一种基于精细极化目标分解的舰船箔条云识别方法
2021-03-04全斯农代大海肖顺平王雪松
全斯农 范 晖*② 代大海 王 威 肖顺平 王雪松
①(国防科技大学电子科学学院电子信息系统复杂环境效应国家重点实验室 长沙 410073)
②(中南林业科技大学计算机与信息工程学院 长沙 410004)
③(国防科技大学电子科学学院 长沙 410073)
1 引言
由于箔条与电磁波的谐振会产生很强的散射,箔条被广泛应用于对雷达的被动式干扰。如图1所示,释放与舰船目标具有相近尺寸和雷达散射截面积的箔条云,对舰船目标的有效识别造成了很大的干扰[1–4]。因此,如何抑制箔条云的干扰,并有效地识别舰船目标,是一个具有重大研究价值的军事问题。近年来,越来越多的雷达及探测器都具备了极化测量的能力。同时,由于极化回波能够将目标的散射机制进行完整的描述和有效的鉴别,目前极化技术与雷达系统相结合成为一个广受关注的重要方向[5–11]。
针对舰船目标与箔条云的识别问题,国内外学者对此展开了广泛的研究。Shao等人[12]在共极化与交叉极化比的基础上识别了舰船与箔条云。为进一步凸显极化比的差异,Shao等人[13]和Li等人[14]又分别提出了一种非线性的极化变换方法。对于加权箔条云,李金梁等人[15]在箔条云的极化统计特性的基础上实现了识别。然而,当雷达目标的主要散射机制不再是二次散射的时候,该方法不再适用。Tang等人[16]试图通过考虑极化-雷达散射截面积比以及相应的概率密度函数来解决识别问题,但其所涉及的分布假设过于简单和理想化。Yang等人[17]通过采用极化取向角投影的方法抑制箔条云的干扰,尽管这种方法不需要任何的先验信息,但是需要对干扰极化参数进行实时的估计。Cui等人[18]利用雷达回波极化率来识别箔条干扰,但是由于该方法只利用和考虑了仿真数据与单极化信息,其鲁棒性并不强。为了进一步利用极化比信息,Hu等人[19]利用相应的反切角来鉴别箔条云和舰船,但这种方法对箔条云的随机方位角很敏感。

图1 真实场景中从舰船上释放的箔条云(图片来源:百度)Fig.1 Chaff releasing from a ship in an actual scenario (Courtesy:Baidu)
为解决这些问题,本文提出一种基于精细化模型分解的散射贡献差特征和舰船识别方法。基于散射模型的分解方法(Model-Based Decomposition,MBD)由于易实现及可进行物理散射行为准确解译等特点,在极化SAR图像判读领域被广泛应用。本文的主要工作包括以下几方面:首先,结合3种精细化散射模型,提出一种基于精细散射模型的七成分分解法,准确地刻画了舰船目标复杂结构的散射特性。然后,为了凸显舰船目标与箔条云之间的散射差异,构造了一个散射贡献差特征。最后,通过将构造的散射贡献差特征与极化散射角特征结合,输入支持向量机[20]中实现了最终的识别。实验利用仿真和实测的极化雷达数据对所提方法进行了验证,结果表明本方法不仅易于操作且具有很高的识别率,可有效服务于舰船目标和箔条云的识别。
2 方法
2.1 精细化散射模型
在单站互易情况下,目标的相干矩阵可以表示为

α和β分别代表二次散射和表面散射的模型参数。而[T]OOD,[T]OD和[T]OQW分别为本文引入的旋转二面角(Obliquely Oriented Dihedral,OOD)散射模型[23,24],±45°偶极子(±45°Oriented Dipole,±45°OD)散射模型和±45° 1/4波长(±45°Oriented Quarter-Wave,±45°OQW)散射模型[25]。下文将对这3个模型展开详细介绍。fS,fD,fH,fV,fOOD,fOD和fOQW则是待求解模型对应的散射系数。
二面角作为舰船等人造目标最典型的结构,会产生很强的二次散射能量。然而,当雷达平台飞行方向与二面角之间的相对角度发生变化时,二次散射将不再主导,此时会产生很强的交叉散射能量[26–29]。传统MBD对这种情况没有进行合理的散射建模,因而无法准确地刻画舰船目标的散射特性。本文首先引入第1个精细化散射模型,即OOD散射模型来解决这个问题。OOD散射模型是依据实际中旋转二面角后向散射,通过分析交叉极化成分与同极化成分的相对大小推导而来的,其典型特征在于模型T33项要显著大于T22项,且其它矩阵元素为0,具体而言,其表达形式为

ξ是一个无限小的正整数,以确保分母不为0。FOOD代表修正因子,它能够显著凸显旋转二面角的极化散射特性[30]。值得注意的是,FOOD由矩阵特征值组合而来,它具有旋转不变的特点。相较于经典的交叉散射模型,OOD散射模型可以更加准确地将由旋转二面角结构所产生的交叉极化成分从总的交叉极化成分中分离出来,因而对旋转二面角的建模更加准确和贴近实际[24]。
另外,在舰船等人造目标散射的场景中,相干矩阵并不满足反射对称特性。这一点从相干矩阵中T13项的实部和虚部都不为0中可以直观地反映出来。然而,在传统的MBD中,T13项通常被直接忽略,这样就会使得目标散射强行服从反射对称特性,从而造成极化信息的丢失。因此,为了进一步利用极化信息并且降低反射对称性假设的约束,在目标分解方法中,T13项应该以某种散射模型的形式进行释义。鉴于此,在本文所提分解方法中再额外融入两个精细化散射模型,即±45°OD散射模型和±45°OQW散射模型。
根据文献[25],±45°OD和±45°OQW散射模型是根据位于不同方位和不同距离的偶极子的组合得来的。具体而言,±45°OD和±45°OQW散射模型的相干矩阵可以由它们各自的散射矩阵的Pauli 矢量内积得到,即

符号vec(·)和上标H分别代表矢量化操作和共轭转秩。[S]代表Sinclair矩阵,是由位于不同方位和不同距离的偶极子的Sinclair矩阵求和得来的。在传统MBD中,由于散射模型与输入数据无法完全匹配,通常将±45°OD和±45°OQW散射当作残余量并直接忽略。但实际上,这两种散射真实产生于舰船等人造目标的局部结构之中。图2针对舰船目标的散射进行了分析。一般来说,表面散射(由甲板所产生)或二次散射(由舰船-海面或舰船船体本身形成的二面角所产生)是舰船目标最显著的散射机理,同时还存在螺旋体散射和OOD散射。值得注意的是,舰船上由塔台、天线和护栏等类似于偶极子结构的复杂局部结构会明显产生±45°OD和±45°OQW散射,这说明本文方法引入±45°OD和±45°OQW散射模型可以更加精细地刻画舰船目标的散射特性。此外,除了螺旋体散射,OOD散射、±45°OD散射和±45°OQW散射这些在分解过程中已经被考虑进去的散射成分,舰船目标上不同结构之间还会产生多重交互散射,这些多重交互散射共同形成了舰船目标的“体散射”。
2.2 基于精细散射模型的七成分分解
依据式(2)以及2.1节中的7种散射模型,可以得到如式(7)的方程组
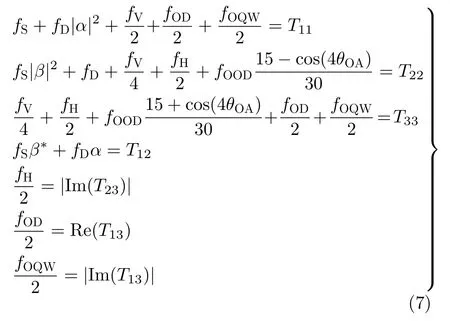
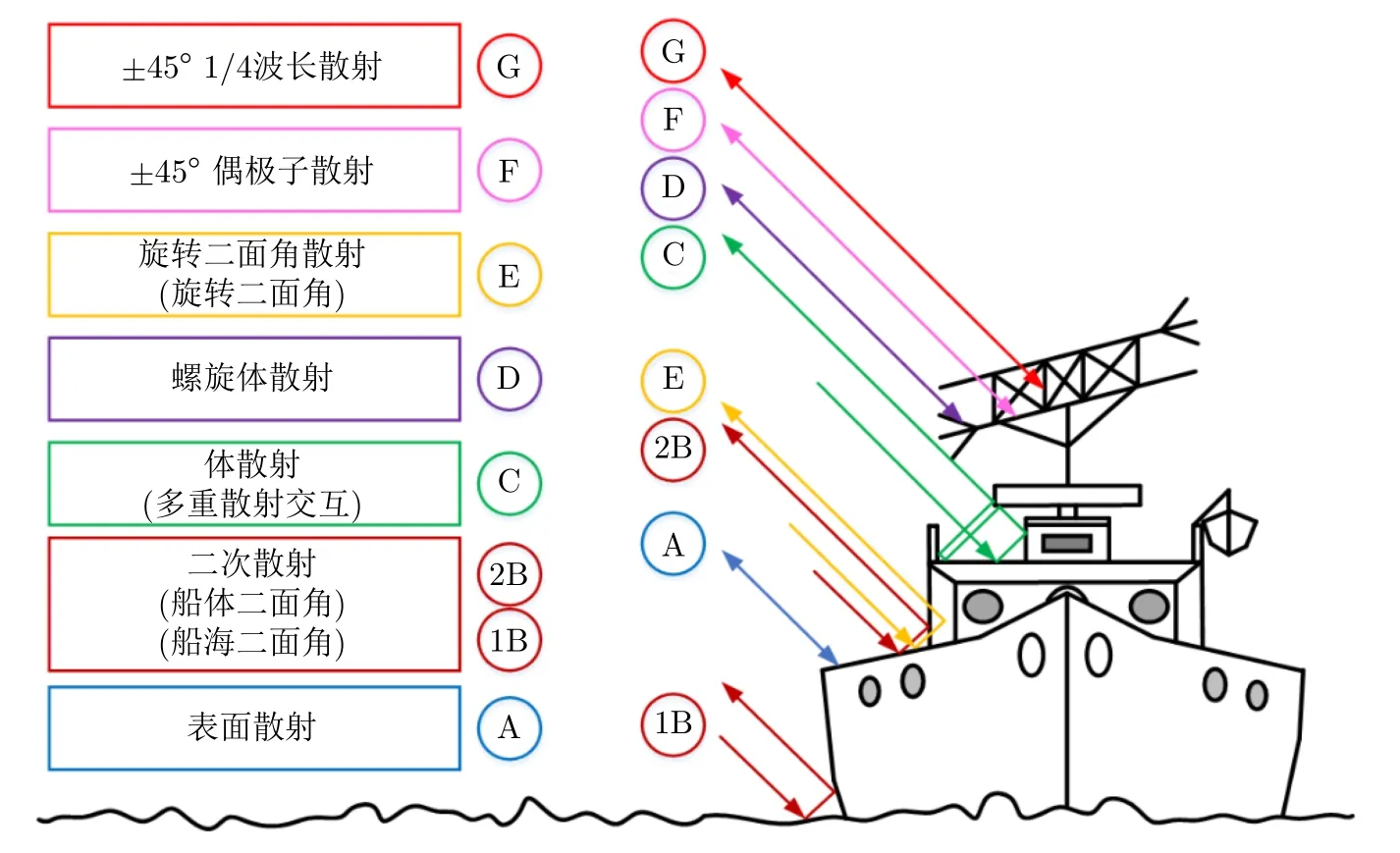
图2 舰船目标散射成分分析Fig.2 Various scattering occurred in a ship
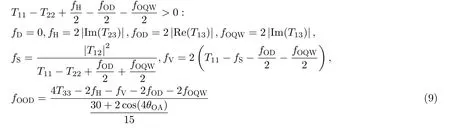
可以看到,式(7)中的方程组具有7个等式,但却包含有9个未知数。为了求解这一欠定问题,需要对模型参数取值做出一定的预设。根据T11−T22+fH/2−fOD/2−fOQW/2的符号,可以预先判定一个未知数的取值[28,29]。如果T11−T22+fH/2−fOD/2−fOQW/2>0,那么残余矩阵(从原始相干矩阵中减去螺旋体,±45°OD和±45°OQW散射)中的主要散射成分被判定为表面散射,在这种情况下fD=0。否则,残余矩阵中的主要散射成分被判定为二次散射,在这种情况下fS=0。这样处理之后的方程组虽然比之前更加紧凑,但还是很难得到最终的解析结果。考虑到这一点,对方程组中第2个和第3个方程进行重新整理并简化,得到结果为

更进一步地,相对比其它项来说,由于fOOD和 cos(4θOA)/15都很小,fOODcos(4θOA)/15这一项可以忽略。在这种情况下,fS和fD可以根据T12项直接求得。一旦表面散射或二次散射系数确定,就可以相应地由下列表达式求得其余的散射系数
或

最终,表面散射、二次散射、体散射、螺旋体散射、交叉散射、±45°OD散射和±45°OQW散射分量可以由式(11)确定

2.3 极化识别特征构造
为了达到最佳的干扰效果,通常将单个箔条的长度设计为雷达波长的1/2[12–14]。在这种情况下,可以将箔条等效为一个偶极子,因此箔条云的主导散射机制是体散射。然而,对于舰船目标来说,由七成分目标分解方法解译得到的主导散射机制一般为表面散射或二次散射,这是因为舰船目标主要是由平板(甲板)和二面角结构(由船舷侧面-海洋表面和甲板-舱口形成)所构成。因此,体散射成分可以作为识别舰船目标和箔条云的一个极化特征。
另外,箔条云本质上是方向随机分布的偶极子的集合,因而通常满足反射对称性。在这种情况下,对箔条云来说,七成分分解方法中的其他复杂结构散射(螺旋体散射、交叉散射、±45°OD散射和±45°OQW散射之和)可忽略不计。与此相反,舰船目标由于存在结构复杂的局部结构,通常会产生相当大的复杂结构散射。因此,为了更加明显地突出两者的散射差异,本文提出如式(12)的基于精细极化分解的散射贡献差特征

SPAN代表极化总功率,它可将DFMP的值限定在0~1。可以看到,对箔条云来说,从PV中减去PCOMP对DFMP的取值几乎没有影响,因此DFMP的取值较大。而对于舰船目标,从PV中减去PCOMP会使得DFMP的取值非常低。这样,就可以很好地实现舰船目标和箔条云的识别。
为了充分利用极化信息,本文进一步考虑极化散射角θPS这一识别特征。极化散射角是从极化自由度m衍生得来的,它是在三角函数变换的基础上,利用相干矩阵对角元素之差及之和推导得来的,其表达式为[11]
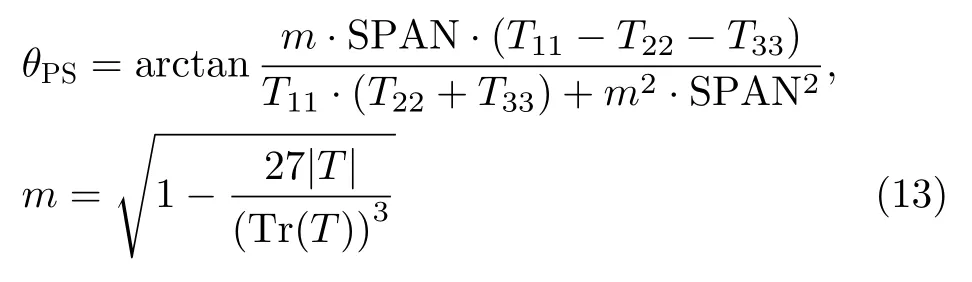
极化散射角取值在–45°~45°,且满足旋转不变的特性。根据文献[30],当极化散射角等于–45°时,目标散射对应的结构为二面角。当极化散射角等于0时,目标散射对应的结构为偶极子。当极化散射角等于45°时,目标散射对应的结构为三面角。由于箔条云的主导散射类型为偶极子散射,其极化散射角应稳定在0°附近。而对于舰船目标,由于其主导的散射类型不固定,其对应的极化散射角分布在–45°~45°。由此,可以利用极化散射角这一特征来进一步提升分类性能。
2.4 基于支持向量机的舰船箔条云识别
利用前文所构造的极化识别特征,本节采用支持向量机(Support Vector Machine,SVM)[20]来实现对舰船目标和箔条云的识别,SVM是一个用来解决两类目标识别问题的分类工具。在SVM中,使用最多的是线性分类器,其分类可通过预测每一个输入成分的类别来实现。另一种更精确的定义是SVM内部有一个超平面,从而可以在多维空间内对所有输入对象进行分类。距离分类边缘最近的点称为支持向量。通过将支持向量的边缘最大化,可以找到两类目标之间的最佳分离超平面。通常,很难用一个线性的超平面来区分两类目标,因此本节使用了高斯径向基核函数来将初始的特征集(散射贡献差,极化散射角)映射到一个更高维的空间,从而可以线性地区分转变后的特征集。与传统的线性SVM分类器相比,带有高斯径向基核函数的SVM分类器具有很强的泛化能力,很快的收敛速率,且只需要很少的训练样本就可以获得很好的训练效果[20]。
在本文方法中,基于高斯径向基的SVM识别方法包括以下5个步骤:(1)收集训练数据;(2)构建特征和特征向量;(3)通过训练数据进行机器学习;(4)获得SVM模型;(5)通过SVM模型进行分类并测试数据。图3是上述基于SVM的舰船识别方法流程图。
3 实验结果
3.1 实验数据
类似于文献[25],本文采用仿真极化雷达数据对箔条云散射进行分析,并对箔条云在3种典型分布的情况下进行了实验:第1种情况,箔条云的方位角服从均匀分布,天顶角服从正弦分布;第2种情况,箔条云的方位角服从均匀分布,天顶角按照特定的间隔分布;第3种情况,箔条云的方位角服从均匀分布,天顶角服从正态分布(情况3-1中心位于20°,情况3-2中心位于90°)[31]。在仿真实验中,设全极化SAR采用前斜视成像模式,极化方式为水平垂直极化。全极化前斜视SAR的仿真参数设定如表1所示。仿真中,为了与舰船目标的尺寸相当,假设20000根箔条分布在一个边长为30 m的正方体内,经过120 s后,3类典型分布箔条云的全极化前斜视SAR成像结果如图4(a)—图4(d)所示。由于篇幅所限,只展示了HH通道的强度图像。

图3 基于支持向量机的舰船识别流程图Fig.3 The flowchart of ship recognition based on the support vector machine
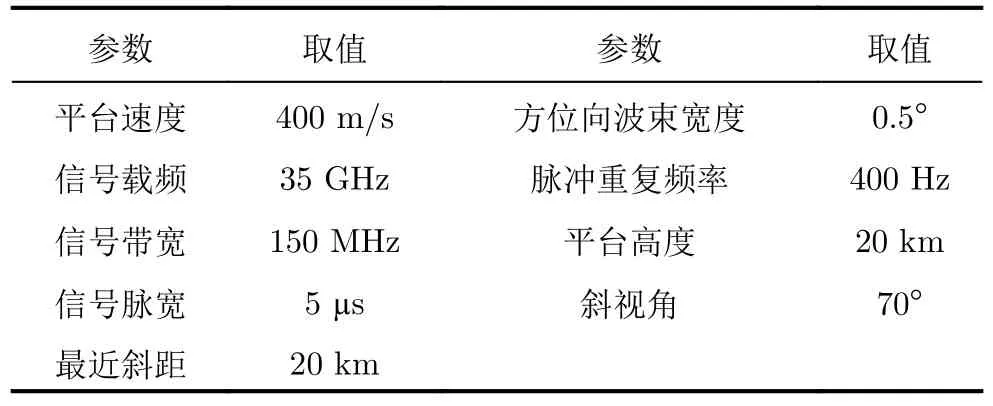
表1 全极化SAR仿真系数Tab.1 Fully polarized SAR simulation parameter
对于舰船目标,本文利用Radarsat-2星载实测全极化雷达数据进行实验分析,其成像地点为加拿大温哥华某一港口区域,其中方位向和距离向分别进行2视和1视处理,最后获得了4.87×4.73 m的分辨率。图4(e)展示的是Radarsat-2 C波段Pauli伪彩色图像(1693×1501 像素),其中,7个舰船目标(T1—T7)已用红色矩形进行了标记。
3.2 七成分分解结果
利用提出的七成分分解方法,可以得到如图5所示的箔条云伪彩色合成结果。其中第1行红色、绿色以及蓝色通道分别代表分解求得的二次散射、体散射以及表面散射贡献,第2行则代表依据散射贡献的相对大小解译得到的主导散射机制。例如,若体散射占主导,则该散射点颜色被标记为[0,1,0]。根据定性和定量的结果可以观察到,除了个别散射点表面散射或二次散射占主导以外,几乎所有的箔条云都呈现出很强且主导的体散射。另外,如表2所示,对于复杂结构散射,除了情况1占到了很小一部分比例(2.9%)以外,其他3种情况中都可忽略不计(且其中主要是螺旋体散射)。以上结果表明本文所提七成分分解方法可以准确地刻画箔条云的散射特性。
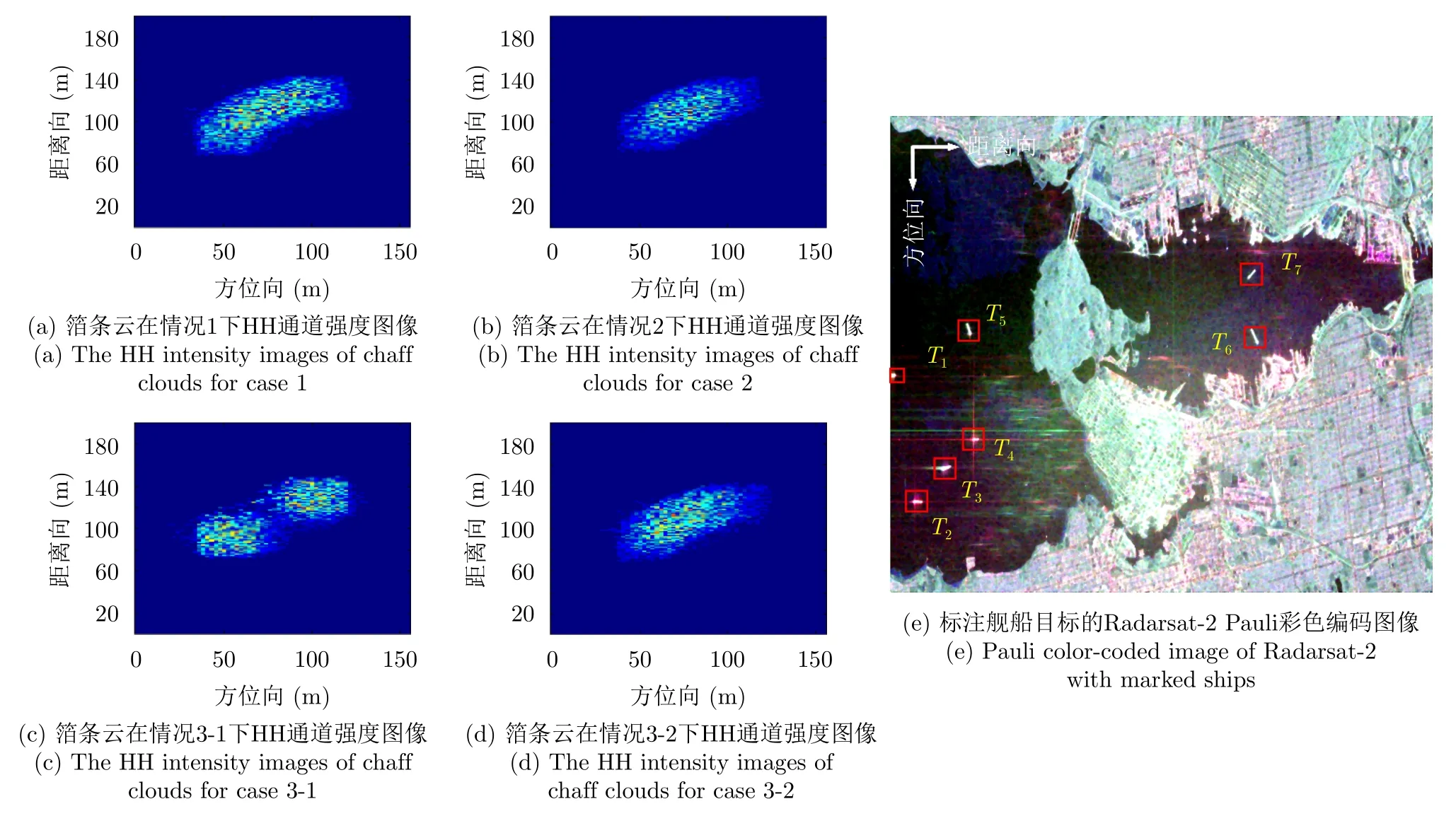
图4 箔条云仿真数据和舰船目标实测极化雷达数据Fig.4 Simulated and real polarimetric radar data of chaff clouds and ships
图5 箔条云在不同情况下的分解结果Fig.5 Decomposition results for chaff clouds in different cases
表2 箔条云散射成分统计结果(%)Tab.2 Scattering contribution statistics for chaff clouds(%)
图6第1行到第7行则分别对应舰船目标T1—T7的分解结果,其中第1列红色、绿色以及蓝色通道分别代表分解求得的舰船目标散射(二次散射与复杂结构散射之和)、体散射以及表面散射贡献,第2行则代表依据散射贡献的相对大小解译得到的主导散射机制,第3列代表复杂结构散射成分,且颜色越深,散射贡献越大。表3给出了舰船目标归一化后的散射成分贡献统计结果。
可以看到,舰船目标T1—T5的主导散射机制是二次散射,而目标T6和T7的主导散射机制是表面散射。这一观察结果是与实际情况相符合的,因为正如前文所述,舰船目标主要是由表面散射体或二次散射体所构成的。具体来说,对于目标T1,T2和T4,它们的二面角结构摆向与雷达平台飞行方向之间几乎没有角度的偏移。在这种情况下,可以认为它们都是反射对称的,从而产生了很强的二次散射贡献(分别为83.56%,84.71%和 95.30%),且复杂结构散射贡献非常微弱。对于其他的舰船目标,由于船体方向与雷达平台飞行方向不平行,其散射不再具有反射对称性,在这种情况下会产生显著的交叉极化能量。根据第3列可以看到,在舰船目标的不同位置局部地呈现出复杂结构散射。这些是由舰船目标上特定的局部结构产生的。另外,可以观察到目标T5,T6和T7的体散射成分很强(分别为23.83%,30.17%以及33.07%),这主要归因于这些目标上不同结构之间存在明显的多重散射交互。根据以上分解结果,可以得出如下推论:通常,箔条云的散射贡献差值大于0.6,而舰船目标的散射贡献差值小于0.15。因此,本文所构造的散射贡献差特征可以很好地用来对舰船目标和箔条云进行识别。
3.3 舰船箔条云识别性能分析
为了充分考虑极化散射信息,本文利用了极化散射角来提高识别性能。图7和图8分别给出了箔条云和舰船目标的极化散射角分布直方图。通过观察发现,对于不同分布情况的箔条云,极化散射角的取值基本都稳定在0°。但对于舰船目标,除了目标T1,T2和T4(它们的极化散射角值在–45°~0°)以外,其它舰船目标的极化散射角并不对应二面角结构,这与实际舰船目标结构的复杂性有关,这一结果也从另一方面验证了复杂结构散射模型对舰船目标散射特性刻画的有效性。
图9(a)给出了在散射贡献差-极化散射角二维平面上舰船目标和箔条云数据点的分布图,可以看到二者具有非常明显的分布差异,这说明在构造的平面内可以有效地将舰船目标与箔条云进行区分。利用构造的识别特征,利用通过训练获得的SVM模型可以实现对舰船目标和箔条云的识别。其中,训练数据集为所有舰船和箔条云数据点,测试数据集为每个舰船目标和箔条云数据点的平均值,即对舰船目标7个平均数据点即箔条云4个平均数据点进行分类。图9(b)给出了基于SVM的舰船目标及箔条云识别结果,其中空心圆圈代表支持向量。由于构造的极化特征具有良好的识别能力,利用SVM可以很容易得到清晰的识别曲线。而且,可以看到舰船目标7个平均数据点(蓝色星星)和箔条云4个平均数据点(红色矩形)都得到了正确的分类。为了定量地评估识别性能,实验中分别对舰船目标和箔条云正确与错误的识别点进行了计算。通过统计发现,在1838个舰船目标训练数据点中,只有24个训练数据点被误判为箔条云。而在5495个箔条云训练数据点中,只有13个训练数据点被误判为舰船目标。换句话说,舰船目标的正确识别率为98.69%,这说明本文所提识别方法可以正确有效地识别舰船目标与箔条云。
图7 箔条云极化散射角直方图Fig.7 Histograms of polarization scattering angle for chaff clouds
图8 舰船目标极化散射角分布直方图Fig.8 Histograms of polarization scattering for ships
4 讨论
为了证明本文所提极化识别特征的优越性,本节根据控制变量的思想设计了几种组合方法来进行讨论和比较。对箔条云散射而言,其中交叉极化分量要显著大于共极化分量,而对舰船目标而言,情况刚好相反,故而共极化与交叉极化分量的比值(极化比)是一个很好的识别特征[12],因此本节设计的第1个组合方法为:极化比、极化散射角和支持向量机的组合(表示为极化比-极化散射角-支持向量机)。另外,为了突出复杂结构散射贡献对构造特征的作用,将它从散射贡献差中移除而只保留体散射。此外,考虑到经典的泛化四成分分解方法[32]可以有效地改善人造目标的体散射过估问题,因而选择利用该方法中的体散射贡献作为识别特征。因此本节设计的第2个组合方法为:泛化体散射、极化散射角和支持向量机的组合(表示为泛化体散射+极化散射角+支持向量机)。图10给出了上述两种复合方法的识别结果。可以看到,对于极化比-极化散射角-支持向量机方法,舰船目标的极化比值覆盖了很大的范围,而箔条云的极化比值却只分布在一个很窄的区间内。尽管如此,还是有相当数量的舰船目标数据点被分类曲线划分到箔条云类别中,导致明显的误判。对于泛化体散射+极化散射角+支持向量机方法,它可以对舰船目标7个平均数据点和箔条云4个平均数据点进行正确的分类,因而识别性能要优于极化比-极化散射角-支持向量机方法,尽管分类曲线消除了更多的箔条云数据点,但它仍然存在明显的错分。
接下来利用4个评价指标,即正确识别率、漏检率、错误识别率和分类精度来对识别结果进行量化,相应的结果统计列于表4。从正确识别率、漏检率和分类精度这3个评估参数来看,本文方法要明显优于上述两种方法。由于错误识别率在各方法中都取值较小,因而它的影响可以忽略不计。根据上述实验结果可以发现,本文所提散射贡献差特征具有突出的识别优势。此外,复杂结构散射贡献对散射贡献差特征构造具有重要作用,通过对比泛化体散射可以看到,它可以将识别率提高4个百分点。
为了探讨本文方法中的两个识别特征对最终识别性能的影响,本节进一步设计了两种组合方法来进行比较:即散射贡献差-支持向量机方法和极化散射角-支持向量机方法。表4给出了两种方法相应的识别结果。通过对比评价指标取值可以看到,散射贡献差-支持向量机方法要明显优于极化散射角-支持向量机方法。尽管二者正确识别率、漏检率以及错误识别率相差很小,但分类精度的差异说明极化散射角-支持向量机方法无法满足正确分类要求。所以,本文所提出的散射贡献差特征对最终识别性能的改善影响更大,极化散射角则起到辅助作用。

图9 本文方法的识别结果Fig.9 Recognition results of the proposed method

图10 不同组合方法的识别结果Fig.10 SVM-based classification results of different composite methods

表4 不同组合方法定量识别性能(%)Tab.4 Quantitative recognition performance for different composite methods(%)
尽管本文方法易于操作,且对比现有其他方法具有明显优势,但它在实时雷达系统中的实现仍面临一定挑战。一方面,文中采用的箔条云数据是仿真数据,因此需要更多的实测数据来验证方法的有效性。另一方面,随着极化雷达系统成像分辨率的不断提高,相干散射与非相干散射在同一个分辨单元内共存,这将导致原有的散射模型失效。在这种情况下,为了准确地刻画舰船目标的散射特性,需要提出更加精细化的散射模型。
5 结论
在军事应用中,箔条云由于具备与舰船相近的尺寸和雷达散射截面积,是干扰舰船目标识别的一个主要障碍。鉴于此,本文从精细极化目标分解的角度提出了一种舰船目标箔条云识别方法。一方面,基于OOD散射模型,±45°OD散射和±45°OQW散射模型提出了一种精细化七成分分解方法,它能够准确地刻画舰船目标的散射特性。另一方面,为了凸显箔条云与舰船目标散射特性的差异,本文结合分解得到散射成分贡献构造了散射贡献差特征,并实现基于支持向量机的舰船目标识别。文中对影响识别性能的各个因素展开了充分的讨论。理论分析和实验结果都表明本文方法要明显优于当前已有舰船目标箔条云识别方法,且能达到最高98%的识别率。值得注意的是,实验中所采用的箔条云数据是通过仿真得到的数据。在实际中,可以使用从外场实验获取的极化数据进行离线训练,从而进一步提高识别能力和雷达系统的实时处理能力。