卫星干涉式垂直探测仪图像导航配准成像试验方法
2021-03-03王田野吕旺宋效正信思博董瑶海顾强
王田野 吕旺 宋效正 信思博 董瑶海 顾强
(1 上海卫星工程研究所,上海 201109)(2 上海航天技术研究院,上海 201109)
干涉式垂直探测仪(GIIRS)是气象观测的重要仪器,其核心组件是迈克尔逊干涉仪,可对大气的垂直分层进行3维观测,高频次地获取地球大气的3维温度和湿度的分布和变化,类似于对大气做CT切片观测,广泛用于天气预报、气候和环境变化预测[1-2]。为了实现高精度的垂直探测,GIIRS在轨采用凝视成像模式,通过2维扫描镜指向选定的探测区域后,以驻留模式对区域进行连续多帧凝视成像。为了实现高精度探测,GIIRS成像对卫星平台的要求极高:垂直探测期间,要求卫星平台无动力学干扰,确保遥感数据的质量;要求GIIRS视线的指向稳定,确保驻留期间的多帧图像的相对位置关系配准精确。卫星的活动部件往复运动引起的动力学干扰会对GIIRS的成像产生严重干扰;同时,卫星的姿态抖动、轨道摄动均会引起GIIRS视线指向的变化[3],导致驻留期间的图像产生运动,对遥感数据的定量化应用造成重要影响。为了满足GIIRS的驻留探测需求,要求驻留期间(一般不小于30 s)的视线指向变化不超过1/3像元。以风云四号卫星的GIIRS为例,GIIRS空间分辨率为56 μrad,即要求驻留期间的视线指向变化不超过18 μrad,而传统的姿态控制方法很难保证长时间的视线稳定,因此需要探索新的GIIRS视线指向补偿方法。
为了解决GIIRS的成像问题,目前多采用图像导航配准(INR)[4-5]技术。其中,图像导航(Image Navigation)是指确定图像中每个像元所对应目标的绝对地理位置(经度、纬度);图像配准(Image Registration)是指保持或确定分别处于相邻2幅图像中对应像元所对应地表目标的相对位置关系。对像元所对应目标的定位和配准,合称“图像导航配准”。图像导航配准系统在轨实时工作,用于补偿空间环境各种长周期和短周期扰动对GIIRS成像的影响,为GIIRS提供近似理想的成像环境。
图像导航配准技术的实施途径包括动力学补偿和图像运动补偿2个部分[6]。动力学补偿是利用动量轮组前馈抵消星上活动部件对卫星平台姿态稳定度的影响,保证GIIRS在理想的动力学环境下成像;图像运动补偿是通过给扫描镜增加补偿量的方式消除星上各类扰动对GIIRS视线的影响[7-8],使GIIRS在凝视期间的视线指向稳定。GIIRS图像导航配准精度要求高,流程复杂,实现难度很大[9-10]。为了降低在轨应用风险,需要在地面通过试验验证技术的准确性。
通过调研分析,欧洲“第3代气象卫星”(MTG)在研发时期构建了图像导航配准技术仿真评估系统[11],利用卫星和遥感仪器的几何特征,引入各项影响图像导航配准性能的因素,以数学仿真的方式验证图像导航配准技术的有效性。在国内,文献[12]中提出了一种图像导航与配准半物理仿真试验方法,通过构建数管计算机、有效载荷分系统模拟器、动力学与姿态轨道控制模拟器、地面遥测遥控系统和性能验证评估系统,对图像导航与配准技术方案进行了仿真验证。上述数学仿真系统和半物理仿真系统未引入真实的控制对象,且无法对各项误差因素进行精确建模,只能验证星上图像导航配准技术流程的正确性,无法对技术指标进行定量考核。为此,本文提出了一种全物理仿真成像试验方法,在地面利用3轴气浮台真实模拟GIIRS和卫星在轨的动力学工作环境[13-14],并通过GIIRS样机和目标源系统构建成像系统,以成像的方式进行高精度定量考核。
1 试验方法
GIIRS图像导航配准成像试验的总体思路是:在地面模拟GIIRS受扰动后的动态成像特性,通过对比分析导航配准补偿功能开启前后的GIIRS成像效果,验证图像导航配准技术的有效性,见图1。

图1 试验总体思路Fig.1 Overall approach for test
1.1 试验流程
GIIRS图像导航配准包括动力学补偿和图像运动补偿,下面分别设计试验流程。
1.1.1 动力学补偿试验
动力学补偿试验的作用是验证活动部件扰动的抑制效果。试验流程为:①建立气浮状态,模拟空间动力学环境;②启动姿态控制系统,模拟卫星3轴稳定姿态控制;③启动活动部件,采集3轴气浮台姿态稳定度数据评估活动部件对卫星平台和GIIRS的影响;④开启动力学补偿功能,验证动力学补偿效果。
动力学补偿效果的评价依据为3轴气浮台的姿态稳定度。通过对比动力学补偿开启前后3轴气浮台的姿态稳定度变化,评估动力学补偿的有效性。
1.1.2 图像运动补偿试验
图像运动补偿试验的作用是验证GIIRS视线运动的抑制效果。试验流程为:①建立气浮状态,模拟空间动力学环境;②启动姿态控制系统,模拟卫星3轴稳定姿态控制;③启动姿态运动功能,模拟卫星在轨姿态变化对GIIRS的影响;④开启图像运动补偿功能,验证动力学补偿效果。
试验中的姿态运动范围应结合卫星实际的工作模式和控制性能设计,下面给出一种典型的姿态运动规律,姿态指向精度为0.01°,姿态稳定度为0.000 5(°)/s,滚动和俯仰姿态导引规律为
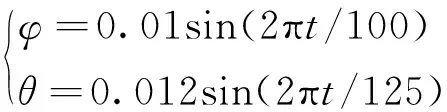
(1)
式中:φ和θ分别为滚动角和俯仰角,(°);t为姿态运动时间,s。
姿态运动曲线见图2。
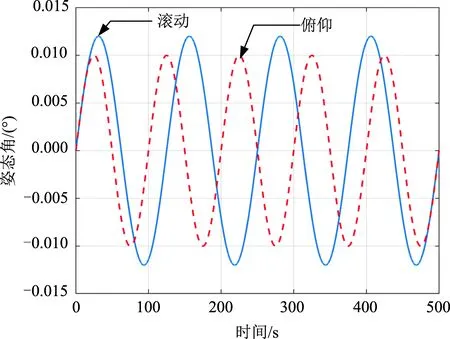
图2 3轴气浮台姿态角曲线Fig.2 Attitude angle curves of three-axis air-bearing platform
图像运动补偿试验设计了关闭图像运动补偿和开启图像运动补偿2个成像试验工况,以图像中的目标距离预期位置的角距偏差作为补偿的评价指标。通过对比图像运动补偿开启前后的目标位置偏移误差评估图像运动补偿的有效性。
1.2 难点和解决途径
1.2.1 GIIRS力学环境模拟
在地面模拟GIIRS在轨力学环境的难点主要体现在:①GIIRS和卫星的实际工作环境为零重力、微扰动的空间环境,在地面要真实模拟出GIIRS和卫星在空间环境下的动力学特性;②GIIRS在轨的活动部件扰动特性复杂,要在地面对活动部件的干扰进行模拟。
为了解决GIIRS空间环境的模拟,采用3轴气浮台等惯量模拟卫星平台,通过气浮球轴承的气体润滑实现零重力、低摩擦的3轴自由转动。为了模拟活动部件扰动对GIIRS的影响,将2维扫描运动机构安装在3轴气浮台上,等效模拟星上活动机构的往复扫描运动,产生的干扰力矩作用在3轴气浮台上,真实模拟卫星在轨工作期间活动部件运动对卫星平台和GIIRS的影响。
1.2.2 图像导航配准效果评估
高精度遥感卫星的图像导航配准精度要求高,一般为角秒量级,地面缺少高精度的图像导航配准测量设备,需要设计专用的评估方法。为了实现图像导航配准效果评估,本文设计基于GIIRS成像结果的导航配准评估方法,由目标源系统(见图3)和GIIRS样机共同实现。其中:目标源系统为准直光源,可模拟无穷远处的观测目标;GIIRS样机安装在3轴气浮台上,对安装在地面的目标源系统进行成像,模拟对地球成像过程。利用GIIRS样机的成像结果,可实现GIIRS的动态视线高精度测量,用于评估图像导航配准精度。
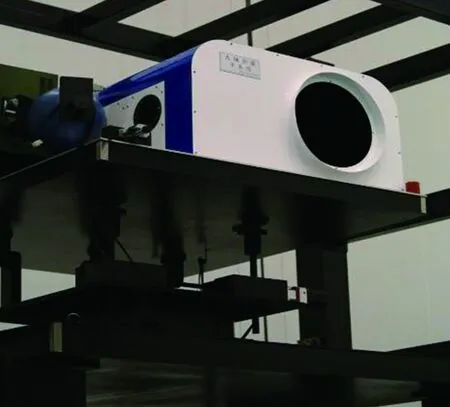
图3 目标源系统Fig.3 Target source system
1.3 误差分析
GIIRS图像导航配准全物理仿真成像试验存在一定的误差,会影响最终的试验结果,下面对主要的误差因素进行分析。
(1)成像系统误差。成像过程中有多种因素可能引起误差,包括空气流动折射、外部振动干扰、目标源系统的光学准直度误差、GIIRS样机的成像不均匀性等。
(2)图像处理误差。为获取目标在图像中的位置,需要对成像靶标中心位置进行提取,在提取过程中会引入误差。
为了验证成像系统误差和图像处理误差对试验结果的影响,可在静止状态下进行成像,并提取靶标图像的中心点坐标(见图4)。经数据分析,静止状态下的中心点提取坐标分布在3.06 μrad为半径的范围内,即成像误差和图像处理误差的综合影响为3.06 μrad(3σ)。
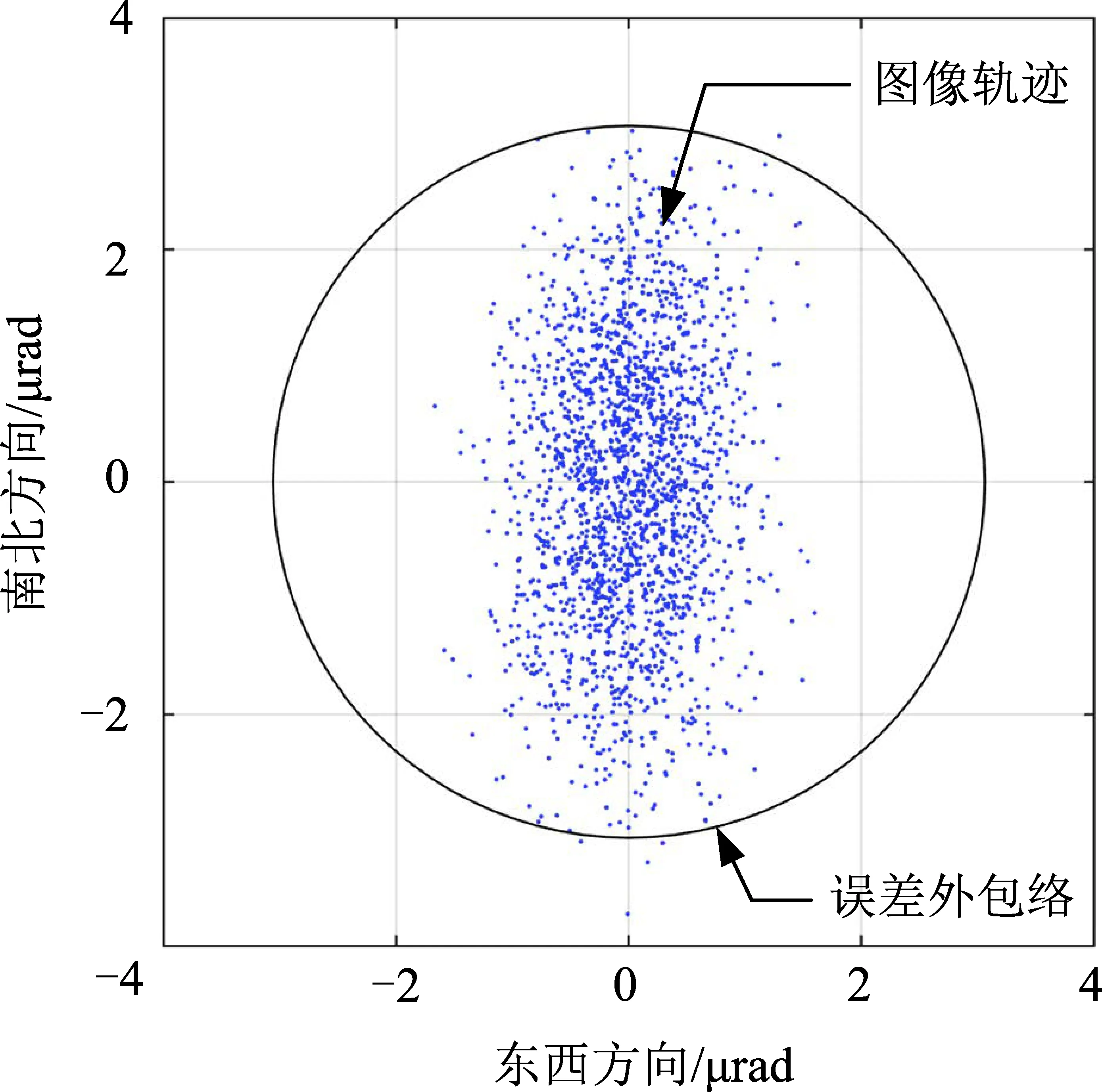
图4 静止状态下的成像目标轨迹Fig.4 Imaging target trajectory in a static state
(3)时间延迟引起的误差。图像运动补偿需要实时获取卫星姿态信息进行补偿量计算,但姿态确定环节存在微小的时间延迟,导致补偿滞后,误差为
E=ω·T
(2)
式中:ω为最大姿态角速度;T为延时时间。
本文试验最大姿态角速度为0.0006 28(°)/s,姿态角采样周期为0.1 s,时间延迟最大为1个采样周期,引起的误差最大为1.1 μrad。
综上所述,考虑成像系统误差、图像处理误差和时间延迟误差,成像试验引入的最大误差为4.16 μrad,可满足导航配准试验需求。
2 风云四号卫星应用实例
2.1 试验系统组成
GIIRS图像导航配准成像试验系统由3轴气浮台、姿态控制系统和成像系统组成,试验场景如图5所示。
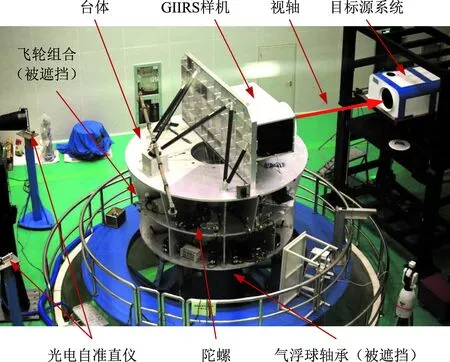
图5 GIIRS图像导航配准成像试验场景Fig.5 INR (image navigation and registration) test scene for GIIRS
(1)3轴气浮台用于模拟卫星在轨的惯量特性和零重力微扰动下自由运动环境[14]。采用的3轴气浮台承载大于5500 kg,综合干扰力矩小于0.003 N·m,惯量调节能力为3000~7500 kg·m2。
(2)姿态控制系统包括姿态测量敏感器、执行机构和姿态控制计算单元。姿态测量敏感器采用激光陀螺和2台光电自准直仪,可模拟卫星在轨的陀螺-星敏感器联合定姿,姿态测量精度达到1″;执行机构为3台反作用飞轮;姿态控制计算单元为姿轨控计算机样机。姿态控制系统具备台体稳定控制功能,控制指向精度达到3角秒,姿态稳定度达到1×10-4(°)/s。
(3)成像系统包括GIIRS样机和目标源。其中:GIIRS样机与GIIRS的设计原理相同,具备高精度成像功能,模拟在轨凝视成像过程;同时,GIIRS样机的二维扫描机构可模拟活动部件运动特性,用于验证动力学扰动对GIIRS凝视成像的影响。目标源可模拟无穷远处星图等多类型成像目标,结合GIIRS样机模拟卫星远场成像,通过成像结果评估图像运动补偿的效果。
2.2 动力学补偿试验
以风云四号卫星为例,星上活动部件的运动规律如图6所示。由于活动部件绕卫星俯仰轴转动,干扰力矩主要影响卫星的俯仰方向。通过对比动力学补偿开启前后俯仰轴方向的姿态稳定度变化,评估动力学补偿效果。
图7为姿态稳定度时域对比。动力学补偿未开启时,受到扫描镜周期性运动的影响,姿态角速度有明显的周期性振动,姿态稳定度为0.000 183(°)/s;动力学补偿开启后,有效抵消了活动部件运动对平台的影响,姿态角速度无明显周期性的振动,姿态稳定度达到0.000 093(°)/s。
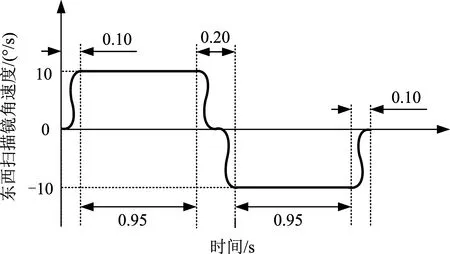
图6 活动部件扫描运动规律Fig.6 Scanning rule of moving components
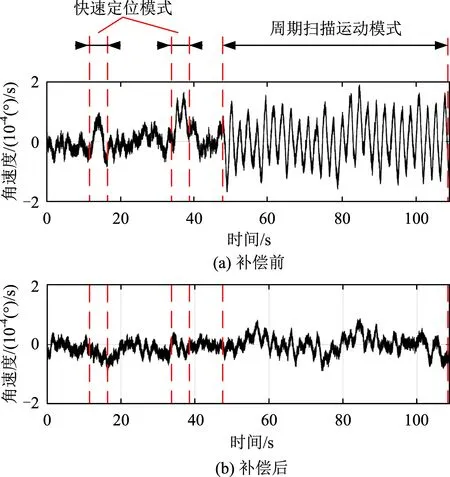
图7 姿态稳定度时域对比Fig.7 Comparison of attitude stability in time domain
为了进一步分析动力学补偿的效果,对姿态角速度数据进行傅里叶变换,在频域分析试验结果。如图8所示:动力学补偿开启前,姿态角速度在东西扫描镜工作频段(0.435 Hz)附近的响应幅值为7.88×10-5(°)/s;动力学补偿开启后,姿态角速度在扫描镜工作频段(0.435 Hz)附近的响应幅值降至1.51×10-5(°)/s。因此,动力学补偿开启后,补偿了80.8%的响应幅值,有效抵消了扫描镜运动对气浮台姿态稳定度的周期性影响,表明动力学补偿有效。

图8 姿态稳定度频域对比Fig.8 Comparison of attitude stability in frequency domain
2.3 图像运动补偿试验
GIIRS样机模拟GIIRS对地球成像,成像靶标为星点,图像光斑位置坐标通过重心法求解。
1)关闭图像运动补偿结果
3轴气浮台按式(1)的运动规律进行姿态导引,由GIIRS样机遥感图像中的目标点信息提取出的台体姿态与气浮台姿态测量信息对比,如图9所示。可以看出:图像移动轨迹与平台姿态角变化趋势一致,说明图像移动主要由台体姿态运动引起,成像误差不符合随机误差规律。经数据统计分析,99.73%的实际成像目标点与期望位置的距离在272.025 6 μrad内(图9中圆圈表示)。
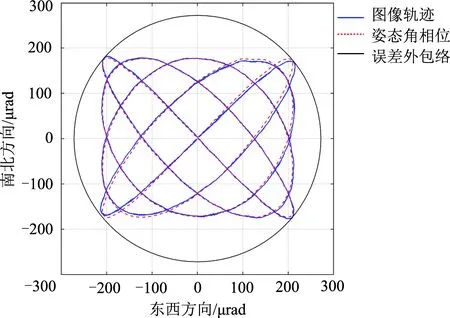
图9 关闭图像运动补偿时的成像目标轨迹Fig.9 Imaging target trajectory without IMC (image motion compensation)
2)开启图像运动补偿
开启图像运动补偿后,在图像运动补偿的作用下,GIIRS样机遥感图像中的目标并未随着台体的姿态运动发生移动,而是集中在一定区域范围内(见图10)。图11给出了成像误差分布特征,基本符合正态分布规律。采用正态分布3σ统计公式,得出补偿后实际成像目标点与期望位置的距离分布在13.782 0 μrad(3σ)内(图10中圆圈表示)。

图10 开启图像运动补偿后的成像目标轨迹Fig.10 Imaging target trajectory with IMC

图11 开启图像运动补偿后的成像误差分布特征Fig.11 Imaging error distribution with IMC
3 在轨试验结果
为了验证GIIRS图像导航配准技术的有效性,风云四号卫星发射入轨后开展了专项测试,通过在轨成像数据评估GIIRS图像导航配准效果。GIIRS对地凝视成像,30 s内对同一区域连续成像24帧,图像质量清晰,未受到星上动力学扰动的影响(见图12)。通过对多帧图像进行对比分析(见图13)可知:帧间配准误差小于0.12像元(6.7 μrad),与地面导航配准成像试验的结果相似,表明地面动力学补偿试验和图像运动补偿试验方法可有效验证GIIRS图像导航配准技术。
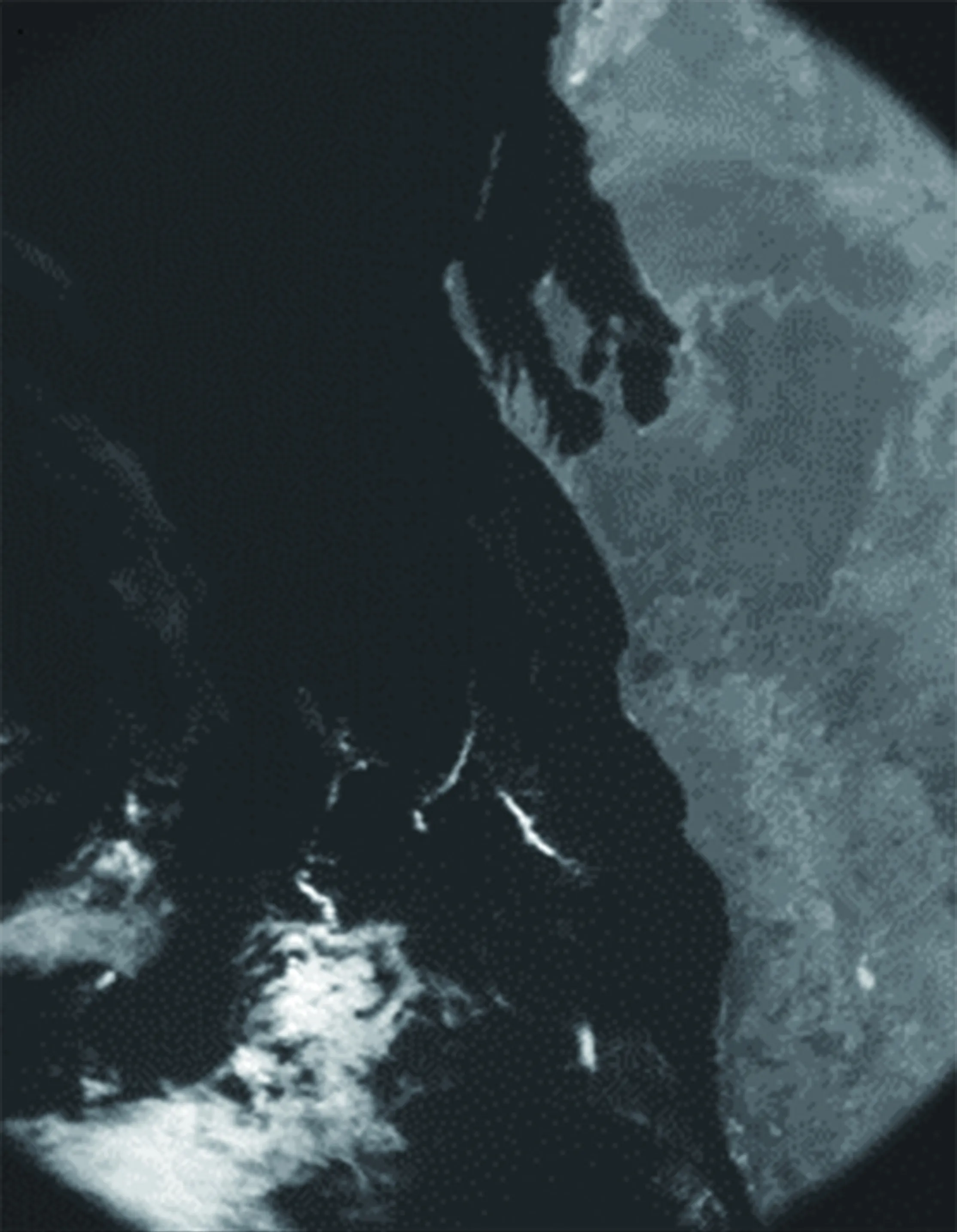
图12 GIIRS遥感图像Fig.12 An image taken by GIIRS

图13 图像配准结果Fig.13 Results of image registration
4 结论
为解决GIIRS图像导航配准技术的地面验证问题,本文提出了一种全物理仿真成像试验方法,完成了GIIRS的动力学补偿试验和图像运动补偿试验,得到结论如下。
(1)通过对成像试验误差分析,考虑GIIRS样机成像误差、图像处理误差和时间延时误差等误差项的影响,GIIRS成像试验引入的误差不超过5 μrad。
(2)成像试验结果表明:动力学补偿消除了扫描镜工作频段附近80.8%的响应幅值,姿态稳定度达到0.000 093 (°)/s;图像运动补偿消除了95%的GIIRS视线指向误差,图像配准精度达到13.782 0 μrad,均满足指标要求,证明了GIIRS图像导航配准技术的正确性。
(3)风云四号卫星发射后,GIIRS凝视成像期间的帧间图像配准精度达到0.12像元(6.3 μrad)。剔除地面成像试验误差后,星地结果基本一致,表明地面成像试验方法有效,对新技术的验证具有重要作用。