基于拉曼激光雷达的大气水汽监测系统设计
2021-03-04闫子瑜杨延宁
闫子瑜,杨延宁
(延安大学 物理与电子信息学院,陕西 延安 716000)
0 引言
水汽是大气中变化最为活跃的气体成分,约占大气总体积的0.1%~3.0%,水汽的本质是呈现为气态的水,在相同温度和气压下,水汽的密度大约为干空气的0.622倍,因此大部分水汽集中在大气的低层[1]。相较于其他气体,水汽能够最先吸收来自地面的辐射,也能放射辐射,从而吸收或放出一定热量,对地面和空气的温度影响较大,所以了解大气水汽的变化情况和规律,对于人类的生产和生活具有重要意义。
目前监测大气水汽的主要方法有:GPS遥感监测、气象卫星监测以及激光雷达监测等。GPS遥感监测和气象卫星监测同时具有实时性较好的特点,但GPS的空间分辨率较差,气象卫星所能应用的地区有限制且成本较高,不能用于高精度且普遍的大气水汽监测[2-3]。相比较,激光雷达监测技术成熟,精度高且使用范围广泛,具有较好的实时性,更能满足大气水汽的监测需求。
因此,本文以拉曼激光雷达技术为基础,设计了基于拉曼激光雷达的大气水汽监测系统,对系统的硬件和软件进行详细设计,深入研究重要物理硬件和软件的工作流程、算法,对于提升大气监测的工作效率和准确性,促进拉曼激光雷达技术的发展具有重要作用。
1 系统结构及原理
为深入探究大气水汽的变化规律,本文设计的基于拉曼激光雷达的大气水汽监测系统的硬件部分主要由激光发射器、光电接收器以及信号处理器组成。软件部分设计了采集大气水汽信号、探测大气水汽散射光子数和回波光干数、计算大气水汽信噪比和占比5个程序。基于拉曼激光雷达的大气水汽监测系统结构如图1所示。

图1 基于拉曼激光雷达的大气水汽监测系统结构图
根据图1可知,激光发射器能够通过大气气溶胶层,保证基波发射稳定的同时,达到实时性的监测效果,光电接收器能够接收发射并折返激光波,并实时观测相关监测数据,信号处理器能够获取CCD接收并处理数据,通过拉曼激光雷达技术采集大气水汽信号,探测大气中的散射光子数和回波光干数,根据监测数据计算大气水汽的信噪比,推导大气中水汽占比公式,从而实现大气水汽实时监测。
2 基于拉曼激光雷达的大气水汽监测系统硬件设计
基于拉曼激光雷达的大气水汽监测系统硬件主要由激光发射器、光电接收器和信号处理器三部分组成。采用激光发射器,通过大气的气溶胶层,确保雷达激光发射频率稳定性,利用光电接收器,接收发射并折返激光波,获取最精准的数据,通过信号处理器,获取CCD接收数据并处理,增强系统处理速度与运行速度,由此搭建系统硬件部分,评估与归纳获得最接近实际的大气水汽监测数据。
2.1 激光发射器
为稳定雷达激光的发射频率,基于拉曼激光雷达的大气水汽监测系统采用的激光发射器结合振荡器和放大器的优势,发射棒多采用掺杂氮化镓材质的纳米棒,将纳米棒放置在发射器内部的绝缘硅层上,连接原子级光滑银,产生共振磁场从而发射激光[4-5]。
传统激光发射器的基波多为355 nm或532 nm,难以通过大气中的气溶胶,且激光发射频率不稳,使监测结果与真实数据存在一定的误差,本文采用的激光发射器基波为1 064 nm[6],不仅可以完全地通过大气的气溶胶层,而且能够保证发射频率的稳定性,使接下来的监测结果更加地贴近于大气水汽的真实情况。
2.2 光电接收器
光电接收器在功能上可分为光学接收部分、激光发射部分和信号处理部分。光学接收器的工作原理如图2所示。
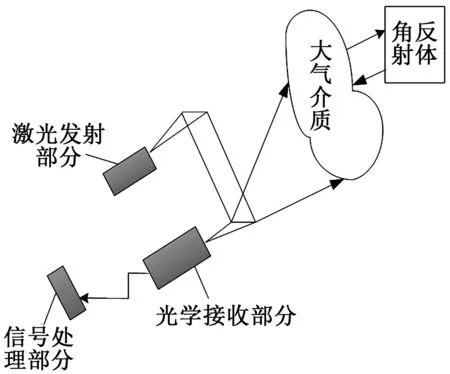
图2 光学接收器的工作原理
根据图2可知,光电接收器共有两大核心构建,分别为CCD接收头、望远镜。
CCD接收头利用图2的光学接收器工作原理进行工作,它的主要作用为接收发射并折返的激光波,而望远镜则是相关工作者的主要观察工具,在相关工作者通过望远镜对大气水汽进行实时观测的同时会记录相关的监测数据,CCD接收头也会将同时接受的激光波进行实时数据接收,通过光纤将所得到的实时数据传递到信号处理器部分,本文的设计可以达到人力与智能的双保险监测,进而获取最精准最保险的数据。
接收望远镜是直径为625 mm,相对孔径为7.37的卡塞格林型望远镜,主、副镜都涂有铝膜,更适合接收宽波段的紫外光至可见光。安装有一个变径小孔径光阑,可将接收望远镜的主、副镜的焦点相结合,使接收镜头视场角在0.5~3 mrad范围内可变,后继光学单元是由目镜、分色片和干涉滤光片组成[7-8]。由JGS1石英玻璃制成的目镜,可以将接收到的大气反射光转化成平行光。其结构如图3所示。

图3 望远镜结构图
由图3可知,信号探测是由光电倍增管、放大器、高压电源以及致冷器组成。两个用于Raman波长探测的光电倍增管是9214QB,一个用于Rayleigh-Mic波长探测的光电倍增管是9817B。以上所述的波长监测器由英国 EMI公司制造,线性聚焦光电倍增管的响应速度快,线性好,增益高,噪声低[9]。为降低暗电流,提高信噪比,采用了FACT50制冷机(-30 C),并配备了3个光电倍增管,3套放大器均采用了美国EG&G公司的VT120型前置脉冲放大器。
2.3 信号处理器
信号处理器结构主要由分光器件、光电倍增管、计算区三个部分组成,其结构如图4所示。

图4 信号处理器结构图
根据图4可知,分光器件通过光纤与CCD接收头相连接,它的主要作用是获取CCD接收并处理得到数据,但是由于获取的数据极为庞大且复杂,所以为了保障该系统的稳定运行,信号处理器结构安装了两个光电倍增管来缓存分光器件获取的相关数据[10]。
光电倍增管可以增强本文所设计系统的整体处理速度与运行速度,极大地削弱了卡顿、延迟、崩溃等现象发生的概率,并且具有强大的IO云吞能力,可以大大增强本文所设计系统对外部事物的处理反应能力。
计算机部分则为信号处理器结构中最为重要的部分,由分光器件获取并由光电倍增管缓存的相关实时数据,最终都会交由计算机进行计算与处理[11-12],计算机不仅会对所获得的数据进行实时计算,而且还可以与相关工作者获得的数据进行实时配对与差别对比,最终通过评估与归纳获得最接近实际的大气水汽监测数据。
3 基于拉曼激光雷达的大气水汽监测系统软件设计
拉曼激光雷达技术分为震动拉曼散射激光雷达和转动拉曼散射激光雷达两种类型[13]。与大气中被照射的气体或者液体的内部运动形式有关,内部运动为震动就采用震动拉曼散射激光雷达方法,如果分子内部运动为转动,则利用转动拉曼散射激光雷达方法采集大气中的水汽信号。
大气水汽中的散射光子数和回波光干数是人肉眼看不见的,散射光子和回波光存在空气5 km以外的对流层内,只有借助其他可测量的数据进行推理估算完成探测,这是因为大气水汽中的组成分子与空气中氧气相互稀释,在一定程度上破坏大气的空气质量,只有空气5 km以外才能保留散射光子和回波光的分子,并消除空气大气衰减的分子[14-15]。水汽分子在高度5 km的探测出的震动拉曼散射光雷达光子数的表达式如下所示:
(1)
其中:CA(γ)为测试仪器常数,当气体为水汽时,CA(γ)N2为测试激光雷达系数对于水汽分子的拉曼散射波长仪器常数,单位为m3;N2是脉冲激光发射的光子数;S(t)是接收望远镜的有效截面积,单位为m2;c是空气中的光速;Δt是拉曼激光雷达的时间分辨率,单位是s;(Z)是气体的几何因子系数;Tn2是气体通道的光学透过率;Sn2是气体分子的浓度,单位为g/m2。
同理水汽分子在高度Z(km)的探测出的震动拉曼散射光雷达光子数的表达式如下所示:
(2)
其中物理参数与公式(1)相同。
探测完成大汽中散射光子数和回波光干数和激光雷达的回波信号后,不计空气层的微干扰信号,计算激光雷达的大气的信噪比公式如下所示:
(3)
其中:N2是大气水汽的脉冲回波信号,M为手机激光雷达的光脉冲数。
通过公式(2)和(3)的推导,计算出大气水汽的占比。基于拉曼激光雷达的大气水汽监测系统软件的工作流程如图5所示。
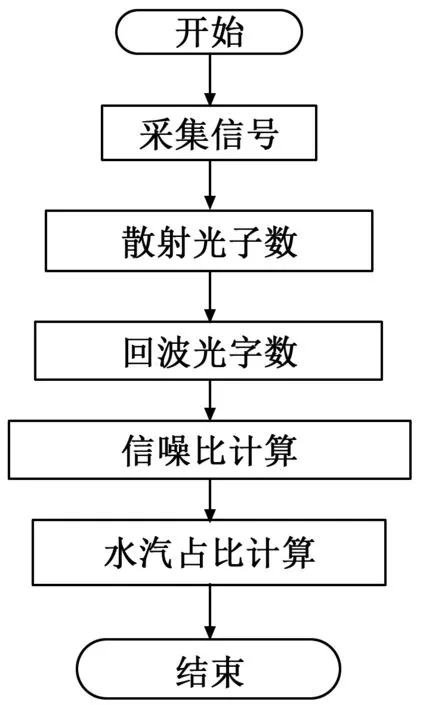
图5 大气水汽监测系统软件的工作流程
通过图5可知,基于拉曼激光雷达的大气水汽监测系统分为5个程序,分别通过拉曼激光雷达技术去采集大气水汽的信号,然后通过探测大气中的散射光子数和回波光干数,根据监测到的数据计算大气水汽的信噪比,最后根据信噪比公式推导出大气中水汽的占比公式,从而实现大气水汽实时监测。
4 实验分析
4.1 实验参数
在此对比实验中,根据两个不同的实验参数进行对比实验,提升整体的对比效果,保证对比实验的完整性,设置的实验参数如表1和表2所示。

表1 实验参数1

表2 实验参数
4.2 实验方法及步骤
为精准评估本文设计的基于拉曼激光雷达的大气水汽监测系统的监测能力,根据不同的性能,设置相应的实验环境进行对比实验,选择本文设计的基于拉曼激光雷达的大气水汽监测系统和基于GPS遥感的大气水汽监测系统及基于气象卫星的大气水汽监测系统为实验对象,在相同的实验环境下进行对比实验,对比3种大气水汽监测系统的数据处理时间和监测准确性。
由于大气水汽监测系统工作环境复杂,数据采集与计算难度大,因此需要设置相应的实验环境。根据大气空气分子的分布标准可以得知,在相同高度下,水汽分布密度比大气分布密度约小三个数量级。通过对气体的研究发现,在相同高度、气压、温度环境下,大气中氮气的分布密度与水汽的分布密度相近,且由于水汽的回波信号较难采集,因此本文选用氮气作为参考,从而降低对比实验的难度,减少实验误差,提高实验结果准确性以及可靠性,实验的具体操作步骤如下:
1)设置相应的密闭空间,首先抽取密闭空间内的所有气体,使其成为真空状态,然后按照一定空气比例,向密闭空间内注入空气成分,模拟大气环境,记录各种气体的注入量,尤其是氮气的注入比例。
2)根据系统需求,安放各种硬件设备,调整设备参数,使其回到初始化状态。将计算机与各种硬件设备连接在一起,确保数据采集、接收和分析过程处于本文系统的监测范围内,将激光发射器和光电接收器放置在不同位置,向密闭空间发射激光射线,调取光电接收器接收到的数据和信号处理器的处理数据进行保存,设定存储位置,保证实验数据的完整性。
3)启动大气水汽软件程序,对采集数据和信号进行相应的计算,计算氮气在密闭空间内的占比,生成计算结果,并与氮气的注入比例进行对比,生成对比图表。
4)更换实验对象,对氮气比例进行再次监测。
5)回到步骤1)将密闭空间内的气体全部抽取,改变氮气的注入量,采用单重大气水汽监测系统进行再次监测。
4.3 结果分析
根据上述实验方法及步骤,在相应的实验环境下进行对比实验,对比基于拉曼激光雷达的大气水汽监测系统和基于GPS遥感的大气水汽监测系统及基于气象卫星的大气水汽监测系统的数据处理时间和监测准确性。
数据处理时间对比如图6所示。

图6 数据处理时间对比图
从图6可以看出,本文设计的基于拉曼激光雷达的大气水汽监测系统的平均数据处理时间仅为21.6 s,相比基于GPS遥感和基于气象卫星的大气水汽监测系统的数据处理时间短,其原因在于采用多种软件算法配合硬件设备的使用,实现数据采集、数据接收、数据处理、数据计算的一体系统,缩短数据传输途径,缩短了数据传输时间。而基于GPS遥感的大气水汽监测系统的数据处理时间较差,原因在于其采集的数据被传输至卫星,再由卫星传输至处理器,传输途径较远,延长了数据处理时间。基于气象卫星的大气水汽监测系统技术不够成熟,设备不够先进,对于复杂数据的处理过程较慢,降低了其整体的数据处理时间。
进行数据处理时间对比后,针对系统的监测准确进行对比,对比结果如图7所示。

图7 监测准确率对比图
从图7中可以看出,本文设计的基于拉曼激光雷达的大气水汽监测系统的监测数据与实际数据十分相近,监测准确率可高达91%,具有较高的监测准确率,其优势在于:激光发射器的发射频率稳定,采用的软件程序计算采集数据携带的水汽信息精准,而基于GPS遥感的大气水汽监测系统应用的技术不成熟,所以其监测准确率较低。基于气象卫星的大气水汽监测系统的设备易出故障,应用技术较少,造成其误差较大,准确率较低。
综上所述,本文设计的基于拉曼激光雷达的大气水汽监测系统的数据处理时间较短,监测准确率较高,更适用于大气水汽的监测和研究。
5 结束语
为提高当前大气水汽监测系统监测准确率,缩短数据处理时间,设计了基于拉曼激光雷达的大气水汽监测系统,对其激光发射器、光电接收器和信号处理器等三种物理硬件进行的详细介绍,阐述了其系统软件的工作流程和算法,通过激光发射器发射波长为1 036 nm的激光射线,计算经过水汽分子散射后的回波信号携带的大气水汽分子信息,可以判断当前环境下,水汽在大气中的含量,推测其对生产作物和人类活动的影响,使人们能够预测大气水汽的变化规律,将其应用到实践生产中,从而借助自然资源获得更多的经济效益。
