“华龙一号”厂区应急撤离仿真系统开发研究
2021-03-05储进昌马义涛
储进昌,马义涛
(中国核电工程有限公司 郑州分公司,河南 郑州 450051)
核电厂应急撤离能力的分析评估是核电厂应急准备和应急响应的重要基础,安全局要求“营运单位应进一步结合实际情况,按照保守情况对场内外人员应急撤离方案进行分析评价”,因此有必要开展应急撤离能力的模拟分析工作。
核电厂的应急撤离能力,是核电厂应急计划制定以及应急响应行动的实施需要考虑的重要因素。评估应急撤离能力的主要方法是估算撤离时间。通过对应急撤离状况下的各种状况进行模拟分析,生成应急撤离的时间,可以对撤离方案进行排序和优化。在应急响应阶段,估算实际可能的撤离时间,可以为选择适当的应急响应策略提供技术支持。
为完成福清核电厂“华龙一号”机组工程运行阶段环境影响报告书的编制工作,需开发“华龙一号”厂区应急撤离仿真系统,本文以二、三维结合的形式,对应急撤离状况下各种情况进行模拟分析,生成应急撤离的时间,为在应急响应阶段,决策者选择适当的应急响应策略提供技术支持。
1 设计思路及理念
目前国内在应急撤离能力仿真模拟分析系统方面的研究相对较少,大部分都是在国外有关交通流模拟分析系统的基础上进行研究,形成文本报告。这些分析系统基本都是对交通流的模拟仿真,不是针对核电厂的应急撤离能力进行仿真模拟分析,并且最终形成的文本报告基本不能让高层决策者对事故风险有更直观的感触。
针对该问题,“华龙一号”厂区应急撤离仿真系统建立了全厂区内三维模型,厂外宏观二维卫星地图,在该基础上,根据《场区非应急人员集合、清点与撤离规程》方案,设置各种属性信息,结合核电厂的特殊情况,对厂区应急撤离进行模拟仿真分析,并形成分析数据报表,可以直观的对核电厂非应急人员的应急撤离能力进行仿真模拟分析。
2 具体设计方法
具体设计方法如图1所示。

图1 技术路线Fig.1 Technical route
(1) 资料收集
资料收集需要收集厂址周围环境状况以及核电厂的设计图纸和三维模型,为构建三维模型场景提供资料支持。同时,收集核电厂《场区非应急人员集合、清点与撤离规程》方案,为系统策划提供指导。
(2) 系统策划
对厂区内、厂区外应急撤离状况下的混合交通流、公共车辆的调度、系统不确定性的要素,以及对应急撤离的影响因素等进行分析策划。
(3) 模型处理
对 AVEVA PDMS三维设计软件导出的三维设计模型,进行拆分以及轻量化处理[3],然后对模型进行修复和展 UV工作,最后使用 Substance Painter对各个专业的模型进行贴图。
(4) 场景集成
三维场景集成是把所有的三维模型集成到一个三维场景中。使用 Unity对所有的模型和材质进行集成。为了保证该模拟分析系统运行流畅,还需要在 Unity中对全厂区内的场景进行烘焙处理,降低实时灯光对计算机性能的消耗,提升该模拟分析系统的流畅度[1,4]。
(5) AI寻路算法开发
在发生核事故的情况下,在核设施场区的工作人员必须立即撤离。采用在 A* 最短路径寻路算法的基础上,对算法的权重值进行处理,从而实现人员、车辆的自动寻路、动态避障、互相避免碰撞,以满足人员、车辆能够自动寻路到目标点,在该过程中能够规避障碍、避免拥堵[5,6]。
(6) 交互功能开发
根据策划的要素以及交互逻辑,使用Axure交互设计软件设计整个系统的高保真交互原型,使用Adobe Photoshop设计出界面元素,结合交互界面、AI寻路算法以及全厂区内场景,在Unity开发平台中,使用Visual Studio工具开发出系统的整体交互功能[1,2]。
(7) 数据统计分析与报表功能
根据系统策划,开发出能够生成终点人数/时间曲线图、集合点人数/时间曲线图、统计点车数量/速度曲线图、单车速度/时间曲线图、撤离车辆到达撤离节点的时间分布图、相应的人员撤离的时间分布图,并记录集合点坐标、人员车辆撤离详细时间、厂区撤离节点(指厂区人员撤离到的厂区边界的位置)的经纬度信息等数据,并能够保存成HTML格式和Word格式的数据分析报表[2]。
3 关键技术
为了满足系统运行流畅以及仿真准确的要求,该系统的关键技术是三维模型快速轻量化技术、大场景集成技术、AI寻路算法。
3.1 三维模型快速轻量化技术
根据核电行业三维模型的特点,主要通过模型精简、模型孔洞修复和模型重建等轻量化过程的开发综合实现[3]。三维模型轻量化技术路线如图2所示。
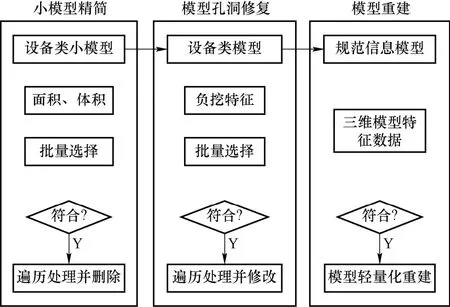
图2 三维模型轻量化技术路线图Fig.2 3D model lightweight technical route
3.2 大场景集成技术
大场景集成技术可以把所有的三维模型集成到一个三维场景中,在场景中创建真实环境资源(如灯光、天空盒子等)并保证系统运行流畅。
由于全厂三维模型具有海量的数据,虽然模型经过轻量化,但数据量还是很大,通常一个中型厂房的数据量就会导致系统运行卡顿。为了保证计算机运行流畅,使大场景集成成为可能,根据之前项目积累的经验,首先,对零散的模型进行适当的结合,保证单个模型具有合适的规模;其次,修改模型贴图的大小到合适的尺寸,节省渲染内存资源占用;最后,关闭实时灯光,取消实时渲染,通过对场景进行烘焙处理实现静态光照,节省系统资源。通过以上操作,实现了大场景的集成[1,4]。
3.3 AI寻路算法
AI寻路算法是在A* 最短路径寻路算法的基础上,对算法的权重值进行处理,从而实现人员、车辆的自动寻找最短路径、动态避障,以满足人员、车辆能够自动寻路到目标点,在该过程中能够规避障碍、避免拥堵[5,6]。
该算法是解决厂区应急疏散中的人员撤离路线的最优选择问题。通过对集成模型场景中的区域平面进行网格化;通过算法计算以人员所在中心最近的 8个网格单元的路径距离,离目标撤离集合点的距离进行估值,并考虑周围障碍物的规避情况;通过程序不断进行遍历和迭代,实现最终最优路线的计算和优选。算法关键技术实现主要分为以下几个过程[5,6]。
(1) 确定寻路移动方法
网格移动及距离估算处理采用国际上的Chebyshev Distance方法。该方法可以实现在网格中使用对角线距离,避免使用“水平”和“垂直”移动的拆线路线和呆板表现。Chebyshev Distance方法的移动方式如图 3所示,规划的路径1和路径2均采用了对角线和水平垂直线结合的方式实现。

图3 应急疏散自动寻路移动方式Fig.3 Mobile mode of automatic route finding for emergency evacuation
(2) 建立寻路算法
在 Chebyshev Distance方法的移动方式基础上,实现在应急疏散过程中自动寻找最优路线。算法核心是:首先以出发点所在的网络中心,对周围的 8个网格单元,每个单元格进行与目标集合点的距离估算。
距离估算值由两部分相加组成,以出发点周围的 8个网格单元其中之一为例。一部分是由出发点到达周围的 8个网格单元中指定网格中心的最优路径距离估值,与此目标单元格距离目标集合点之间的方位有关;另一部分为此目标单元格距离目标集合点按水平垂直进行快速估值。
以图 4、图 5所示的距离估算示意网格为例。S为出发点,E为目标集合点,黑色网格为障碍物,每个单元格的长宽为10。对S周围8个单元格进行自动寻路算法的距离估算,8个单元格分别以1~8表示。对于2号网格,单元格的左下方数值14为出发点S到达此单元格选择对角线的优选路径估算值;右下方数值30为2号网格距离目标集合点E的最短距离。通过计算可以得出S周围8个单元格的估算值,其中2号网格距离44为第一次计算最优路径,移动至2号网格为对角线。第2次迭代时,以2号网格为中心,周围有2个障碍物单元格,对周围网格迭代后,9号距离估算值最小,采用对角线移动。

图4 自动寻路算法距离估算示意网格图1Fig.4 Schematic grid diagram of distance estimation for automatic routing algorithm 1

图5 自动寻路算法距离估算示意网格图2Fig.5 Schematic grid diagram of distance estimation for automatic routing algorithm 2
4 结论
通过以上叙述,开发出“华龙一号”厂区应急撤离仿真系统,该系统能够对厂区内、外人员撤离的情景进行分析和仿真推演,对整体撤离时间、每个人员在每个阶段的撤离时间、每辆车在每个阶段的运行时间、集合点人员数量、统计点车辆信息、大门口人员数量等进行数据分析,可以为核电厂进行应急撤离或隐蔽等防护行动决策提供技术依据,并应用到福清核电5、6号机组工程运行阶段环境影响报告书的编制工作中,为环境影响报告书提供了更充分的背景资料,同时,也可为三维设计模型的进一步应用提供思路。
