多传感器融合车载电池舱灭火方法研究
2021-03-05刘煜,周锐,赵杰
刘 煜, 周 锐, 赵 杰
(陕西重型汽车有限公司汽车工程研究院, 陕西 西安 710200)
随着时代发展,电动汽车逐步成为各大主机厂研发的重点,电池作为其中的核心,安全问题也一直备受重视。多传感器融合车载电池舱灭火方法研究,通过温度、烟雾浓度传感器实时监控环境,考虑单一传感器失效及误报,将可靠性理论应用至车载电池舱领域,实现对火灾的自适应判断。
针对火灾过程,国内学者对火灾发生的典型特征进行分析,综合多传感器进行相关研究。傅天驹、郑嫦娥、田野等提出一种深度学习的森林火灾识别算法,运用卷积神经网络进行训练[1]。孙福志、于军琪、杨柳提出一种火灾识别算法,利用粗糙集理论,设计火灾特征的知识系统,实现对火灾的良好识别[2]。Tansky D提出一种多分辨率传感器数据融合的灭火算法,将扫描的信息集成至一个模型中,实现了模型数据的融合[3]。

图1 系统结构图

图2 模型拓扑结构
1 模型拓扑图设计
自主开发的车载电池舱灭火系统,其系统结构如图1所示,包括温度巡检仪、烟雾传感器、中央控制器、报警模块及灭火弹。当系统监测到温度和烟雾信息后,中央控制器进行数据存储,并通过液晶显示模块实时显示,当触发灭火时,中央控制器输出电信号触发灭火弹喷射。
火灾发生可通过温度、烟雾浓度等变量参数体现,不同阶段的变量参数值相差很大,在实际应用中,当传感器失效或存在误报情况时,对系统判断的整体影响较大。本文引入多传感器融合车载电池舱灭火方法研究,建立贝叶斯模型拓扑图,如图2所示,包括模型输入温度传感器值和浓度传感器值、上一状态与当前状态的评估以及是否最终着火的模型输出。
1.1 贝叶斯网络理论介绍
贝叶斯网络用二元组B=(D,P) 来表示,D表示由元素构成的有向无环图,P表示元素的条件概率,对于元素来说,其结果表示为条件概率P(Xi/π(Xi)),其中π(Xi)表示该元素的上一元素代表的变量值,综合元素得出的联合概率分布函数如式(1) 所示。

1.2 仿真验证
本文运用Netica软件进行贝叶斯网络模型设计,如图3所示,输入变量有:temp1~temp6代表温度传感器值的先验概率,smoke、tempterature分别表示烟雾传感器浓度及温度传感器判断火灾发生的极大后验概率,fire表示最后综合判断火灾发生的条件概率,temp1~temp6、tempterature的初始发生火灾概率设为50%。
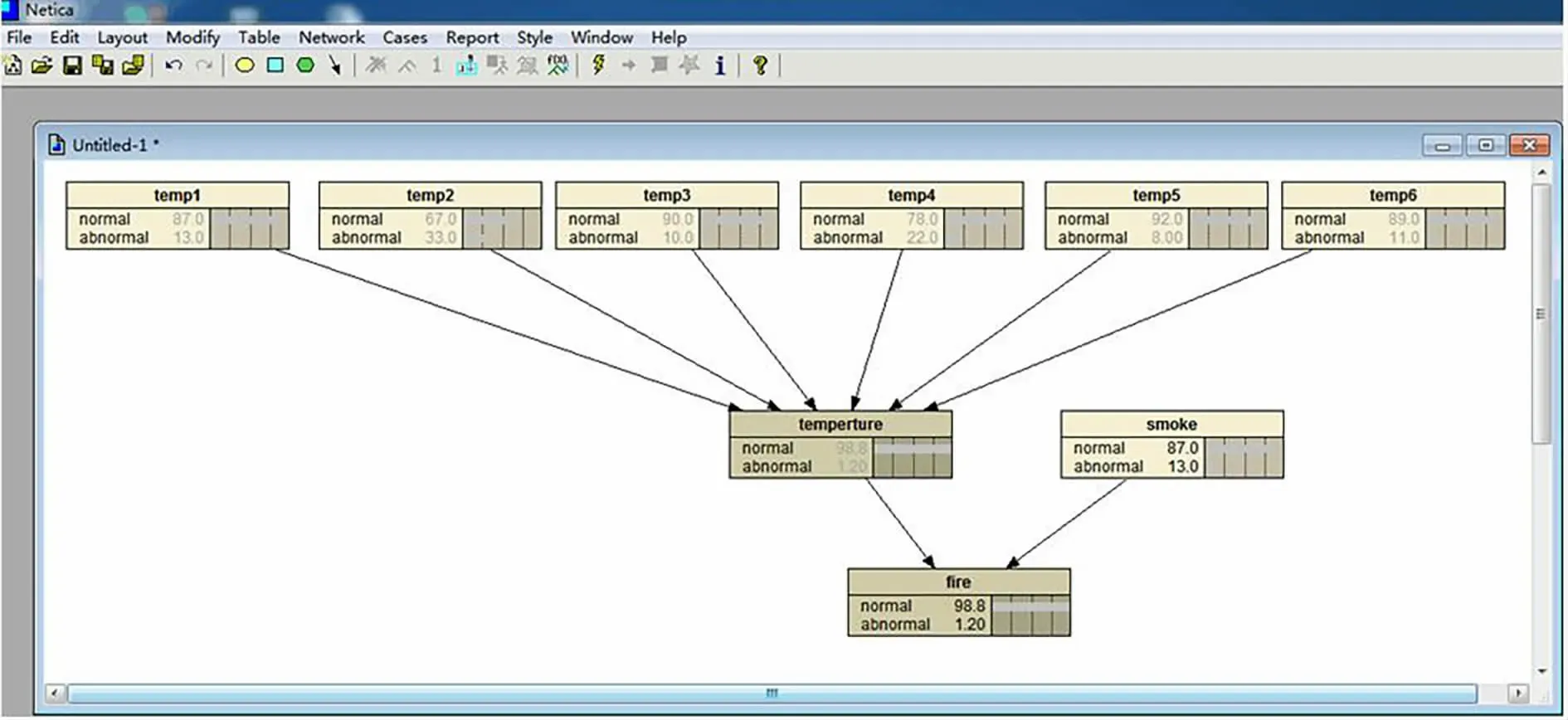
图3 火灾判定贝叶斯网络模型
火灾概率分布如图4所示,发生火灾表示为abnormal,未发生火灾表示为normal,初始状态概率均设为50%,后续概率随数据变化而变化。
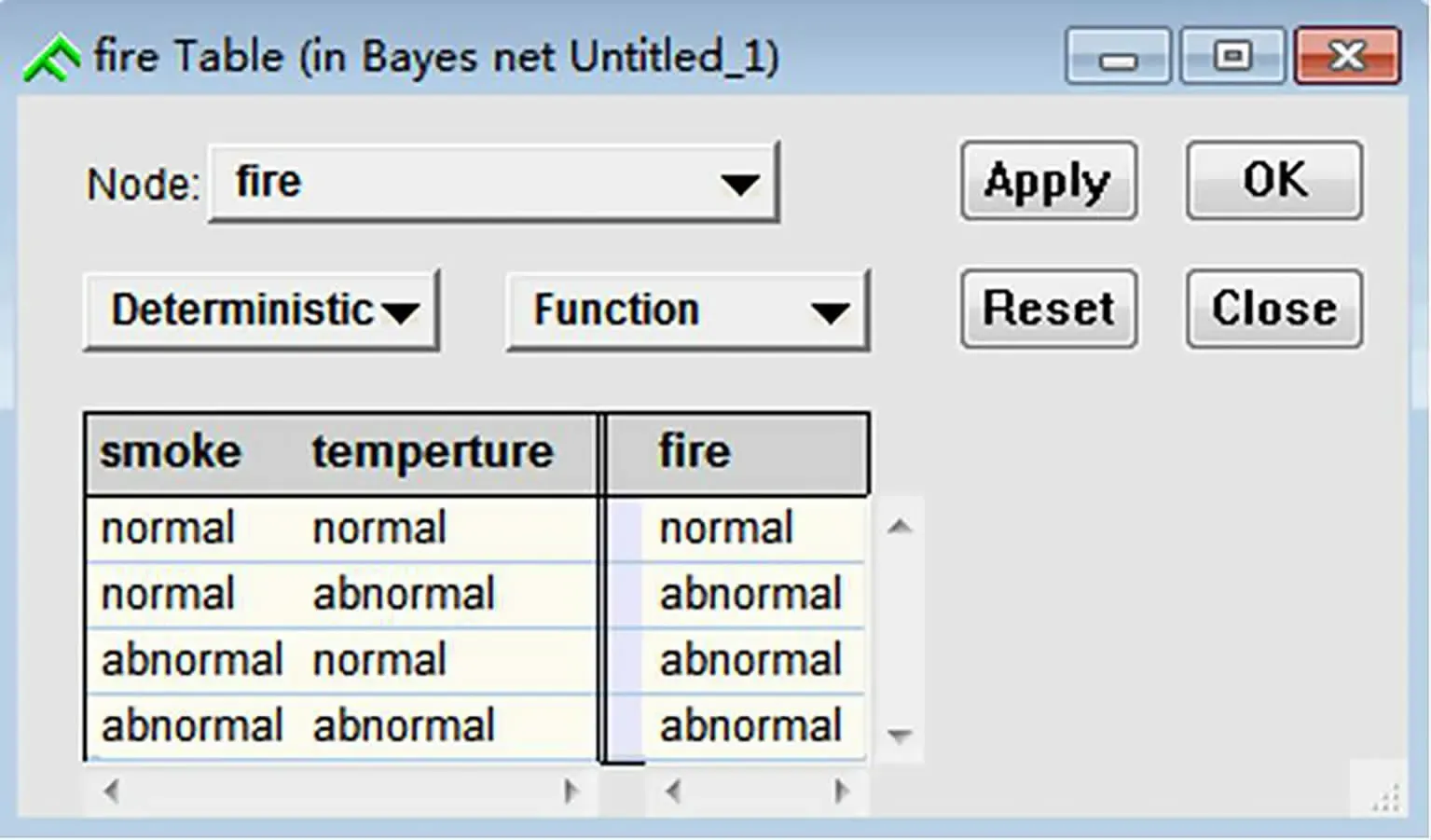
图4 火灾概率分布
将参数T1,T2,T3,T4,T5,T6,Ci和输出变量P代入式(2):

式中:状态变量T1,T2,T3,T4,T5,T6——温度传感器1~6的温度值;Ci——烟雾浓度;观测P——是否发生火灾。
依据图2的模型拓扑结构图,将变量代入得出有向边集合,见式(3):

当实际获得了某一时刻的全部输入变量 (假设为W),见式(4):

是否着火(假设为M) 的条件概率,见式(5):

由式(6) 得出未着火的后验概率PA,由式(7) 得出着火的后验概率PB,归一化,由式(8) 得出最终P1着火的极大后验概率P1。
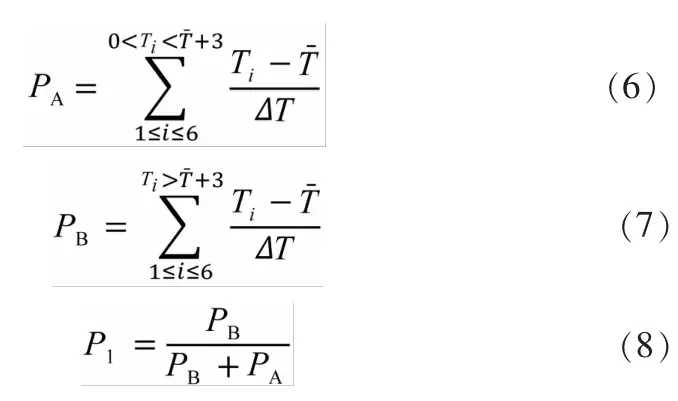
式中:Tu1,Tu2,Tu3,Tu4,Tu5,Tu6——单次测试中的温度值;ΔT——其温度中的最大温度与最小温度的差值;T——平均温度;Ti——单次测试中温度中的某一温度。
由式 (9) 得出未着火的后验概率PC,由式 (10) 得出着火的后验概率PD。

式中:Ci——实验实时采集的烟雾浓度数据;C——平均值,取测试的当次数据及前9组烟雾浓度数据。
归一化,由式(11) 得出烟雾判断着火的极大后验概率P2。最后由式(12) 得出最终着火的条件概率P。


图5 概率分布散点图
将当次温度数据25、34、26、25、29、29,烟雾浓度数据120、100、110、90、150、110、100、300、410、500代入数据计算得:
根据式 (10) ~(13) 计算出PA=0.25,PB=0.75,P1=0.75,P2=0.834。
最后计算得着火概率为P=0.9585。
如图5所示,运用Netica软件进行概率识别,0~100组数据表示未着火概率,其值为0;101~200组数据为着火概率,从0.5~0.8不等。根据着火概率统计分布,着火的概率区间处于0.6~0.8的组数最多,所以将概率阈值设为0.6,作为实车验证测试的阈值。
2 实车实验
2.1 热量分布规律验证实验
2.1.1 实验设备与环境
实测布局时,温度传感器1~6以中间支架为界,与支架左右各20cm的平行平面,以每隔30cm等距左右各放置3组温度传感器,温度传感器7布置于电池舱外侧,用于室温采集。为验证车载电池舱热量分布规律,实验所需设备为:火源(电暖器) 1个,温度传感器7个,实验车辆1辆。
为验证热量分布规律,实际测试时将火源放置于传感器3与4下方20cm处,传感器1、2放置于火源左侧20cm处,传感器5、6放置于火源右侧20cm处,传感器7用于室温的采集,之后将温度传感器1~6 与火源的距离设为30cm、40cm、50cm,分别测试6组传感器的温度数据,各记录62.5s,相关布局图如图6所示。
2.1.2 实验结果与分析
热量分布规律结果如图7~图10所示。
图7~图10中,火源正对中间传感器3和4,正下方20cm,传感器3和4的温度上升范围最大,温度从25℃上升到60℃,温度增长率最高,传感器1、2、5、6温度上升范围从25℃到50℃,其温度增长率低于传感器3、4。

图6 传感器布局图
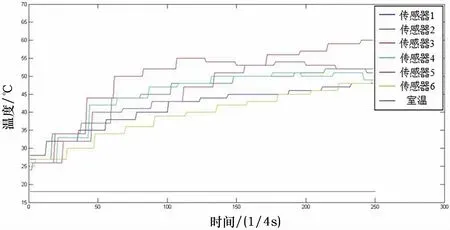
图7 距离20cm量测温度

图8 距离30cm量测温度
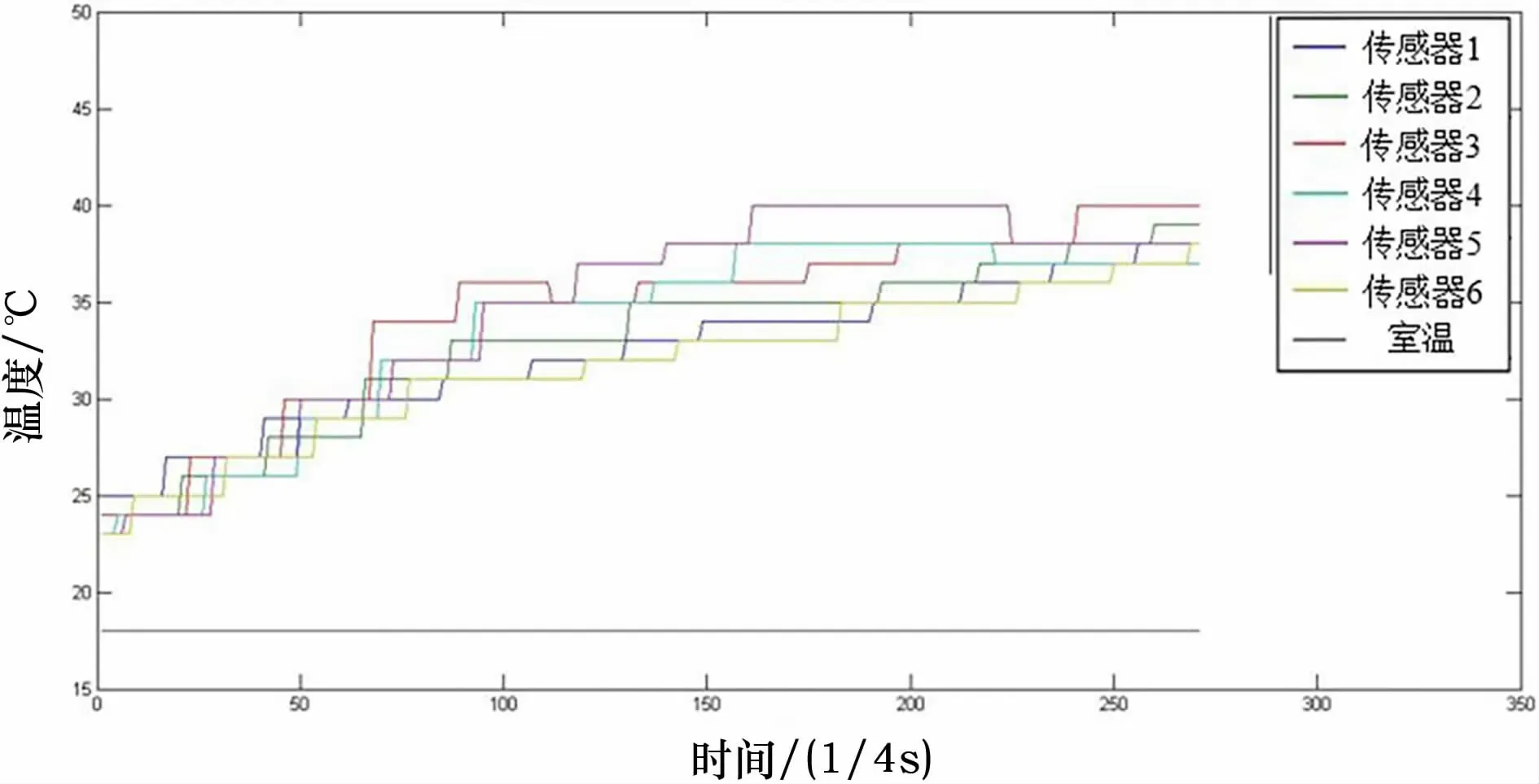
图9 距离40cm量测温度

图10 距离50cm量测温度
故得出结论,系统工作时,测得火源的热量先经由上方传递给左右两侧,当传感器距火源30cm以下时,可以获得较大的温升速率,故实际测量时将传感器布置于电池舱的上方30cm处,当电池舱着火时可以获得较快的温升速率,提高灭火系统的灵敏性。
2.2 电池舱放火实验
2.2.1 实验设备与环境
如图11所示,其中图11a表示车载电池舱智能灭火系统本体,图11b表示放火实验时使用的灭火弹,图11c表示设置火源着火后的效果图。

图11 灭火实验
灭火系统将传感器1放置于火源正上方30cm处,传感器2、3放置于传感器1左侧30cm处,传感器4、5、6放置于传感器1右侧30cm处,如图12所示。
2.2.2 实验结果与分析
放火实验结果如图13所示,不难得出,实际发生火灾时,火源的热释放速率曲线呈现火灾初期、发展、最大和衰退4个阶段的发展规律。由于车载电池舱环境相对密封、火源增长速度极快,本文模拟火源在7~10s之内就达到了最高温度值,其后续火势发展取决于燃料的供给,若燃料供给充足,则火焰会持续下去;若燃料有限,则随着燃料耗尽,车载电池舱环境温度会逐渐减低,火源会转变为中火,甚至小火,正对火源的温度传感器温度上升速率最快。
贝叶斯网络中,烟雾浓度是其中的观测变量,通过监测烟雾浓度变化规律,设置烟雾变化阈值,用于最终贝叶斯网络决策。图14中,实测火灾实验过程中烟雾浓度变化分为3个阶段:火灾前期,出现少量烟雾,0~6.5s,烟雾浓度呈上升趋势,从0上升至800ppm;火灾中期,燃料充足,烟雾浓度降低,6.5~20s,烟雾浓度呈下降趋势,从800ppm下降至100ppm,并在100ppm和200ppm之间波动;火灾后期,随着燃烧物耗尽,出现大量烟雾,烟雾浓度迅速上升,从200ppm上升至1800ppm。
2.3 贝叶斯网络结果分析
2.3.1 实验结果分析
采集100组实际着火数据继续分析,相关结果如图15所示。
根据图16分析可得,实际着火时,火灾发生的概率位于0.6~0.8的组数为90组,概率大于0.8的组数为6组,在0.5~0.6之间的组数为4组。从而可知正确报出火灾的次数为96组,存在4组误判,识别率达到96%。
2.3.2 传感器失效
考虑到传感器存在失效情况,实验分别将温度传感器1~6,以及烟雾传感器依次放在车载电池舱外后,进行着火分析,其正确识别率结果见表1。

图12 传感器布局图

图13 传感器温度变化图

图14 烟雾浓度变化图

图15 着火概率图

图16 火灾识别结果
3 结论
本文设计了多传感器融合车载电池舱灭火方法,通过综合采用温度传感器、烟雾传感器实现对火灾的实时监控,本文提出的火灾识别模型正确识别率达到96%,在单一传感器失效时仍可具备良好的火灾辨识能力。

表1 传感器失效正确识别率