柔性关节机械臂的自抗扰预设定有限时间跟踪控制
2021-03-03李小华
王 刚,李小华
(辽宁科技大学 电子信息与工程学院,辽宁 鞍山 114051)
随着社会的发展和科技的进步,机械臂已广泛应用于医疗、航空航天、农业采摘、仿生机器人等领域[1-4]。在实际应用中,机械臂总会遇到各种扰动,而且其动力学模型不可避免地存在不确定性,使系统稳态性能变差,甚至导致系统不稳定。因此,在控制器设计中,考虑扰动和不确定性是十分必要的。
关于机械臂系统的跟踪控制问题,目前已有大量研究成果。按控制方法大致分为四种类型。第一类是基于PID的机械臂系统跟踪控制[5-6],其中包括一些智能PID的控制研究。如文献[6]针对具有参数不确定的柔性关节机械臂系统,提出一种模糊整定PID控制器,增加控制器的鲁棒性和自适应性。第二类是基于自适应、鲁棒控制方法的跟踪控制研究,可显著提高系统对不确定因素和外部干扰的适应性[7-8]。第三类是基于韩京清提出的自抗扰控制(Active disturbance rejection control,ADRC)设计的控制器[9],采用ADRC框架将系统的所有不确定性(包括内部和外部)作为一个附加的状态变量,利用扩张状态观测器(Extended state observer,ESO)估计增广状态,并对总扰动进行实时补偿,提高了系统的抗干扰性能[10-12]。第四类是基于backstepping技术的跟踪控制研究,目前是研究的热点。其中一类对系统中出现的参数不确定性采用神经网络进行在线逼近,利用backstepping方法设计机械臂系统的自适应神经网络跟踪控制器[13-14];一类文献针对具有外部扰动的机械臂系统设计预设性能控制器,只要被控量的初始值在预设性能函数范围之内,该控制器就能同时保证系统的动态性能和稳态性能都达到预期效果[15-16];另一类基于有限时间稳定判据,针对具有外部扰动机械臂系统设计有限时间跟踪控制器[17-18],使系统的跟踪误差在有限时间内收敛到原点附近的小邻域内或平衡点,且不受外部扰动的影响。但是有限时间控制方法的停息时间受系统初始状态的影响,如果初始状态不佳,则难以达到预定的停息时间。因此,文献[19]将预设性能控制和有限时间控制相结合,提出预设有限时间控制的新方法,通过使用一个预设有限时间性能函数对跟踪误差进行约束,使得系统的停息时间与初始状态无关。这类方法在控制器设计中具有更大的优越性。
本文针对一类具有外部干扰和不确定性的柔性关节机械臂系统,结合预设有限时间控制方法和自抗扰控制方法,提出一种自抗扰预设定有限时间跟踪控制的新方法,与已有的预设性能有限时间控制方法相比,它可在系统存在外部干扰和不确定因素时准确保证系统的暂态和稳态性能符合预定要求,同时更好地提高系统的抗干扰性。
1 柔性关节机械臂模型及控制目标
柔性关节机械臂如图1所示。电机的转子直接耦合到其驱动的连杆上,再通过一个弹性联轴器连接机械臂部分。这个弹性联轴器可视为柔性关节。根据文献[20]的假设,可以将柔性关节简化成一个线性弹簧。
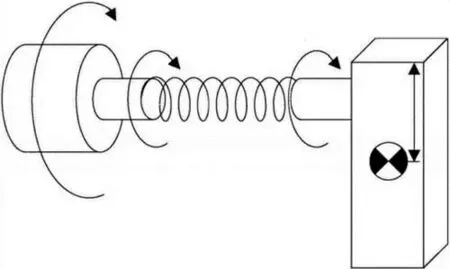
图1 柔性关节机械臂模型Fig.1 Model of flexible joint manipulator
已知M为机械臂质量,g为重力加速度,L是机械臂质心到末端距离,q是机械臂角位置,θ是电动机轴角位置,K为弹性系数,u为控制力矩,I和J分别为连杆和电机的转动惯量。柔性关节机械臂系统的动力学方程为[21]

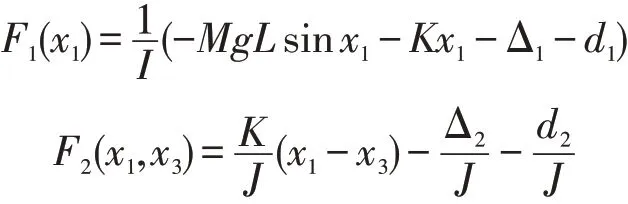
式中:d1和d2为有界干扰信号;Δ1和Δ2为模型不确定部分,表示为

这里ΔI,ΔJ,ΔK和ΔM分别为变量I,J,K和M的不确定部分。定义系统状态变量x1=q,,则式(1)可改写为
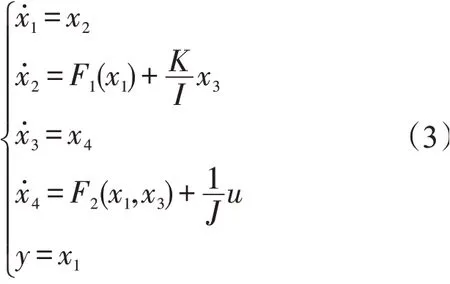
其中
本文的控制目标:针对柔性关节机械臂系统(3),用backstepping方法设计自抗扰预设定有限时间跟踪控制器,使得系统:(1)保证跟踪误差e1=y-yd在任意给定的有限时间内按预设的暂态和稳态性能收敛到平衡点附近的邻域内;(2)闭环系统中所有信号是有界的;(3)在受到外部干扰和模型不确定情况下,实现该机械臂系统输出的准确跟踪。
为实现这个控制目标,给出如下假设、引理和定义。
假设1F1(x1),F2(x1,x3)为连续未知函数,其一阶导数连续有界。
假设2 期望轨迹yd及其一阶导数连续有界。
假设3 所有系统状态xi(i=1,2,3,4)都可测量。
引理1[22]对于系统(3),如果存在一个正定、径向无界、连续可微的Lyapunov函数V:Rn→R,以及常数a0>0,b0≥0,使得下式成立则系统存在唯一解,且系统所有信号是一致最终有界的。

为了得到本文结果,先定义一个预设有限时间性能函数。
定义1[19,23]如果光滑函数ρ(t)满足如下四个性质(4)在t≥Tf时间后ρ(t)=ρTf,则称这个函数为预设有限时间性能函数。
本文选择预设有限时间性能函数为[23]

其中ρ0>0、ρTf>0和Tf>0是设计参数。从式(5)可以看出,ρ(t)满足定义1的所有条件,且已在文献[23]中被证明是光滑的。为方便后面推导,将ρ(t)简写为ρ。
2 控制器设计
采用backstepping方法给出柔性关节机械臂系统(3)的自抗扰预设定有限时间跟踪控制器设计过程。
首先进行坐标变换
其中,α1,α2,α3是需要设计的虚拟控制律,并取

第1步 针对第一个子系统,选Lyapunov函数为

对其求导可得
令
则

取

其中,c1>0为设计参数。将式(12)带入式(11),可得

第2步 针对第二个子系统,选Lyapunov函数为

对式(14)求导,可得
为了避免虚拟控制反复求导带来的计算复杂性,引入跟踪微分器(Tacking differentiator,TD)对虚拟控制α1的导数进行估计[24]。跟踪微分器TD1

式中:v11和v12是TD1的状态变量;λ>0和0<δ<1是设计参数,通过选择合适的值,可以使v11和v12分别跟踪信号α1和它的微分信号α˙1。

定义跟踪微分器(16)的估计误差

对未知函数F1(x1),本文使用扩张状态观测器(Extended state observer,ESO)来估计[24],这里给出扩张状态观测器建立方法。对于第二个子系统

其中,ω(t)是未知函数F1(x1)的导数,也是未知的。参照文献[24]建立扩张状态观测器ESO1

式中:Z11和Z12是ESO1的状态;E1是ESO1的Z11对x2的估计误差;状态Z12是对x22的估计;β11>0和β12>0是扩张状态观测器增益。
选择适当的参数β11和β12,可以使观测器很好地估计系统(19)的状态x2及被扩张的状态x22。定义ESO1扩张状态的估计误差

将式(17)和式(21)带入式(15),可得
取第2步的虚拟控制为

将式(23)带入式(22),使用Young’s不等式缩放,可得
其中,c2>1为设计参数。
第3步 针对第三个子系统,选Lyapunov函数为

对式(25)求导可得
2.2 应对方式 干预前,两组CSQ量表积极应对及消极应对评分比较,差异无统计学意义(P>0.05);分娩前6 h及分娩后1周,观察组积极应对评分均高于对照组,消极应对评分低于对照组,差异有统计学意义(P<0.05)。见表2。
对虚拟控制α2的导数使用TD2进行估计。设计TD2为

定义TD2的估计误差

将式(28)带入式(26),可得
取第3步的虚拟控制

将式(30)代入式(29),利用Young’s不等式可得
第4步 针对第四个子系统,选Lyapunov函数为

对其求导,可得
引入跟踪微分器TD3对虚拟控制的导数进行估计,设计TD3如下

定义TD3的估计误差

对未知函数F2(x1,x3),利用ESO2进行估计
定义ESO2扩张状态的估计误差

将式(31)、式(35)和式(37)带入式(33),可得
取第4步的控制律为

将u带入式(38),使用Young’s不等式缩放,可得
其中,c4>1是设计参数。
至此,可以给出本文的结果如下。
定理1对于满足假设1~3的柔性关节机械臂系统,若有系统跟踪误差的初值根据虚拟控制律(12)、(23)和(30)以及控制律(39),则闭环系统的跟踪误差可以在任意给定的有限时间内按预设的暂态性能和稳态性能收敛到平衡点附近的邻域内,且系统中的所有变量都是有界的,从而能实现系统输出的准确跟踪。
证明(1)稳定性的证明。
系统的Lyapunov函数为V=V4,有V≥0。在虚拟控制律(12)、(23)、(30)和控制律(39)的共同作用下有式(40)。因为TDi和ESOj的逼近误差ηi(i=1,2,3)和εj(j=1,2)有界,所以知

有界,取a0=min{2c1,2(c2-1),2(c3-1),2(c4-1)},则式(40)可写为V˙≤-a0V+b0。根据引理1可知,闭环系统中所有变量是有界的。
(2)证明跟踪误差能在任意给定的停息时间内收敛到平衡点的任意给定的小邻域内。

如果取ρTf足够小,即可实现机械臂系统输出的准确跟踪。证毕。
3 仿真实验
为了验证本文所提方法的有效性,对此类单关节柔性机械臂控制系统进行仿真实验。考虑模型(1)参数为[25]:M=2.3 kg,L=1 m,I=2.3 kg·m2,J=0.5 kg·m2,K=15 N·m/rad,g=9.8 m/s2。模型不确定部分
其中,外部扰动d1=sint,d2=cost,参考输入yd=0.5(sin 0.5t+sint+sin 2t)。各状态变量的初始值为:x1(0)=0.15,x2(0)=0.6,x3(0)=0.7,x4(0)=0.5。性能函数参数选取ρ0=0.8,Tf=2,ρTf=0.03。控制参数选取c1=5,c2=17,c3=180,c4=180。TD1、TD2和TD3参数λ=9,δ=0.5。ESO1和ESO2参数选取β11=100,β12=300,β21=100,β22=350。
由定理1计算出系统的自抗扰预设定有限时间跟踪控制器,对系统(3)进行仿真实验,所得结果如图2~图9所示。
图2是机械臂输出的位移跟踪结果,设计的控制器能够保证机械臂系统的输出在给定的2 s时间内跟踪上期望轨迹,并有很好的跟踪效果。
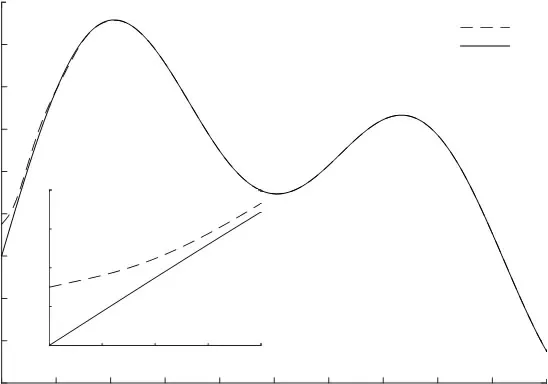
图2 输出跟踪曲线Fig.2 Output tracking curve
图3是跟踪误差曲线,跟踪误差能够被预设性能函数约束,并在指定2 s的时间内减小到事先设定范围(-0.03,0.03)内,系统的动态性能和稳态性能得到保证。
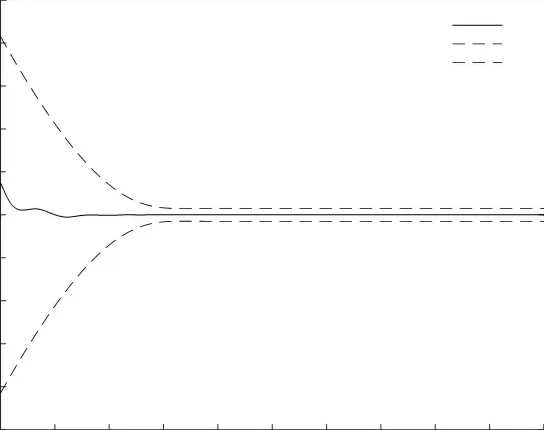
图3 跟踪误差曲线Fig.3 Tracking error curve
图4是系统的控制输入信号。由于初始时误差较大,故初始输入较大,但随着误差的迅速减小,控制输入也迅速减小。
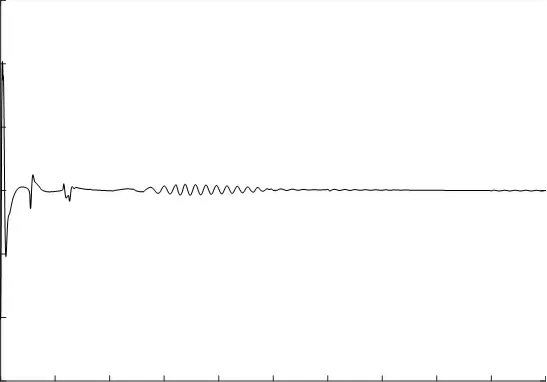
图4 系统控制输入uFig.4 System control input u
图5和图6分别是两个扩张观测器的估计效果;两条曲线重合度较高,即扩张状态观测器的输出很好地估计了F1(x1)和F2(x1,x3),符合设计需要。
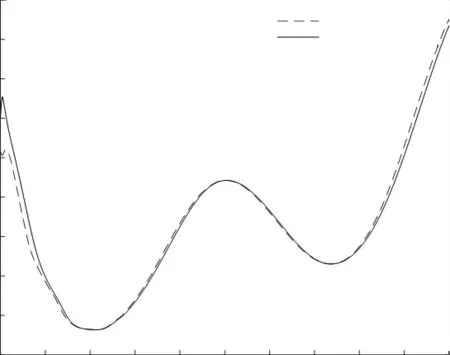
图5 ESO1观测效果Fig.5 Observation effect of ESO1
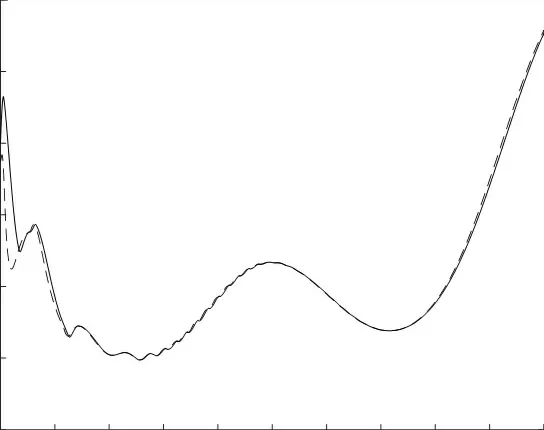
图6 ESO2观测效果Fig.6 Observation effect of ESO2
图7~图9分别为跟踪微分器TD1、TD2和TD3的跟踪效果。两条曲线变化趋势相同,即跟踪微分器很好地估计系统的虚拟控制律,达到设计效果。
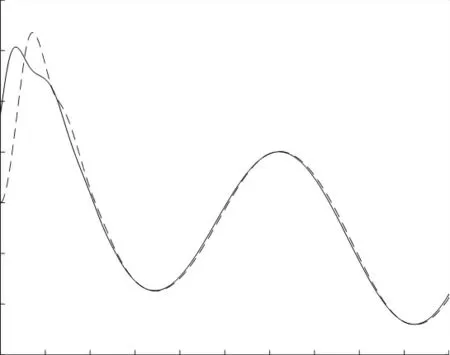
图7 TD1的跟踪效果Fig.7 Tracking effect of TD1
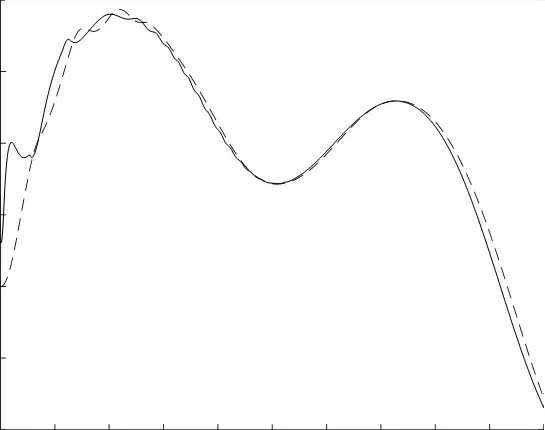
图8 TD2的跟踪效果Fig.8 Tracking effect of TD2
从这些实验结果可以看出,本文所提出的方法在系统存在外部干扰及模型不确定性的情况下,仍然能够具有很好的跟踪效果,体现了本文方法在抗干扰方面的优越性。
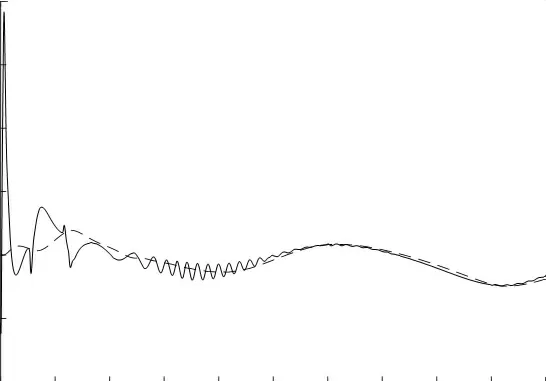
图9 TD3的跟踪效果Fig.9 Tracking effect of TD3
将本文方法与文献[24]中的自抗扰控制方法进行对比,取相同的控制参数,即c1=1,c2=15,c3=c4=180,ESO和TD的参数都相同,本文方法的预设性能参数同前,两种方法的跟踪误差变化曲线仿真结果如图10所示。本文方法在2 s时间内跟踪误差就进入到预先设定的范围(-0.03,0.03)内,而文献[24]的方法在2 s之后误差依然在波动,导致系统的输出跟踪精度较差,相对稳定性较差。因此,从跟踪效果可以看出,本文提出的方法更有优越性。

图10 本文方法与文献[24]方法的对比Fig.10 Comparison between the methods in this paper and in literature[24]
4 结论
本文提出一种柔性关节机械臂的自抗扰预设定有限时间跟踪控制的新方法,同时考虑系统的外部干扰、模型不确定性及未知非线性函数,将其等效为总扰动,利用扩张状态观测器估计这个总扰动,并对其实时补偿。该方法借助于一个有限时间性能函数,使系统输出能够在一个预先给定的停息时间内跟踪上参考信号,且保证跟踪误差按预设的暂态和稳态性能收敛到平衡点附近的邻域内。因采用自抗扰技术,该方法具有很好的抗干扰性。停息时间是一个设计参数,因而与系统初始条件无关。仿真结果验证了本文提出的控制方法的有效性和抗干扰方面的优越性。