前方交会原理下的立体模型接边精度检查方法
2021-03-03尚大帅赵羲蒋丹妮达利春
尚大帅,赵羲,蒋丹妮,达利春
(1.信息工程大学,郑州 450001;2.61363部队,西安 710054)
0 引言
随着航天遥感技术、成像传感器技术的不断发展,遥感卫星的数据获取能力越来越强,尤其是立体影像数据获取能力,一系列高分辨率立体遥感卫星系统开始不断涌现,典型的如美国的WorldView、法国的Pleiades。我国在2019年11月发射了首颗民用亚米级光学传输型立体测绘卫星——高分七号,在高分辨率立体影像获取方面已跨入国际先进行列[1]。
但是,高分辨率立体遥感影像由于受到立体条件和高空间分辨率的影响,幅宽较窄,单幅立体影像覆盖面积有限,大面积、大范围应用需要多幅拼接;另外,后期数据处理和产品制作对接边精度都有明确的规定。故接边精度是影响高分辨率立体卫星影像广泛应用的重要因素,是高分辨率立体影像产品质量的重要技术指标之一。
目前,大部分研究主要集中在提高影像的几何精度方面(绝对定位精度),包括在轨定标技术[2-4]以及后处理方法[5-6]等研究;在影像产品精度评价方面[7-8],主要围绕单景或者单模型的几何与辐射质量评价,很少考虑模型间的接边精度。在立体影像高精度测绘工程应用中,为检查立体模型接边精度,多采用手动立体量测方式,效率较低,且精度容易受到作业员立体观测能力影响。因此,为高效准确评估立体模型接边精度,推动其大范围工程化应用,本文提出了一种基于前方交会的立体模型接边精度检查方法,并利用Matlab语言编程实现了该方法。
1 方法流程
接边精度是立体模型质量的重要指标之一。首先,通过自动匹配或者人工判刺方式获取同名像点信息;然后,根据像点坐标关系或者地理位置信息判断立体像对关系,并进行前方交会获取对应地面点的地理坐标;最后,根据投影要求进行高斯正算,并计算坐标较差,分析评估接边精度。具体流程见图1。

图1 立体模型接边精度检查方法流程
1.1 基于立体模型,通过自动匹配或者人工判刺方式获取同名像点坐标
首先,根据立体模型的重叠关系和接边检查要求,确定同名像点的数量和分布;然后,通过人工判刺方式获取同名像点,或者制定匹配模板,通过自动匹配方式获取同名像点(同名像点是两个立体像对上的一对同名点,是四维重叠);最后,基于判刺或者匹配结果,提取点号、影像名和像点坐标等信息,组成同名像点文件。
1.2 根据像点坐标关系或者地理位置信息判断立体像对关系,并进行前方交会获取对应地面点的地理坐标
立体像对两张影像间的重叠度一般在90%以上,相邻两个立体像对之间的重叠度一般在10%左右。因此,同一立体像对内两张影像间地理位置基本一致,主要体现在两张影像定位文件中的LAT_OFF和LONG_OFF参数很接近,故可通过影像间这两个参数关系判断其是否为立体像对。同理,同一立体像对内两张影像上同名点的像点坐标也基本一致,故可通过影像间的同名像点坐标关系判断其是否为立体像对。
基于同名像点坐标和对应定位文件(有理函数模型、RPC文件)进行前方交会得到对应地面点的地理坐标。有理函数模型是表示像方坐标(r,c)与相应的地面点三维地理坐标(P,L,H)关系的多项式,具体描述如式(1)、式(2)所示[9-10]。
(1)
(2)
式中:(LINE_OFF,SAMP_OFF)为像方坐标平移参数、(LINE_SCALE,SAMP_SCALE)为像方坐标缩放参数、(LAT_OFF,LONG_OFF,HEIGHT_OFF)为三维地理坐标平移参数、(LAT_SCALE,LONG_SCALE,HEIGHT_SCALE)为三维地理坐标缩放参数,共10个参数;NumL(Pn,Ln,Hn)、DenL(Pn,Ln,Hn)、NumS(Pn,Ln,Hn)和DenS(Pn,Ln,Hn)为RPC系数,共80个参数。这90个参数都可从影像的定位文件中提取。假设自动匹配或者人工判刺方式获取同名像点坐标为(rleft,cleft)和(rright,cright),则可建立如式(3)所示方程组。
(3)
线性化之后,迭代解算可得到地面点三维地理坐标(P,L,H)。其中,迭代解算时地面点三维地理坐标的初始值(P0,L0,H0)可取立体像对两影像物方平移参数的平均值(式(4))。
(4)
1.3 设置投影方式和椭球参数,通过高斯正算解算地面点的高斯坐标
首先,根据后续数据处理和应用需求,选择3°带投影或者6°带投影;其次,依据前方交会计算得到的地面点三维坐标(P,L,H)计算得到中央经线和带号,如式(5)所示。
(5)
式中:int()为取整函数;Daihao6为6°带带号;Central_Meridian6为6°带中央经线;Daihao3为3°带带号;Central_Meridian3为3°带中央经线。最后,设置椭球的长半轴、短半轴、扁率等参数,利用高斯正算公式计算地面点高斯坐标。
1.4 基于高斯坐标计算接边差,统计计算中误差、平均值等各类精度指标,分析评估接边精度
首先,基于高斯坐标(X,Y,Z)计算模型接边差,包括高斯X方向、高斯Y方向、平面S方向、高程Z方向;其次,统计计算各方向接边差的中误差、最大值、最小值、平均值、均方差等精度指标;最后,分析评估接边精度。其中,最大值、最小值能够分析接边差的极限值;算数平均值可分析系统差情况,值越小,说明存在的系统差越小;中误差能够分析接边差的整体情况,值越小说明接边精度越好;均方差代表接边差分布的离散程度,在一定程度上反映接边差的几何一致性,值越小,说明接边差越集中,几何一致性越好。
2 实验分析与验证
为了对该方法进行验证,利用Matlab语言编程实现了该方法,并搜集多组实测数据开展实验。
2.1 实验数据
数据一:国内某卫星于分别2017年8月和2018年2月拍摄的两景立体像对,成像区域为城乡结合部,地物种类丰富,丘陵地地形,基本情况如图2所示。立体像对的前视影像分辨率为0.5 m左右,后视影像分辨率为0.6 m;绝对定位精度(中误差)平面优于10 m,高程优于10 m。
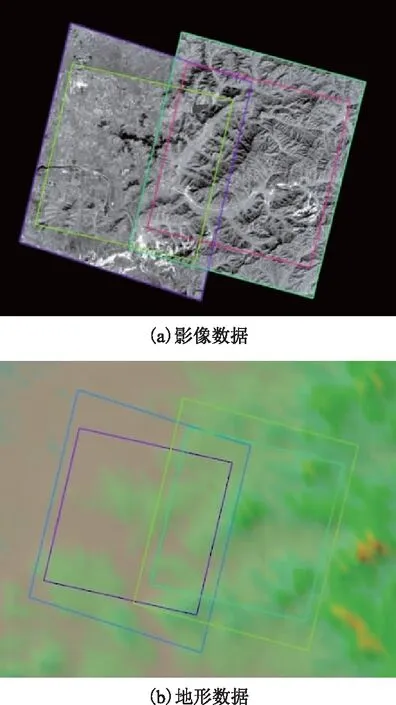
图2 数据一基本情况
数据二:国外某卫星于2014年4月拍摄的两景立体像对,成像区域为山区,地物稀少,山地地形,基本情况如图3所示。前视影像分辨率为0.50 m,后视影像分辨率为0.52 m;绝对定位精度(中误差)平面优于5 m,高程优于5 m。
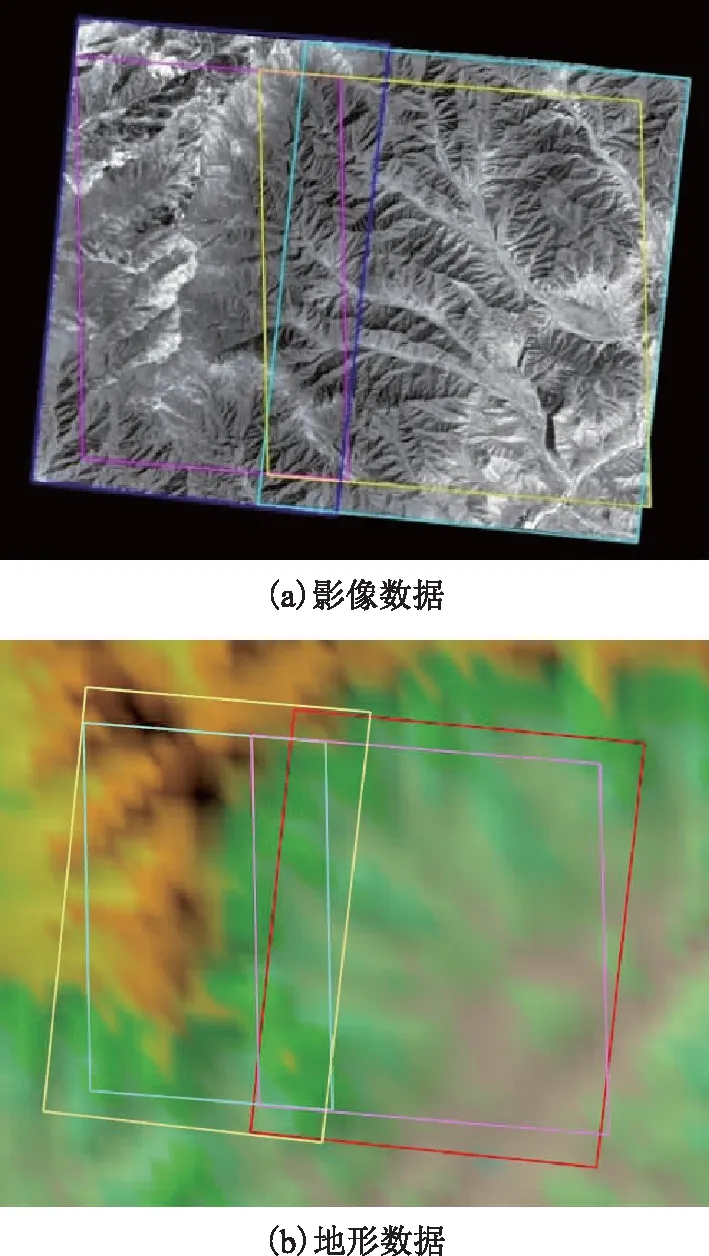
图3 数据二基本情况
2.2 实验结果与分析
为避免同名点匹配误差对接边精度检查造成影响,采用人工手动方式选取同名点,在立体像对接边区域内均匀选择八个同名像点参与接边精度检查,两组实验数据统计结果见表1。为避免左右视差对立体观测精度的影响,需对立体像对进行消视差处理;在摄影测量系统中,建立高斯坐标系统工程,对相同点位(八个)进行立体观测,分别量测其左右模型的坐标信息,检查接边精度,两组实验数据统计结果见表2。
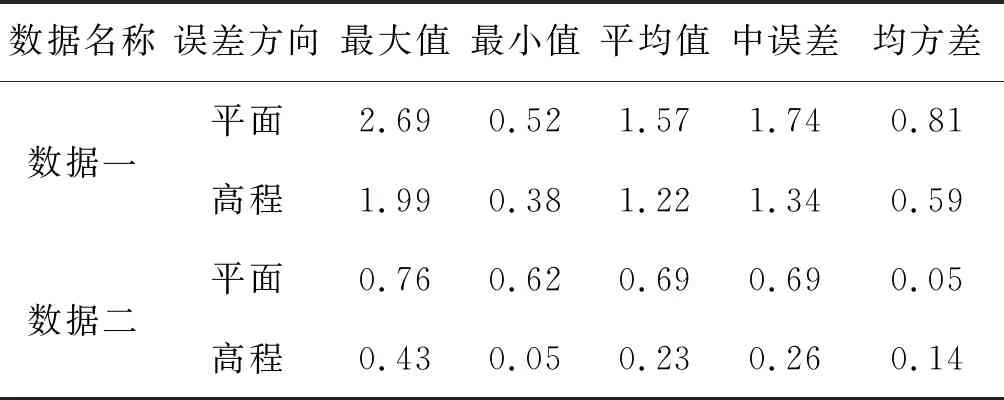
表1 前方交会计算的接边精度统计 m
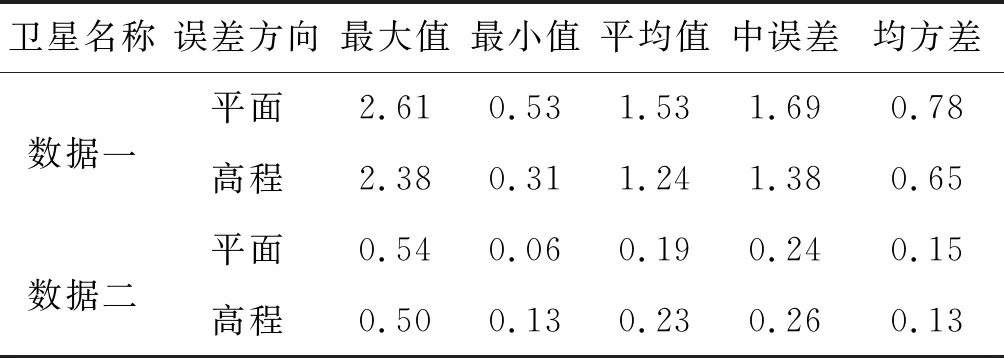
表2 人工立体观测的接边精度统计 m
结合实验过程和结果对实验作如下分析。
分析数据一统计结果可知,数据一接边精度较差,且不稳定。通过将立体观测结果和前方交会计算结果比较,两者在平面方向和高程方向的最大值、最小值、平均值、中误差、均方差等指标表现基本一致;尤其是在平均值(反映接边精度有无系统性误差)和中误差(反映接边误差的大小)这两项指标上,相差很小,说明前方交会自动计算方法能够准确检查立体模型间的接边精度情况。
分析数据二统计结果可知,数据二接边精度较好。通过将立体观测结果和前方交会计算结果比较,两者在高程方向上的最大值、最小值、平均值、中误差、均方差等指标方面表现基本一致;但是平面方向有一定偏差:前方交会计算结果具有明显的系统性,而立体观测结果相对随机,其原因主要是影像重叠区域位于山区,特征选取困难,平面方向观测误差较大,而影像接边误差较小,致使观测误差影响了接边精度的检查。因此,前方交会自动计算方法能够准确检查模型间的接边精度情况。
数据处理效率方面,基于前方交会自动计算的方法主要耗时点在于同名点的选取(手动选取),基于数字摄影测量系统立体观测方法主要耗时点在于立体观测以及观测结果的输出。相比之下,同名点选取不依赖立体环境,操作简单,效率更高。另外,同名点可直接记录在点文件中,不用手动输出结果,减少了人为误差,结果更加准确可靠。
2.3 算法应用验证
在实际生产应用中,完成区域网平差后,一般需要检查各模型间的接边差。为了对本文算法作进一步应用验证,搜集国内某卫星于2020年拍摄的两轨共六个立体像对数据进行试生产,包括添加连接点进行自由网平差处理和在自由网平差基础上添加控制数据(四个控制点)进行控制网平差处理。其中,数据基本情况(立体模型数据和控制点数据)如图4所示。然后,利用同一组同名像点数据(九个均匀分布的同名像点)基于本文算法分别对自由网平差处理前轨道间立体模型接边精度、自由网平差处理后轨道间立体模型接边精度、控制网平差处理后轨道间立体模型接边精度进行检查。最后,对检查结果进行统计分析,具体统计结果见表3。

图4 区域网平差实验数据基本情况

表3 区域网平差实验的接边精度统计 m
依据统计结果分析:该批数据的立体模型轨道间接边精度存在一定的系统误差,其中平面方向约1.5 m,高程方向约3 m;自由网平差处理可较好地消除该误差,提高模型间接边精度,添加控制点进行控制网平差处理对接边精度基本没有影响。以上结果与摄影测量区域网平差理论分析结果基本一致,再次验证了本文算法的有效性。
3 结束语
立体模型接边精度是制约其大范围应用的重要因素,是评价立体影像质量的重要指标,本文提出的基于前方交会的立体模型接边精度检查方法能够高效准确地检测其接边精度。检测结果可为后续数据处理与精度分析提供指导,为影像使用方选择立体模型提供参考。
但是,该方法检测结果受同名点选取精度影响较大,手动选取精度较高,分布也更加合理,但效率不高;后续还需要加强匹配算法研究与匹配模板设计,提高同名点自动匹配的精度以及点位分布的合理性,进一步提高该方法的精度和效率。
