一种基于测地线距离的极化SAR图像快速超像素分割算法
2021-03-04邹焕新李美霖李润林秦先祥
邹焕新 李美霖 曹 旭 李润林 秦先祥
①(国防科技大学电子科学学院 长沙 410073)
②(空军工程大学信息与导航学院 西安 710077)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式微波成像传感器,在方位向与距离向上都具有较高的分辨率。并且,SAR具有全天候、全天时的工作能力,可以灵活地选择在不同波段、不同侧视角以及不同的极化组合状态下获取目标物的散射信息。而极化合成孔径雷达(Polarimetric Synthetic Aperture Radar,PolSAR)正是采用全极化方式,利用垂直(vertical)和水平(horizontal)的极化方式交替地发送与接收雷达信号,共具有4个通道,丰富的目标物散射信息在城市规划、土地利用、战场环境勘测等方面发挥了重要作用[1,2]。特别地,基于区域的极化SAR图像解译方法由于良好的抗噪性与高效性而受到了更多的关注,而超像素分割往往可以生成数量可控、形状规则且致密的区域,所以倍受青睐。
“我说后悔,你们就能放过我不成?”易平安无奈地反问,“是能让我直接当个锦衣卫百户,还是能让我脱下这身衣服去考个功名?”
超像素指的是一组具有相似颜色或其他低层特征的像素点集合,广泛应用于目标跟踪、变化检测以及图像分类等方面[3,4]。近年来涌现了较多的超像素分割算法,但这些算法大多是针对光学图像提出的,由于极化SAR图像与光学图像的数据描述不同且含有较多的相干斑噪声,传统的超像素分割方法直接运用于极化SAR图像时无法得到较好的分割结果。因此,一些学者针对极化SAR图像提出了相应的改进[5–7],大体可分为以下4类:(1)基于密度的超像素分割算法(density-based)。Lang等人[8]根据极化SAR图像的特性提出了广义均值漂移(Generalized Mean Shift,GMS)算法,而均值漂移(Mean Shift,MS)最大的特点是沿着密度上升方向寻找聚簇点,不断地将中心点移动到偏移均值位置,直到满足一定条件结束;之后,Lang等人[9]又将GMS算法改进后应用于极化SAR图像的超像素分割算法,提出了一种新的融合准则并引入预排序的方式提高超像素分割的精度,但该算法运算效率较差;(2)基于图的超像素分割算法(graph-based)。此类算法将图像作为一幅无向图,根据边的权值将图划分为超像素,色彩相似度或空间距离常被用来计算权重。常见的有归一化分割算法(Normalized cuts,Ncuts)[10]与熵率超像素分割算法(entropy rate superpixels)[11];(3)基于轮廓演变的超像素分割算法(contour evolution)。此类算法从初始的种子像素点开始演变形成轮廓以得到最终的超像素,代表算法主要有Turbopixels算法[12]与统计区域融合算法(Statistical Region Merging,SRM)[13]等;(4)基于聚类的超像素分割算法(clustering-based)。此类算法大多采用了聚类算法的原理,如k-means算法,同时以颜色信息、空间信息等作为距离度量。通常基于聚类的超像素分割算法能够得到数量可控、形状可控的超像素,这对于极化SAR图像是很重要的,更有利于极化SAR图像的后续解译过程。此类算法往往会引入后处理步骤以进一步提升分割精度,同时还拥有较高的运算效率。代表算法有基于简单线性迭代的超像素分割算法(Simple Linear Iterative Clustering,SLIC)[14]、基于线性谱聚类的超像素分割算法(Linear Spectral Clustering,LSC)[15]、基于迭代边缘精炼的超像素分割算法(Iterative Edge Refinement,IER)[16]等。
Feng等人[17]对SLIC算法的距离度量进行了改进,将原本的颜色空间的距离替换为Wishart距离,有效地改善了边缘贴合问题,但仍有部分不均匀异质区域出现误分割情况,且算法计算效率较低。Xiang等人[18]考虑到极化SAR图像的同质性问题对SLIC算法进行改进,并利用边缘检测器对图像边缘进行提取,较好地解决了极化SAR图像中混杂不均匀区域的分割问题,但是算法的欠分割误差以及运算效率有待进一步验证。Hou等人[19]则通过提取图像中的7种特征并计算欧氏距离得到像素点之间的相似度,结合多种特征确实能够有效地提升精度,但该算法所采取的方式大大降低了运算效率。张月等人[20]则提出了基于极化SAR图像的IER算法 (PolSAR Iterative Edge Refinement,POL-IER),用修正Wishart距离代替IER算法中CIELAB颜色空间的欧氏距离,对分割精度有一定的改善。虽然该算法采用了快速计算方法,但是,由于修正Wishart距离不能准确地计算两个像素点间的最短距离,其仍要进行多次基于复数矩阵的代数运算,因此,该算法的运算效率仍有进一步提升的空间。
面向极化SAR图像的超像素分割算法旨在降低相干斑噪声影响的同时提高极化SAR图像的解译效率,作为预处理环节,超像素分割的精度会直接影响后续的解译结果。而随着极化SAR系统的快速发展,未来势必会有海量的极化SAR图像需要进行解译处理,因此,作为预处理技术的超像素分割还应当具备较高的运算效率。Ratha等人[21,22]将基于单位球面上的测地线概念引入极化SAR图像中,由实对称Kennaugh矩阵导出数据点间的测地线距离,在保持准确度量最短距离的前提下还具有很高的运算效率,先后实现了变化检测与图像分类解译任务。
针对现有的极化SAR图像超像素分割算法存在的问题,为了良好地兼顾分割精度与运算效率,本文提出一种基于测地线距离的极化SAR图像快速超像素分割算法。首先,将输入图像初始化为多个正六边形,与IER算法的正方形初始化相比,在相同大小的搜索范围内为不稳定点重贴标签时可以减少距离计算次数,提升运算效率。考虑到极化SAR图像中的狭小细长区域,在正六边形超像素初始化的基础上,将所有像素点都初始化为不稳定点;之后,将测地线距离与空间距离进行加权为不稳定点重贴标签;然后,随着迭代不断地更新不稳定点集,直至满足终止条件;最后,采用基于测地线距离的不相似度度量算法进行分割后处理,进一步消除孤立像素点。本文的主要贡献如下:(1)将基于Kennaugh矩阵导出的测地线距离引入极化SAR图像超像素分割方法研究中;(2)将本文算法与其他4种较优的算法进行了大量的对比分析实验,本文算法不仅具有准确性与高效性,并且分割所得超像素形状规则,从而验证了本文算法的优越性。
2 算法描述
本文算法主要分为4个步骤,主要包括:(1)将输入图像初始化为多个正六边形,并设置所有像素点都为不稳定点;(2)将测地线距离与空间距离进行加权作为距离度量,为不稳定点重贴标签;(3)更新不稳定点集,直至完成迭代;(4)后处理。本文算法的框架流程如图1所示。
2.1 初始化
2.1.1 正六边形初始化
1.3.1 心肌病理组织学检测 将部分心肌组织石蜡包埋后制备切片,置于4%多聚甲醛溶液中固定24 h,苏木精-伊红(hematoxylin-eosin,HE)染色,光镜下观察心肌形态学变化,将非糖尿病ZT23亚组与糖尿病ZT23亚组、非糖尿病ZT11亚组与糖尿病ZT11亚组进行比较。
IER算法能够生成形状规则、边缘贴合良好的超像素,由于在局部聚类时只为不稳定点重贴标签,因此有较高的运算效率。但IER算法是面向光学图像的超像素分割算法,由于成像机理的差异,直接用于极化SAR图像时性能并不稳定。本文算法同样也只为不稳定点重贴标签,不稳定点定义为

其中,p和q是图像中的两个像素点,Nb(p)是p的邻域函数,本文实验中采用4邻域函数,t(i)表示i的标签,nt(i)表示一次迭代后i的新标签,i=p,q。
为了消除图像中的孤立细小区域,本文采用基于测地线距离的不相似度度量算法进行分割后处理[20]。当某超像素的尺寸小于阈值Nth=S2/4时,将计算该超像素与其8邻域超像素间的不相似度。若计算所得最小的不相似度值小于预设的阈值Gth,则将该超像素与相应的邻域融合,否则,移向下一个超像素执行上述步骤。超像素Ri与Rj之间的不相似度定义为
根据正六边形分布的几何特性,相邻六边形的水平与垂直距离分别为
治疗前,两组患者的UPDRS II和UPDRS III评分相比,差异无统计学意义;治疗后,两组患者UPDRS II和UPDRS III评分均显著降低,同组治疗前后比较差异有统计学意义(P<0.05);且观察组患者UPDRS II和UPDRS III评分显著低于对照组,差异有统计学意义(P<0.05),见表2。

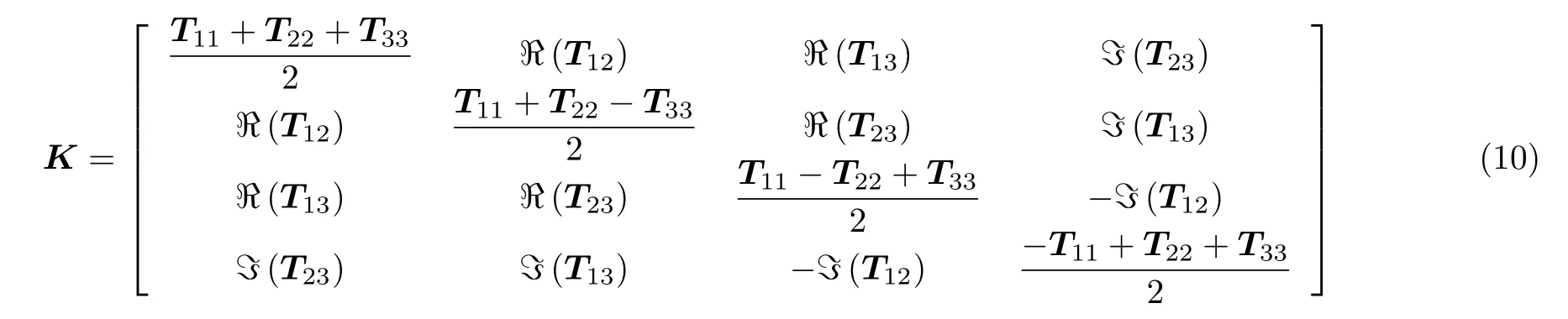
根据定义不难发现,Kennaugh矩阵是一个易于计算的实对称矩阵,同时保留了足够的后向散射信息,还具有尺度不变性。而极化SAR图像中的每一个像素点都可用一个Kennaugh矩阵表示,根据式(7),可得出两Kennaugh矩阵间的测地线距离为(证明过程详见文献[21])
总之,基于可靠性思维推出的状态监控借助于各种传感器、信号采集、信号处理和信息分析等技术和手段,对来自于汽车、发动机系统、设备、部件、组件与相关的外部数据或信号进行检测和观察,并通过人机对话判断汽车、发动机技术状态,制定决策,确定维修内容,这是一门综合性与工程技术实践与管理。
因此,对于一个不稳定点标签,最多需要计算9次加权距离,才可最终确定该不稳定点所属的超像素。当输入的极化SAR图像的像素数为N时,每一次聚类迭代的复杂度为9N。而图2(b)显示的不稳定点j,搜索范围为图中蓝色虚线所标注的矩形区域,区域大小同样为2S×2S。但在此搜索范围内,仅包含了6个初始化聚类中心点Cj0,Cj1,Cj2,Cj3,Cj5,Cj6。因此,与正方形分布相比,呈正六边形的分布在为不稳定点重贴标签时的复杂度仅为6N,针对一个像素点类别指派的运算复杂度最多可减少3N,大大地提高了算法的运算效率。同时,多边形在面对实测极化SAR图像复杂的不均匀地物分布情况下,可以更高效地对地物边缘进行贴合,在为所有像素点确定超像素标签的情况下减少重复计算的次数,提高运算效率。

图1 本文算法框架流程图Fig.1 The flowchart of the proposed method
2.1.2 初始化不稳定点集
如图3(a)所示,IER算法首先将各个超像素中心点置于正方形内,之后,将不稳定点集初始化为正方形的边缘像素点(图中红色区域)。光学图像大多形状规则,且包含的同质均匀区域较多,因此该不稳定点集初始化方法比较适用于光学图像,对于生成的超像素的边缘贴合度影响很小。但是,极化SAR图像中通常会包含很多小面积或细长的区域,实测数据往往地物分布也都比较复杂且包含较多的相干斑噪声。若面向极化SAR图像也只将不稳定点集初始化为正方形的边缘像素点,则不能为中心点Ci0周围的像素点进行重贴标签,而这些像素点有可能是某些细小区域的边缘部分,因此得到的超像素必然无法贴合到这些区域的边缘,这会造成边缘回调率降低,分割区域规则性变差,直接影响极化SAR图像的后续的目标检测、变化检测以及地物分类等解译过程。
超像素分割作为预处理环节,要能根据不同的需求生成不同数目的超像素,同时保证分割精度不受超像素数量的干扰。但是,实验结果发现将IER算法的初始化方法用于极化SAR图像时,无法得到边缘贴合良好的超像素分割结果,且初始化边长值的变化与分割结果有较大程度的关联。这是由于极化SAR图像在初始化正方形的中间位置可能存在很多真实的边缘像素点,因此初始化正方形的边长越大,IER算法的初始化方法越容易忽略真实的边缘像素点,从而导致了误差的出现。

图2 正六边形初始化示意图Fig.2 Distribution of cluster centers
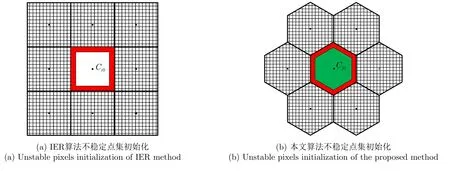
图3 两种初始化方法的示意图Fig.3 The sketch map of unstable pixels initialization of two methods
针对上述存在的问题,本文将不稳定点集初始化为所有的像素点,如图3(b)中所示的红色、绿色区域以及初始化聚类中心点Cj0,充分考虑到极化SAR图像地物分布的特殊性,从初始化不稳定点集的角度来提升超像素分割的性能。POL-IER算法[20]原理当中也涉及将所有像素点初始化为不稳定点集,相较于仅将边缘像素点初始化为不稳定点,其边缘贴合度有所提升,但面对复杂的实测极化SAR图像的地物分布情况,其仍不能满足需求。而本文算法在基于六边形初始化的基础上将所有像素点均初始化为不稳定点,从而在对异质不均匀区域的分割能够更精细化,得到边缘更为贴合的超像素分割结果。
2.2 测地线距离
令M为拓扑空间,则函数γ:[0,1]→M可以理解为连接点γ(0)与γ(1)在M上的简单曲线,且γ(t1)γ(t2)对于所有的t ∈(0,1)。例如,平面中的直线段或者球体上的圆弧都是简单曲线。若满足局部的欧几里得性质,则M称为黎曼流形。由此,曲线便可以根据度量导出的长度进行比较。令点A与点B为黎曼流形上的两点,而F为从点A开始到点B终止的平滑(可微分)简单曲线族。则F中必然存在一条长度最小的曲线,这样的曲线便称为连接点A与点B的测地线(geodesic)。
对于在 R2上的点A与点B,连接两点间的直线段则为测地线,在R3中亦然。若在 R3中有一单位球,此时,直线将不是球面上的有效曲线。在这种曲线必须完全位于球面上的情况下,连接点A与点B的大圆弧段则为理想的测地线,大圆即为穿过点A和点B的半径为1的圆[23]。对于更高维的球面SN−1=
(3)基塘系统。澎溪河湿地自然保护区的实验区的生态恢复中运用了多功能基塘系统,经过多年的淹没考验,如今基塘结构依旧稳定,植物生长情况良好,系统生态服务功能高效,生态效益良好[21]。在三峡水库消落带实施的多功能基塘是应对季节性水位变化的一项生态工程尝试,它为消落带生态修复提供新途径的同时,也强调了生态系统结构和功能的整体性优化和生态系统服务功能持续性提升的思想。
此处,ρt(u)=u(τ-I(u<0)),其定义在Koenker和Bassett(1978)的研究中有详细说明;I(u)<0为示性函数,当{u<1}时该函数取1,否则取0。上述目标函数无法直接用微分求解,可以采用线性规划的办法求解得到估计值。分位数协整模型同样需要关注在分位数下的变量之间是否具有协整关系。Xiao(2009)基于累加和残差(cumsum residual)给出如下的检验统计量:
脑血管病变是一种危重度较高的、特殊类型的血管类疾病,临床表现多种多样,缺乏特异性,具有较高死亡率。有研究表明[3],随着16排CT的广泛使用,CTA也成为检查脑血管病变的常用手段,检出率与MRA差异不明显,但要面临辐射、造影剂有过敏及肾毒性风险,患者接受度差。相对于MRI检查,MRA具有的优势较多,无需应用对比剂,简便无创,成本低的优势。

大圆弧段依然是理想的测地线,而沿大圆测量的长度一般称为弧长距离。则SN−1单位球面上的A(x1,x2,···,xN)与B(y1,y2,···,yN)两点间的测地线距离可定义为[21]

其中,“·”代表在 RN空间中的标量点积。特别地,这种距离(或度量)概念也称为点A与点B之间的球面距离,对于任意维度的单位球面都适用。同样,测地线距离的这一概念也可以推广到极化SAR数据中。
极化SAR利用水平(horizontal)极化和垂直(vertical)极化交替地发送与接收雷达信号,一般用S矩阵来表示获取的目标物全极化信息[24]

这是一个2×2的复矩阵,每一个元素都包含了相应电磁散射信号的幅度和相位信息。其余的一些可以描述极化SAR散射信息的矩阵均能从S矩阵推导得出,常用的极化相干矩阵T便可通过多视处理得到。对于单基极化SAR,Kennaugh矩阵同样可以对极化信息进行描述。相干模式下,其能够通过式(9)的方式由S矩阵计算所得[25]
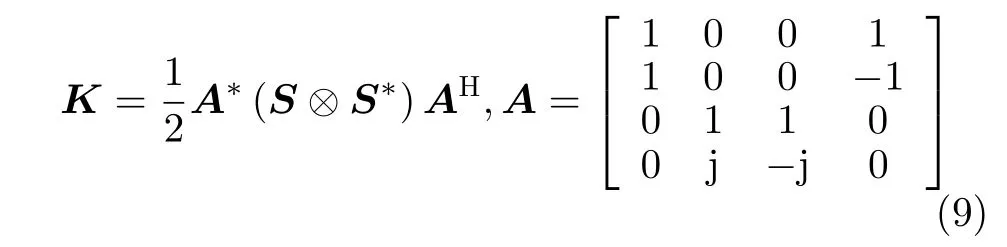
其中,⊗代表克罗内克积,。在非相干模式下,Kennaugh矩阵也可通过相干矩阵T计算所得[22]
联合式(2)—式(4),可分别求得水平间距Sh与垂直间距Sv为
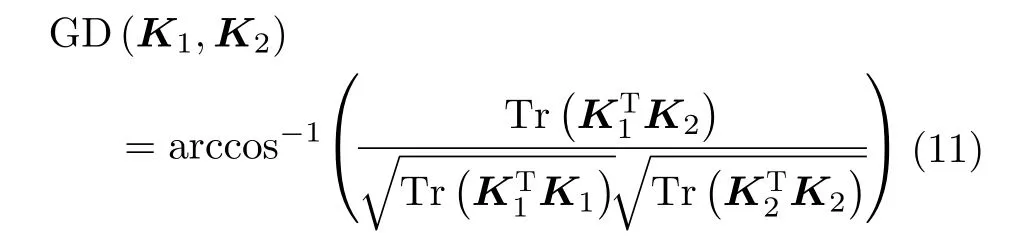
其中,Tr代 表矩阵的迹。观察式(11)可发现,两像素点间测地线距离的计算高效便捷,由于Kennaugh矩阵又含有充足的目标物散射信息,因此测地线距离可以准确地度量出两数据点间的最短距离。
2.3 面向极化SAR图像的快速超像素分割
考虑到极化SAR图像的空间邻域信息,本文采用测地线距离与空间距离的加权形式。同时,将空间距离引入距离度量中还可以更好地保持超像素的几何结构,并且降低噪声对超像素分割结果的影响。像素点i与第j个聚类Rj的中心像素点的空间距离为

因此,测地线距离与空间距离的加权距离如式(13)所示

其中,dGD(i,Rj)代表像素点i与第j个聚类Rj的中心像素点间的测地线距离,S为搜索范围边长值的1/2,m为紧致因子。
在《角的概念》的教学中,教师由学生熟悉的生活引入,唤醒学生对角的初步认知,接着,教师又让学生们摸角,直观感受角以及借助多媒体让学生辨别角等活动,都为学生积累了丰富的感性经验,接着,教师再借助合情推理帮助学生把感性经验上升到理性认识,既促进了学生对角的概念知识的建构,又使学生的逻辑思维能力得到了提升。
IER算法与POL-IER算法均将图像初始化为正方形(规则网格),每一个黑色实线轮廓的正方形即为初始的超像素。将初始化聚类中心置于正方形内,边长为S个像素点,点Ci0,Ci1,Ci2Ci3,Ci4,Ci5,Ci6,Ci7,Ci8即为初始的聚类中心,如图2(a)所示。图2(b)中的初始化超像素呈正六边形分布,其初始聚类中心为点Cj0,Cj1,Cj2,Cj3,Cj4,Cj5,超像素之间的水平间距为Sh个像素点,垂直间距为Sv个像素点。每一个黑色实线轮廓的正六边形即为初始的超像素。为了方便后续的对比,令初始化正方形超像素与正六边形超像素面积相同,则正方形的边长S与正六边形的边长H需满足式(2)的几何关系
为保证对比实验的公平性,本文选取POL-SLIC算法[17]、POL-LSC算法[15]、POL-IER算法、FHAWS算法与本文所提的FHAGS算法进行对比。5种算法的参数设置如下:POL-SLIC算法与POL-IER算法的紧致因子取值分别为1.2与1.4,POL-LSC算法的加权因子为0.2,FHAWS算法与FHAGS算法的紧致因子取值均为0.1。其中,POL-LSC算法为C代码与MATLAB代码混编实现,其余算法均为MATLAB代码实现。从图9(a)中可看出,POL-IER算法、FHAWS算法与本文所提FHAGS算法的BR均较高,始终位于折线图的上方。
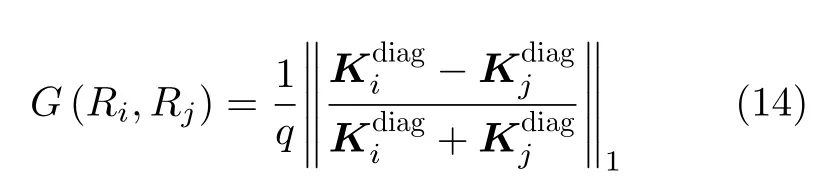
其中,Kdiag表示超像素的中心Kennaugh矩阵的对角线元素构成的向量。本文实验中Gth的取值主要参考了文献[26],即Gth=0.4。
由是,孟子将太史克的家内三伦予以改造与扩展,向上及于国家,向下及于社会,而以家为中心,整合三者为一体。
本文针对极化SAR图像的快速超像素分割算法基本步骤如下:
为了对比更加直观,对于某不稳定点,本文算法与IER算法在同样大小的搜索范围内进行超像素中心点的搜索,搜索范围的大小为2S×2S,之后再计算与搜索到的中心点的距离。对于正方形分布来说,如图2(a)中的像素点i,其中蓝色虚线所标注的矩形区域即为不稳定点i的 搜索范围2S×2S,9个初始聚类中心Ci0,Ci1,Ci2,Ci3,Ci4,Ci5,Ci6,Ci7,Ci8均在此搜索范围内。
步骤1 初始化。首先对输入图像进行IDAN滤波处理[27],滑窗大小为7;之后初始化为正六边形分布,基于此再将所有像素点初始化为不稳定点,并设置迭代索引iter=0。
步骤2 局部重贴标签。若iter≥itermax或不稳定点集为空,则跳转至步骤4。否则采用式(13)在2S×2S搜索范围寻找与当前不稳定点相似度最高的聚类中心点,并将该中心点的标签赋予当前不稳定点。
光电技术作为现代电子信息科学技术,检查光电电子和信号转换这些详细的知识,光电的运用与许多其他学科技术有着紧密的关联,例如,光学微电子等技术学科在电子信息科技区域通过对光电的探究,对有能量光子的探究和信息光子会被作为更加深刻了解的对象,进而加快我国电子信息技术的发展。
步骤3 迭代更新。更新超像素模型以及不稳定点集,令iter=iter+1,再返回步骤2。
步骤4 后处理。搜索面积小于Nth的超像素,按照式(14)计算不相似度,基于预设的合并准则将超像素与其邻域相融合。
考虑到本文算法是基于滤波(Filter)后的数据进行了正六边形(Hexagon)初始化、所有像素点(All-pixels)的不稳定点初始化,还采用了基于测地线(Geodesic)距离与空间(Spatial)距离的加权距离,故下文将本文算法称为FHAGS算法。
3 实验结果与分析
为了评估FHAGS算法的性能,将FHAGS算法与其他多种算法基于2幅仿真图像和1幅实测极化SAR图像进行了对比分析实验。本文采用的仿真极化SAR图像由逆变换法[28]生成,是两幅含有3个相同规则区域但是面积不同的图像,分别为400像素×400像素和500像素×500像素。图4(a)展示的是面积400像素×400像素的仿真图像,真值图如图4(b)所示。实测极化SAR图像为AirSAR拍摄的L波段4视极化SAR图像,拍摄地区位于Flevoland测试区,图像大小为750像素×1024像素,其Pauli-RGB图像如图5所示。为了定量地对超像素分割结果进行评估,本文采用边缘回调率(Boundary Recall,BR)、欠分割误差(Under-Segmentation Error,USE)、可达分割准确率(Achievable Segmentation Accuracy,ASA)[20]和运行时间(time) 4种常用的评价度量对实验结果进行对比分析。通常,当迭代次数为20时,不稳定点集基本为空,因此本文实验设置itermax=20。
本文实验部分的组织如下。首先,在3.1节基于仿真图像对正六边形初始化以及不稳定点集初始化的有效性进行讨论,其次对测地线距离与快速修正Wishart距离两种度量进行评估,之后与其他4种面向极化SAR图像的超像素分割算法进行对比实验;为了进一步验证本文算法的准确性与高效性,在3.2节基于实测极化SAR图像与其他4种算法进行对比实验,并对实验结果进行了全面的定性与定量评测。
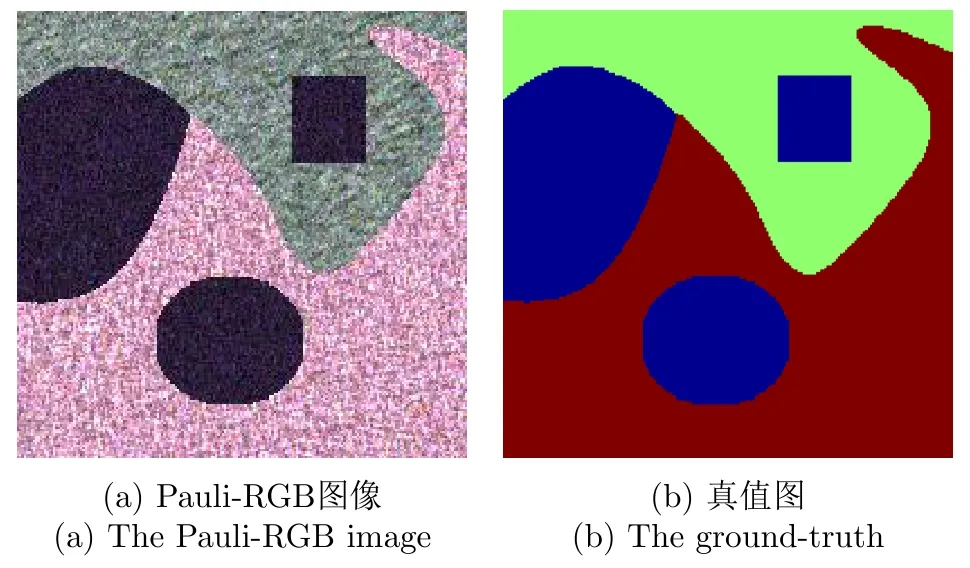
图4 仿真极化SAR图像Fig.4 The simulated PolSAR image
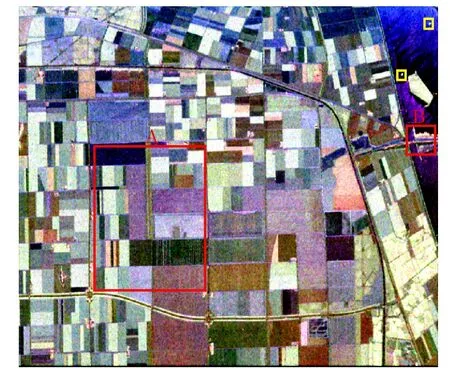
图5 Flevoland实测极化SAR数据的Pauli-RGB图像Fig.5 The Pauli-RGB image of the Flevoland real-world PolSAR data
3.1 基于仿真极化SAR图像的评估实验
3.1.1 初始化的有效性
FHAGS算法在初始化时首先将超像素初始化为正六边形,随后再将所有像素点均初始化为不稳定点。为了验证本文采取的初始化方式的有效性,采用正方形初始化与仅边缘像素点初始化(称其为FGS算法)、正六边形初始化与仅边缘像素点初始化(称其为FHGS算法)与FHAGS算法进行对比,基于上述两幅仿真极化SAR图像展开实验,以此来验证正六边形初始化、不稳定点集初始化对运算效率以及分割精度的影响。为保证实验结果的客观公正,紧致因子m均设为0.1(此数值时分割效果最佳)。基于边缘回调率、欠分割误差、可达分割准确率和运行时间的4个评价度量如图6所示,为方便搜索范围的确定,横坐标设置为搜索范围边长值的1/2S。
从图6(b)和图6(c)中可以看出,紫色折线与黄色折线基本交叠在一起,这表明引入了正六边形初始化后,没有引起超像素分割的不充分并且没有降低总体的分割准确率。图6(d)直观地表明了正六边形初始化可以显著地提升运算效率,FHGS算法与FHAGS算法的运算时长都低于FGS算法,特别是FHGS算法的运算效率要高于FGS算法约20%。由于初始化时将所有像素点全部初始化为了不稳定点,因此FHAGS算法的运算时长略高于FHGS算法。但图6(a)中则显示FHAGS算法的边缘贴合效果在3种算法中最佳,红色折线始终位于其他折线上方,且本文所提算法的分割精度基本不受S值的影响。
那一年暑假,我找来全套小学语文教材,包括人教社92大纲教材、2000年新修订大纲教材,课标实验人教版教材以及课标实验北师大版教材,一口气读完。经验告诉我,解读教材的能力是一个教师的核心竞争力。熟能生巧,没有熟读,就没有真正的文本细读,也就没有文本的教学解读;我尽量熟读课文,要求学生背的,自己要会背;不要求背的课文,也尽量背。解读教材,必须对教材进行梳理,包括对知识点、能力点、学习方法的梳理;对教材解读和梳理,是为了以简驭繁、深入浅出,这恰恰与教学对象“儿童”的特质相符合。
3.1.2 测地线距离的有效性
基于黎曼流形单位球面上的测地线概念引出的距离度量可以有效地计算两个像素点间的最短距离,为了充分验证本文所采用的测地线距离的优越性,将本文算法中的距离度量替换为快速修正Wishart距离与FHAGS算法进行对比,本文称其为FHAWS算法。同时,其余算法步骤保持不变,并保持参数的一致,紧致因子取值与3.1.1节相同。图7(b)、图7(c)中的折线直观地反映了采用测地线距离与快速修正Wishart距离均不会造成对图像的分割不充分,并能达到较高的总体分割精度。
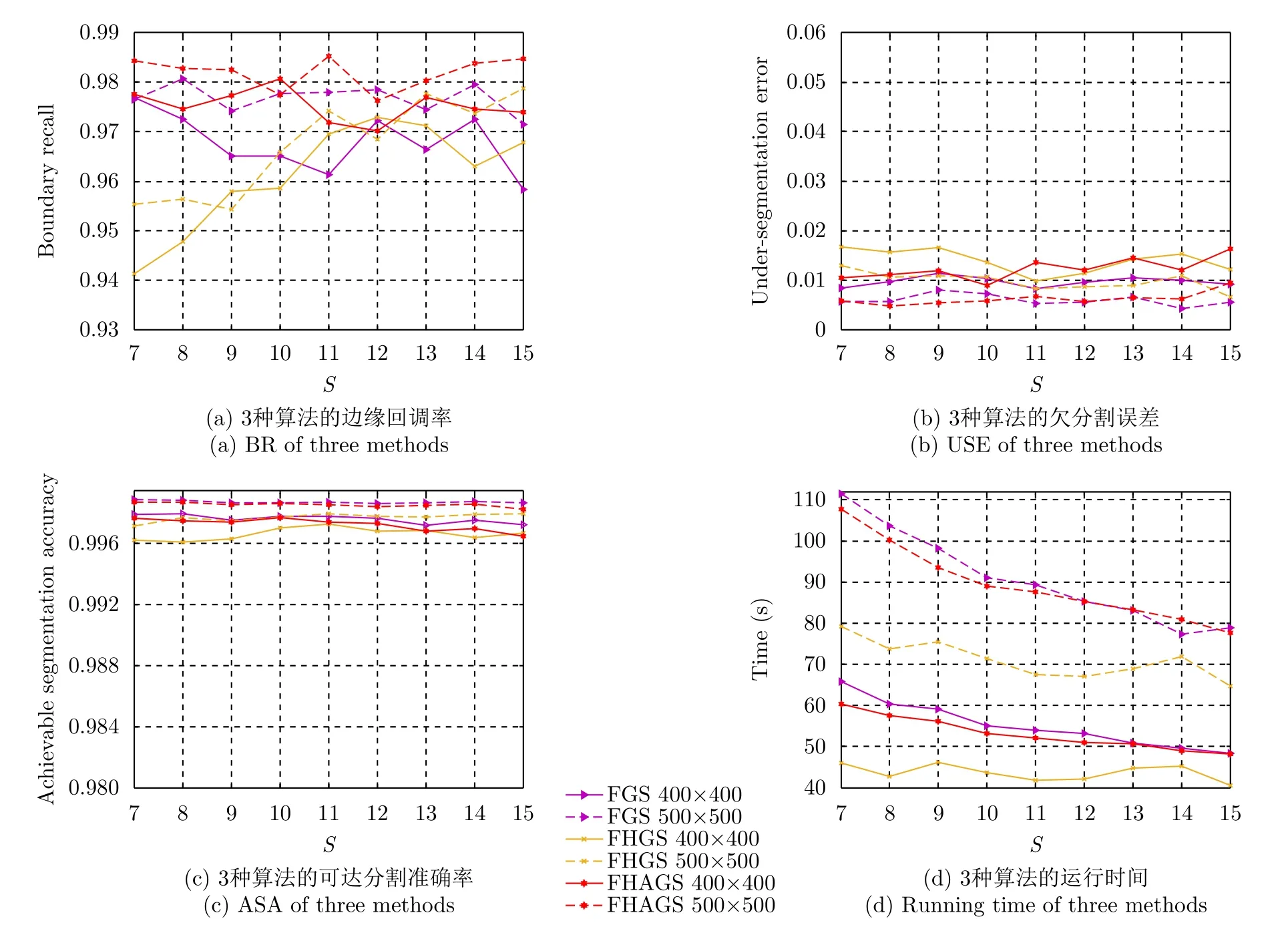
图6 基于不同初始化方法的实验结果Fig.6 The results of different initialization methods
值得注意的是,虽然FHAWS算法采用的是修正Wishart距离的快速计算方式,但在运算效率上还是远低于FHAGS算法,图7(d)显示本文采用测地线距离的运行时间比Wishart距离的运行时间可节省约1/3。从不稳定点与所有像素点个数比率图中也可看出,在每轮迭代时,基于测地线距离的算法不稳定点下降个数始终多于基于快速修正Wishart距离的算法,直观地解释了本文算法拥有较高的运算效率的原因。图7(a)则表明采用测地线距离与修正Wishart距离所得超像素分割结果均能够较好地贴合图像中的真实边缘。图8是FHAWS算法与FHAGS算法在S=10时的超像素分割结果图,图中红线所包络的区域即为分割所得超像素,而每一个超像素的颜色则为该超像素内所有像素点的平均颜色。虽然图7(a)中的蓝色折线略高于红色折线,但分割结果图清晰地表明采用修正Wishart距离在大片的同质区域分割效果很差,这样的分割结果可能会对后续的解译处理造成一定程度的误导,降低超像素分割作为预处理的意义。
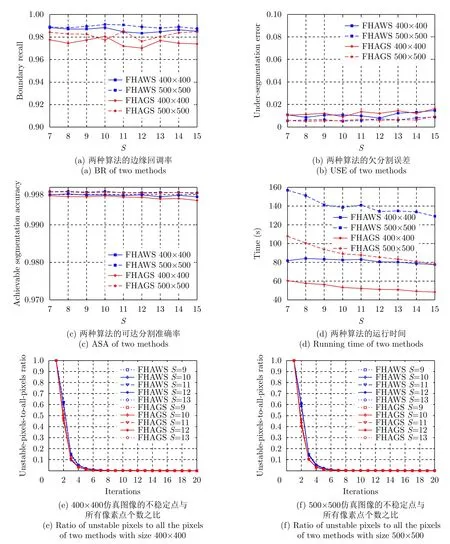
图7 基于两种不同距离度量方法的实验结果Fig.7 The results of two different distance measure
3.1.3 5种算法的对比实验
为顺利落实SAPP计划,津巴布韦政府已在2018年财政预算中把农业部门拨款由去年的7%增加至9%。其中包括资助在农业计划下将国内玉米产量扩大到22万公顷,这项玉米生产计划预计在2018年将耗资2.14亿美元用于提供农业投入,如种植种子、化肥和选定的农业化学品。
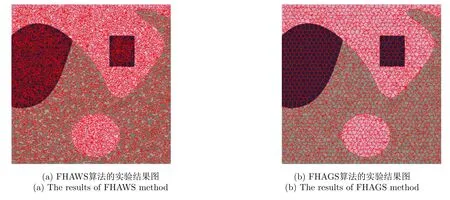
图8 FHAWS算法与FHAGS算法在S=10时的实验结果图Fig.8 The results of FHAWS method and FHAGS method with S=10
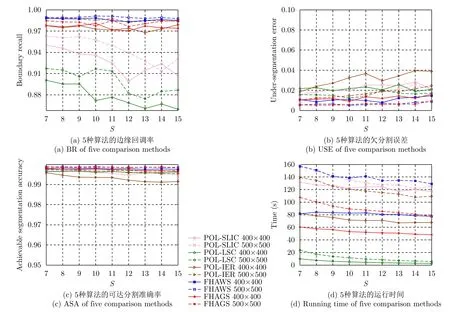
图9 5种算法基于仿真极化SAR图像的结果图Fig.9 The results of five comparison methods
从图9(b)和图9(c)中可看出5种算法的USE与ASA无较大差异,但折线图显示POL-IER算法的USE较高,这说明该算法存在的分割不充分情况较为严重。由于POL-LSC算法为C代码与MATLAB代码混编实现,因此运行时长最短,但由于分割精度太低,即使拥有较高的运算效率也无法满足超像素分割作为预处理的要求。而POL-SLIC算法则既没有较高的运算效率,同时分割精度也欠缺。在能够达到同样良好的边缘贴合效果下,本文所提FHAGS算法的运行时长最短,运算效率最优越,图9(d)中红色折线始终位于褐色、蓝色与粉色折线下方。基于仿真图像的实验充分的说明了FHAGS算法可以良好的兼顾分割精度与运算效率,满足极化SAR图像超像素分割的要求。
3.2 基于实测极化SAR图像的评估实验
本节基于Flevoland地区实测极化SAR图像,将本文算法、POL-SLIC算法、POL-LSC算法、POL-IER算法以及FHAWS算法共5种算法进行对比分析。在实验中S取值为6,POL-SLIC算法与POLIER算法的紧致因子取值分别为0.1与0.4,POL-LSC算法的加权因子为0.3,FHAWS算法与FHAGS算法的紧致因子取值均为0.03。图10为5种算法在该幅实测极化SAR图像上的超像素分割结果图。分割所得超像素即为图10中左侧列附加在Pauli-RGB图像上的红线所包络的区域,右侧列图则表示利用各超像素的平均颜色值重新赋予该超像素内所有像素点的颜色,便于与原图相比对观察分类结果。
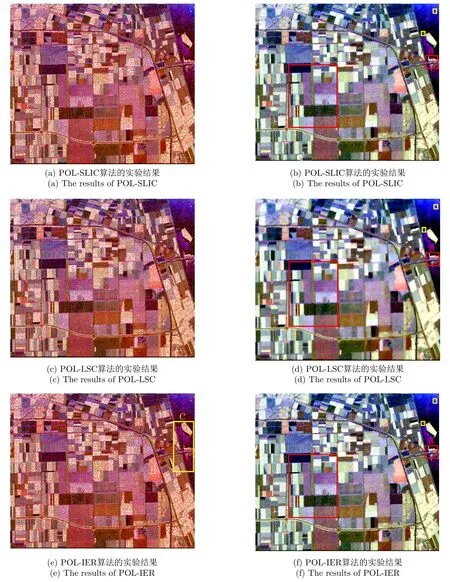
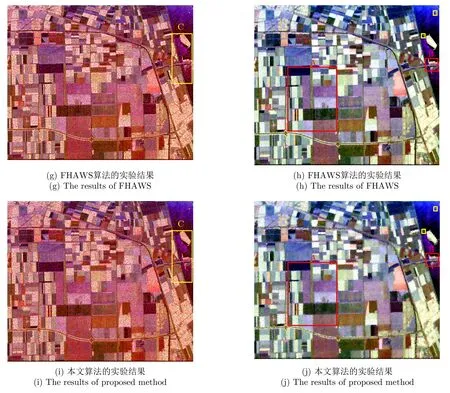
图10 5种算法的超像素分割结果图Fig.10 The generated superpixels of the five comparison methods
为了有效验证本文算法的性能,本节中选取图10中标注的红色区域A进行定量评测。区域A的分割结果如图11所示,虽然图11(a)、图11(b)中的边缘光滑但实际上并没有贴合到真实地物的边缘。从表1中的数据可以直观看出,POL-IER算法、FHAWS算法与本文算法的BR值均优于其他算法,且本文算法比POL-LSC算法的BR值高出0.1449,验证了本文算法在面向实测极化SAR图像时的分割优越性。观察图10(b)、图10(d)、图10(f)、图10(h)与图10(j)右上方的两处黄色标注框还可明显发现,POL-LSC算法与POL-SLIC算法无法保留图像中的强散射点,损失了部分细节信息,这样的超像素分割结果可能会严重影响后续的解译处理。虽然表1显示POL-IER算法与FHAWS算法的边缘回调率略高于FHAGS算法,但FHAGS算法的运行时间最短,能够在准确贴合边缘的同时拥有最高的运算效率。这是因为,相对于Wishart距离,测地线距离能够更为准确地度量两个像素点间的相似度,因此,能够为不稳定点赋予更准确的标签,快速减少下一次迭代时不稳定点的数量,从而提高计算效率。表2中的数据直观地反映了本文算法的高效性,FHAGS算法的运算时间与POL-SLIC算法、POL-IER算法以及FHAWS算法相比分别提升了39%,17%与14%,显著提升了运算效率且能够保持较高的分割精度,满足了超像素分割作为预处理技术所必需的高效性。
图12为图10中B区域的放大图,可以看出POLSLIC算法无法有效地贴合地物边缘,甚至破坏了地物原本的边缘;POL-LSC算法的分割结果边缘模糊,不能完整地保留地物边缘和细节信息。这样的超像素分割结果将会直接影响后续的解译处理,并且有可能使得解译精度大幅度下滑。观察图12中黄色标注框可知,只有本文所提的FHAGS算法生成的超像素具有较高的边缘贴合度,同时也更接近真实地物边缘。虽然图12中FHAGS算法的蓝色标注框区域与POL-IER算法、FHAWS算法相比,边缘贴合效果稍差,但FHAGS算法拥有最高的运算效率。为了直观地对比分割所得超像素的规则度,图13放大展示了图10中的区域C,图中叠加在Pauli-RGB图像上的红线即为超像素的边缘,且每个像素点的颜色由其所属超像素内平均颜色所替代。由于POL-SLIC算法与POL-LSC算法精度太低,因此主要针对其余3种算法进行超像素分割质量的对比。
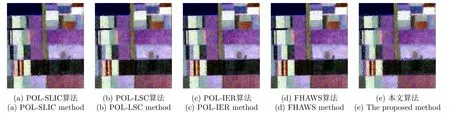
图11 图10标记区域A的放大图Fig.11 The enlarged superpixel results for region A of Fig.10
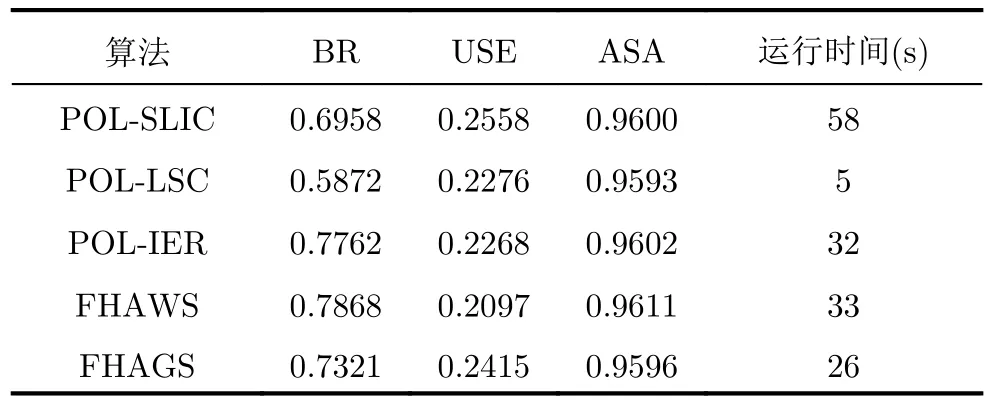
表1 5种算法基于区域A的4种评价度量Tab.1 Four criteria of five methods for the region A of the real-world PolSAR image
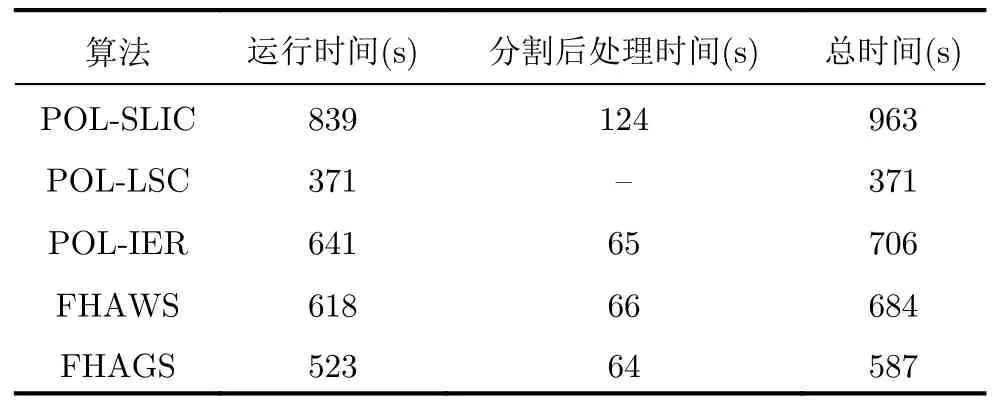
表2 针对实测极化SAR数据的5种超像素分割算法的运行时间Tab.2 Running Time(s) of five superpixel generation methods for the real-world PolSAR image

图12 图10标记区域B的放大图Fig.12 The enlarged superpixel results for region B of Fig.10
实验结果显示FHAWS算法在大块的同质区域分割性能较差且受相干斑噪声影响较大,因此,分割所得超像素的形状规则度较低。图13(b)显示POL-IER算法的分割规则度有较大的改善,但同样存在部分区域分割较差的情况,目视效果不佳。如图13(c)所示,本文算法的分割结果较其他2种算法更为理想,分割得到的超像素形状规则且边缘平滑,保留了图像的边缘细节,受相干斑噪声影响不大,不仅运行时间短还能保持较高的边缘贴合度,这对于极化SAR图像的超像素分割是非常重要的。
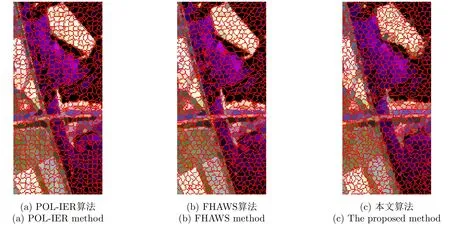
图13 图10标记区域C的实验结果图Fig.13 The superpixel results for region C of Fig.10
4 结束语
现有的大多数超像素分割算法都是面向光学图像提出的,没有考虑到极化SAR图像中固有的相干斑噪声的影响以及复杂的地物分布情况。虽然有很多学者针对极化SAR图像的特质对算法进行了相应的改进,但仍然无法在分割精度与运算效率之间达到良好的平衡。针对以上问题,本文提出了一种基于测地线距离的极化SAR图像快速超像素分割算法。为了减少在局部聚类时的距离计算次数,在初始化超像素时,本文算法将聚类中心置于正六边形内,与正方形初始化相比,可使得在相同大小的搜索范围内寻找到更少的初始聚类中心点,从而减少距离计算次数。考虑到极化SAR图像中细长区域的影响,在正六边形初始化基础上将所有像素点都初始化为不稳定点。在对不稳定点进行重贴标签时,采用实对称Kennaugh矩阵导出的测地线距离能够准确地衡量两个像素点之间的最短距离,因此可以更准确地为当前不稳定点赋予类别标签,快速减少连续两次迭代之间的不稳定点数量,从而提高了计算效率;迭代至满足终止条件后,采用了基于测地线距离的后处理步骤以消除孤立像素点。本文算法采用边缘回调率、欠分割误差、可达分割准确率与运行时间共4个度量参数对分割结果进行了定量与定性的对比评估分析。首先基于仿真图像评估了初始化方法的有效性,还通过与FHAWS算法对比验证了测地线距离的有效性;同时,基于仿真和实测图像将本文算法与其他4种算法进行对比实验,验证了本文算法分割性能的优越性。大量的实验结果表明,本文提出的算法能够得到形状规则且边缘贴合的超像素,并且能够有效提升运算效率,较好地兼顾了超像素分割的准确性与高效性,从而具有较高的实用价值。
实践证明,微信公众号不仅可以作为教师发布作业的端口,学生课后复习的资料库,还可以作为师生组织各种活动、分享各类英语文章的纽带。可以说,有了微信的辅助,不仅方便了老师的教学,学生的复习,还大大节省了上课的时间,为取得较好的教与学的效果提供保障。此外,借助此教学平台,老师与同学之间还可以随时留言互动,这不仅加深了学生对教学内容的理解,提高了学习效率,还增进了师生的感情,有利于教学质量的进一步提高。