不同步速下髋关节置换后股骨的应力分析
2021-03-04李咏壑高丽兰张春秋叶金铎
李咏壑,孟 昱,高丽兰,张春秋*,叶金铎
(1.天津市先进机电系统设计与智能控制重点实验室,机电工程国家级实验教学示范中心,天津理工大学,天津300384;2.天津市骨植入物界面功能化与个性研究企业重点实验室,嘉思特华剑医疗器材(天津)有限公司,天津300190)
0 引言
髋关节是连接躯干与下肢的重要枢纽,也是全身负荷最多、受力最复杂的关节。对于各种髋关节疾病,人工髋关节置换术已被证实是最重要和最有效的手术治疗方法[1]。作为一种带有重建性质的手术,髋关节置换术可以重建患者的髋关节功能,恢复患者正常的行走体验,但是由于置换手术前后股骨应力传递模式的改变造成了股骨应力的变化,从而影响植入物的稳定性,产生各种术后并发症[2],最终导致假体松动的发生;另外,股骨应力的显著变化容易增加骨折以及关节脱位的风险,大大增加了翻修的概率。因此,研究置换后股骨应力的分布具有临床价值。
步态分析是利用生物力学的概念、处理手段和已经掌握的人体解剖学、生理学知识,借助于现代计算机技术和图形图像技术,对人体的功能状态进行动力学分析的研究方法[3]。行走是人体基本的行为活动,能否正常行走对于髋关节置换后的患者具有重要的影响[4]。早在19世纪末,布拉温和菲舍尔就人为测定了人体步行时各部分的运动及惯性参数,并建立了首个人体分布模型,奠定了人体运动定量分析的基础[5]。20世纪以来,随着计算机技术的迅猛发展,自动运动监控程序替代了手工将图像转化成数据的过程,如今大都采用图像采集装备、传感器、足底测力平台等进行相关如关节角度、支反力、步态周期等参数的测量。如程亮[6]在2008年使用NDI运动分析系统进行人体下肢步态的实验,得出了下肢各关节步态下的位移、速度及关节角度的变化情况。王劲松等[7]对同一受试者在跑步机上以不同步速行走时的腰、髋、膝关节的运动轨迹和下肢各关节的相对转角进行了测量,研究表明随着步速的增大,髋关节的运动轨迹呈周期性变化,关节相对转角的范围增大。
有限元分析(finite element analysis,FEA)能将复杂的结构划分成有限个连续域的离散单元,通过对离散单元的相互关系分析来反映整体结构的应力、应变。FEA作为生物力学常用的一种研究方法,可以与步态分析相结合。唐刚等[8]分析慢走和上、下楼梯2种步态下髋关节置换后股骨的生物力学特性,表明上、下楼梯运动时,股骨应力分布的变化规律与慢走运动时大体相似,但应力遮挡效应更为明显。张洪等[9]建立了人体股骨的精确三维有限元模型,模拟人体正常步行的过程,施加的载荷不仅考虑了关节力还考虑了肌肉力,结果表明人体在行走时,股骨颈外侧有较高的拉应力,内侧有较高的压应力,股骨干的应力主要分布在中下段,若负荷过大,股骨颈区域容易产生过大的应力而破坏。对于国内外已有的髋关节置换的步态分析,其多直接选取髋关节应力峰值时的步态瞬间进行加载[10-12],而完整的步态周期是由多个连续不断的步态事件组成的,只截取某一瞬间进行分析缺乏整体性和完整性。同时,作为近年来广泛使用的置换假体柄,短柄假体(采用直接前方入路方式)置换后不同步速下股骨应力情况的研究尚未开展。已有的分析多为中长假体柄,因此对此方面的进一步研究具有重要意义。本文对行走时短柄假体置换后的股骨应力状态进行研究,并进一步探索步速改变后股骨应力的变化情况。
1 LifeMOD人体动力学仿真
LifeMOD是一款基于MSC.ADAMS的人体动力学开发软件,对人体运动可进行仿真分析,还可以预测非现实的人体极限运动。通过动态仿真分析获知在各种运动状态过程中人体所受到的力学环境,可为骨骼的力学状态研究提供条件。
1.1 模型建立
对步态的研究,使用LifeMOD模型,选择身高1.70 m、体质量73 kg的25岁男性(与后文有限元仿真模型相同),将其命名为“connor”,创建其下肢模型,如图1所示。
1.2 参数设定
在完成下肢模型的建立后,需要依次进行关节、标记点、地面接触、驱动的参数设定。为表示人与地面的关系,在设置接触时需要在地面上设置一个参考点,并确定其方向。根据模拟经验,地面接触刚度设为200,地面阻尼设为2。与其他运动仿真软件不同的是,LifeMOD在进行运动仿真时需要先进行逆向运动仿真,再将逆动力学仿真产生的关节角度等数据结果通过PD(proportional derivative)控制器重新产生力矩结果,然后进行正向仿真。正向仿真时,将平移刚度设为10,平移阻尼设为1,旋转刚度设为1 000 000,旋转阻尼设为10 000,各方向自由度设为Driven。为了保证有限元仿真的准确性,测量股骨的三维模型所得股骨长度为402 mm。在使用LifeMOD建模时,提前将股骨的长度设为400 mm再进行步态仿真,如图2所示。

图1 下肢模型

图2 人体各部位参数设定
1.3 步态仿真
在完成参数的设定后,首先进行逆向运动仿真,系统会记录逆向运动产生的关节角度数据,之后进行正向仿真时再将之前记录的关节角度等数据重新加载到模型上,从而完成步态仿真的过程。具体操作流程:Joints→Edit→Forward Dynamics→Specify the derivative gain and the Servo proportional gain→Apply、Motion→Create Tracker Agent→Specify all freedoms as driven→Apply、Analyze→Dynamics→-9806→End Time:2.5,Time Steps:250→Robust→Analyze。步态仿真如图3所示。
1.4 不同步速的仿真结果
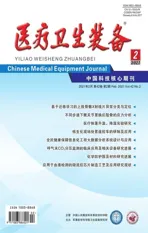
据研究统计,不同年龄段人群的步速会存在差异,而髋关节置换术中大多为老年患者,健康的老年人根据步速快慢可以分为慢速、中速、快速,速度分别约为0.7、0.9、1.1 m/s[13]。考虑到置换术后患者的行走速度会在一定程度上减慢,因此建议初始的步态仿真步速为0.61 m/s,然后通过修改步速,分别进行0.51、0.61、0.77 m/s(分别对应慢速、中速、快速)下的步态仿真,记录仿真后髋关节的矢状力、冠状力和横断力,结果如图4所示。
2 三维模型及有限元仿真
2.1 三维模型的建立
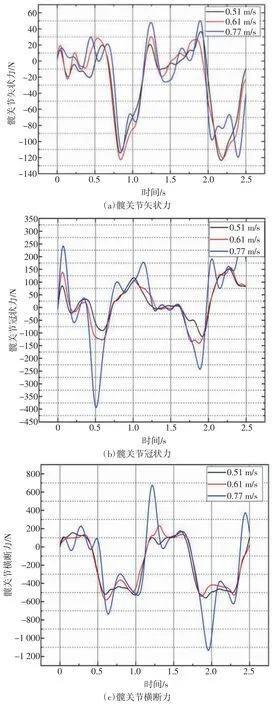
图4 不同步速下髋关节的力学条件
将CT图像数据(图层厚度为0.7 mm,380层,格式为DICOM)导入Mimics10.01,通过阈值设定、区域增长、腔隙填充等操作提取所需股骨模型的轮廓线。然后经过Geomagic软件构造格栅,生成光滑曲面,最后将处理好曲面的股骨模型以及国产的MINI微创短柄假体模型(如图5所示)导入Solidworks软件内进行截骨以及装配处理,置换完成后的模型如图6所示。截骨和装配时应该遵守以下原则:假体柄轴线与股骨干轴线重合,假体柄干尽量与骨髓腔匹配,假体颈轴线与股骨颈轴线尽量重合一致,假体颈轴线通过股骨头中心。股骨金属假体适宜的植入角度为外翻135°~145°[14]。

图5 MINI微创短柄假体模型

图6 假体置换后的股骨三维模型
2.2 有限元模型的材料属性
将SolidWorks中的模型以.x_t格式导入Abaqus中进行布尔操作,并对各部分进行网格划分和属性赋值。目前,我国的人工髋关节假体通常由假体柄、股骨头、聚乙烯衬垫、臼杯组成,通过查阅相关文献[15],本研究采用仿真的股骨弹性模量设为12 000 MPa,泊松比为0.35;假体等构件弹性模量设为105 000 MPa,泊松比为0.3。
完整的髋关节置换模型包含47 287个结点,223 437个单元,模型之间的接触对包括:臼杯内表面与衬垫外表面、衬垫内表面与股骨头外表面、股骨头内表面与假体柄头外表面以及假体柄柄身与股骨。将前三者设为绑定,假体柄柄身与股骨之间设为库伦摩擦接触,摩擦系数为0.2,设置完成的有限元模型如图7所示。
2.3 加载方式及边界条件

图7 髋关节置换有限元模型
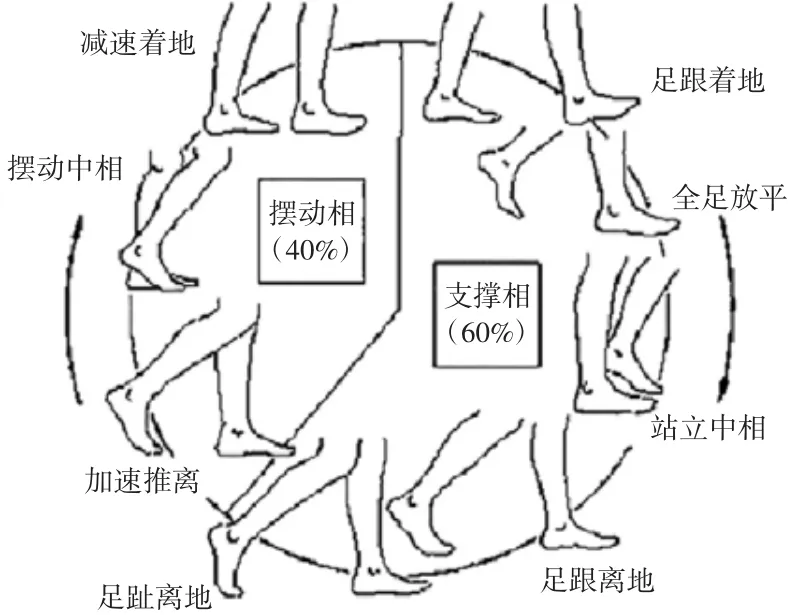
图8 步态事件的划分[16]
在步态中,地面的支反力具有重要作用,提供了人体站立时的支撑力,同时对髋、膝、髁关节力以及肌肉载荷的分配有重要影响。本文以人体右脚为参考,根据地面支反力在步态中的变化,将步态周期划分为8个步态事件[16],如图8所示。由于研究8个步态事件工作量过大,这里只选取支撑相阶段的全足放平、站立中相以及摆动相阶段的加速推离、摆动中相作为研究对象。以股骨头中心为原点,沿着人体力线建立局部坐标系,X轴为垂直于人体矢状面(将人体分为左右2个部分的面)向外,Y轴为垂直于人体冠状面(将人体分为前后2个部分的面)向前,Z轴为垂直于人体的横截面(垂直于梁的轴向的截面形状)向下。根据之前LifeMOD的仿真结果,对照各步态事件在步态周期内的时间占比,记录各步态事件下髋关节各方向力的数据,详见表1。选取臼杯表面结点,按上述力加载。
表1 各步态事件周期占比及不同步速下的髋关节力
3 结果
3.1 全足放平应力仿真结果
由图9可知,在全足放平阶段,股骨上的应力主要分布在股骨干的前外侧与后内侧,后内侧应力始终低于前外侧应力。股骨应力由近端向远端应力逐渐增大,在下端约1/3处达到最大,而不同步速达到的最大值不同。当步速分别为0.51、0.61、0.77 m/s时,股骨的Mises应力最大值分别为13.6、16.3和17.9 MPa。步速由0.51 m/s增加到0.61 m/s,最大应力值增长了19.9%,步速由0.61 m/s增加到0.77 m/s,最大应力值增长了9.8%。
3.2 站立中相应力仿真结果
如图10所示,在站立中相阶段,不同步速下的股骨应力分布模式相似,股骨的应力主要分布在股骨干的内外两侧,股骨整体应力由近端向远端应力逐渐增大,在下端约1/3处达到最大,股骨的应力水平较全足放平阶段有所下降。当步速分别为0.51、0.61、0.77 m/s时,股骨的Mises应力最大值分别为10.84、10.61、9.79 MPa,整体应力值差幅在2.2%~8.4%之间。

图9 全足放平时不同步速的股骨应力云图
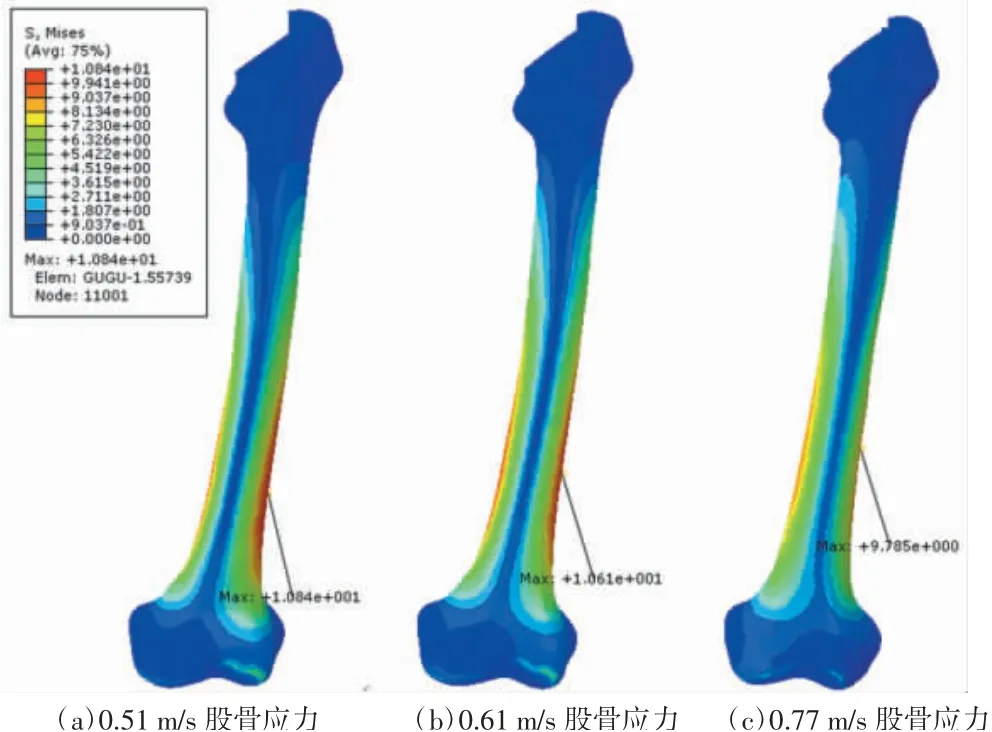
图10 站立中相时不同步速的股骨应力云图
3.3 加速推离应力仿真结果
如图11所示,在加速推离阶段,股骨应力的分布与全足放平时的情况相似,只是应力集中的位置向外侧偏移,同样股骨的应力由近端到远端逐渐增大,在距底端1/3处达到最大。当步速分别为0.51、0.61和0.77 m/s时,股骨的Mises应力最大值分别为3.3、7.4和17.6 MPa,应力呈倍数增长,随着步速的增大,股骨应力显著增加。
3.4 摆动中相应力仿真结果
如图12所示,在摆动中相阶段,不同步速下的股骨应力分布模式大致相似,主要分布在股骨干下端前外侧,在股骨远端处应力值达到最大。当步速分别为0.51、0.61、0.77 m/s时,股骨的Mises应力最大值分别为1.459、1.509、1.157 MPa,整体股骨应力较低,应力差幅为0.05~0.352 MPa。

图11 加速推离时不同步速的股骨应力云图

图12 摆动中相时不同步速的股骨应力云图
4 结论
根据有限元仿真结果,在整个步态期间,股骨的应力分布模式大致相似,都主要分布在股骨干的内外两侧,且由股骨近端向远端其应力逐渐增大,在中下部时达到最大,这与前期学者所做的仿真结果相吻合[17-19]。由图13不同步速下各步态事件的股骨应力峰值折线图可知,在站立中相、摆动中相阶段,随着步速的变化,股骨应力变化很小,维持在一个较稳定的水平。在全足放平阶段,随着步速的增大,股骨应力增大,增幅分别为19.9%和9.8%。在加速推离阶段,股骨应力峰值随步速的增加显著增大,当步速由0.51 m/s增加到0.77 m/s时,股骨应力峰值由3.3 MPa增加到了17.6 MPa,增长了4.33倍,考虑与步速增加时需要更大的肌肉推力有关。由此说明步速对站立支撑时的股骨应力影响不大,但在加速推离时,股骨应力峰值随步速增大呈倍数增加,这大大降低了植入物的稳定性,因此建议置换患者在术后应尽量减慢行走速度。

图13 不同步速下各步态事件的股骨应力峰值
5 讨论
本研究根据老年髋关节置换患者的不同步行速度,利用人体动力学软件LifeMOD依次进行0.51 m/s(慢速)、0.61 m/s(中速)、0.77 m/s(快速)步速的步态仿真,并将得出的髋关节力学条件作为有限元仿真中的边界条件进行加载,研究步速对髋关节置换后股骨应力的影响,采用将人体动力学分析与有限元仿真分析相结合的方法,保证了仿真结果的准确性,同时具有一定的创新性。
由于在使用人体动力学软件LifeMOD进行步态仿真时只获得了髋、膝、踝等关节的具体受力情况,并未考虑各个具体的关节软组织及肌肉、韧带的作用,而在真实的人体结构中,髋关节及股骨周围存在大量的肌肉、韧带等,都会对股骨的受力产生影响[20];由于行走时各肌肉力的大小方向会随着时间不断变化,若要在有限元分析过程中做到每个肌肉力在任何时刻的精确加载是很困难的。本文出于简化的目的,不计算肌肉力的作用,同时考虑到所有肌肉力最后都通过关节传递载荷,而不同肌肉附着点只改变局部骨的力学状态,因此从关节受力条件分析股骨力学行为是可行的。
另外,在进行步态仿真时,通过将步态周期划分为具体的连续不断的步态事件,逐次分析不同步速对每个步态事件下的股骨应力的影响[21],但是本研究只考虑了全足放平、站立中相、加速推离、摆动中相4个阶段。而对于仿真步速的选择,只选择了可以大致代表不同步速情况的数值,对于其他步速时不同步速对步态下所有阶段的研究以及行走时肌肉、韧带的作用将是今后研究的方向。