有的点分别求出其与前后5个点的偏差,以x坐标为例
(2)
从式子中可以看出,由于无法提供足够的数据,计算时会自动抛弃每一帧点云的前后5个点,同时dy和dz采用相同的式子进行计算求值,最终由式(3)计算出每个点的曲率值,作为对三维点进行特征区分的依据
Curvature=(dx)2+(dy)2+(dz)2
(3)
根据所求得的曲率值,将点云集中的点分为角点和平面点,评判根据实验调节具体参数,如式(4)所示

(4)
通过建立上面的约束,对要处理的点云进行特征分类,如图5所示。
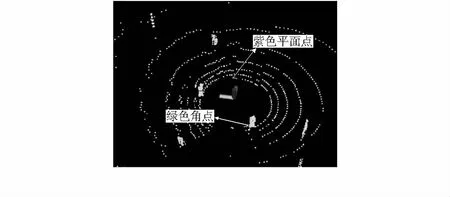
图5 特征点提取
根据曲率可将角点和平面点筛选出来,便于后续算法基于特征进行点云匹配,减少误匹配的出现。
3.2 改进点云匹配算法
与传统ICP算法不同,本文采用的改进算法不再只依赖寻找最邻近点构造三维点对关系。根据提取的角点和平面点,重新构造两类对应关系:1)在前一帧中找两个点,使之构成的直线距当前帧中的所求角点距离最近,从而构成配对关系;2)在前一帧中找三个点,使之构成的平面距当前帧中的所求平面点距离最近,从而构成配对关系,如图6所示。
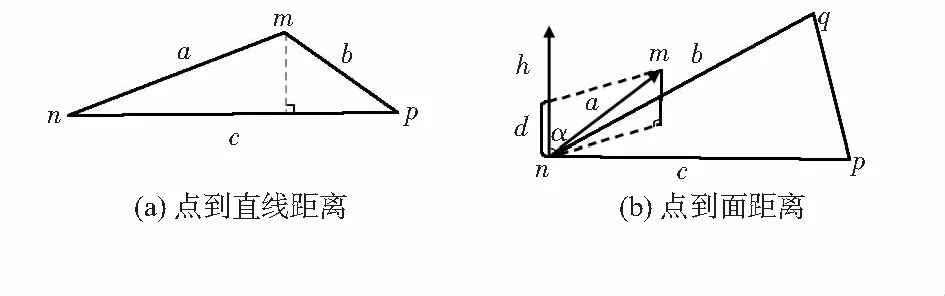
图6 对应关系示意
在图6(a)中为点到线的距离,通过构造三角形,可由三角形的面积公式得到点m到np的距离为
(5)
式中C为边c所对角的角度大小,从该式可构造第一种目标函数
(6)
式中k-1为该点为第k帧的前一帧中的点。同理,图6(b)中为当前帧中的平面点到所匹配平面的距离的示意图,根据所画图示,易写出求解d的表达式
(7)
由式(7)可构造出算法所需的第二种目标函数式(8)
(8)
根据式(6)和式(8)可建立目标函数,用Gauss-Newton非线性优化迭代出最优的位姿估计,用于纠正获取的点云数据,并累计姿态变化,将新的点云数据加入到地图中,构建变电站的三维地图。
4 实验结果
根据改进点云匹配算法,对变电站的点云进行特征提取以及采用新的匹配方式,重新对变电站的三维结构进行建图,实验结果如图7所示。

图7 变电站三维地图
从图7的全局地图中可以看出,基于特征提取的改进点云匹配算法能够有效解决误匹配的情况发生,在机器人进入变电站中部以及在进行转弯等易造成较大误差的地方,依然能够进行正确的点云匹配,构建完整的变电站的三维地图。图7右上角是局部放大图,为变电站局部支架柱的俯视图,从图中可见,该地标物不仅没有出现偏移,而且点云基本还原其圆形特征。
5 结 论
本文中基于三维激光的变电站机器人系统,通过改进的点云匹配算法,对点云数据进行特征提取从而进行更准确的点云匹配,提出点到线以及点到面的约束方程求解位姿,有效解决相似场景中误匹配的问题,完整地重现变电站的三维特征,建立的三维地图可用于机器人的自主巡航以及可视化显示,有极大的应用前景。
