航天器百千瓦级分布式可重构电源系统设计
2021-03-03张明刘奕宏李海津张文佳张晓峰夏宁朱立颖穆浩刘震
张明 刘奕宏 李海津 张文佳 张晓峰 夏宁 朱立颖 穆浩 刘震
(北京空间飞行器总体设计部,北京 100094)
为适应我国未来航天器任务需求,电源系统将面临超高压大功率、高效智能、轻量化高集成、长寿命高可靠等挑战,新一代航天器平台的需求大力推动了电源系统向大功率、智能化和高可靠自主管理的方向发展。航天器功率需求在逐步提高,几乎每隔7年就增加1倍。为了满足功率需求的不断增加,同时提高系统效率并降低平台质量,航天器高压供电系统已经成为必然的选择。随着任务需求和技术的发展,航天器母线电压也越来越高,从最初28 V发展到50 V(国内为42 V),100 V,120 V。国内外在100 kW航天器电源系统方面的研究经验较少,系统拓扑、控制策略、高压大功率变换、多通道并网管理、高压元器件等方面亟需开展研究。
本文结合未来航天器任务需求和研制现状,对100 kW电源系统的任务特点、母线体制、系统拓扑、组成配置和系统控制策略等开展研究;针对高压大功率变换与安全控制技术、多通道能源智能管理和高压大功率器件等多项关键技术进行分析,可为后续高压大功率电源系统的设计提供参考。
1 电源系统设计分析
传统的分布式电源系统是指采用母线变换器将不稳定的源电压转化为一个稳定的母线电压,再通过多级直流/直流(DC/DC)变换器将母线电压转化为多种等级的电压,为负载供电。这类供配电系统是航天器、舰船、通信基站及大型计算机等用电设备的核心部件,它的性能和可靠性直接影响到各个用电设备乃至整个系统的运行情况。分布式电源系统是一种混合电源系统架构,概念来源于分布式可重构空间系统的研究,是空间电源系统发展的方向之一[1]。通常在实际应用中,系统的各个变换器模块单独工作时都是稳定的。
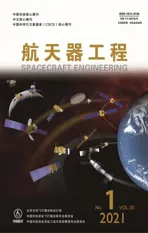
在地面应用中,分布式可重构电源系统概念及技术已被广泛应用,这类分布式电源是促进风能、光伏太阳能等分散式可再生能源的开发利用、提高清洁能源利用效率、解决农村地区电力供应问题的重要途径。分布式电源是电力系统的有机组成部分,是大电源的重要补充。各个国家根据地理特点发展着不同的分布式电源系统。类比到空间系统中,太阳电池阵列-蓄电池的供配电系统是主要能源来源方式,如图1所示。除此之外,燃料电池、核能、飞轮储能或各个独立的太阳电池阵列-蓄电池的供配电系统都可以作为分布式电源,作为模块化处理,以某一电压和功率等级母线作为主母线,通过能量调配和功率变换实现能源并网和结构重构。
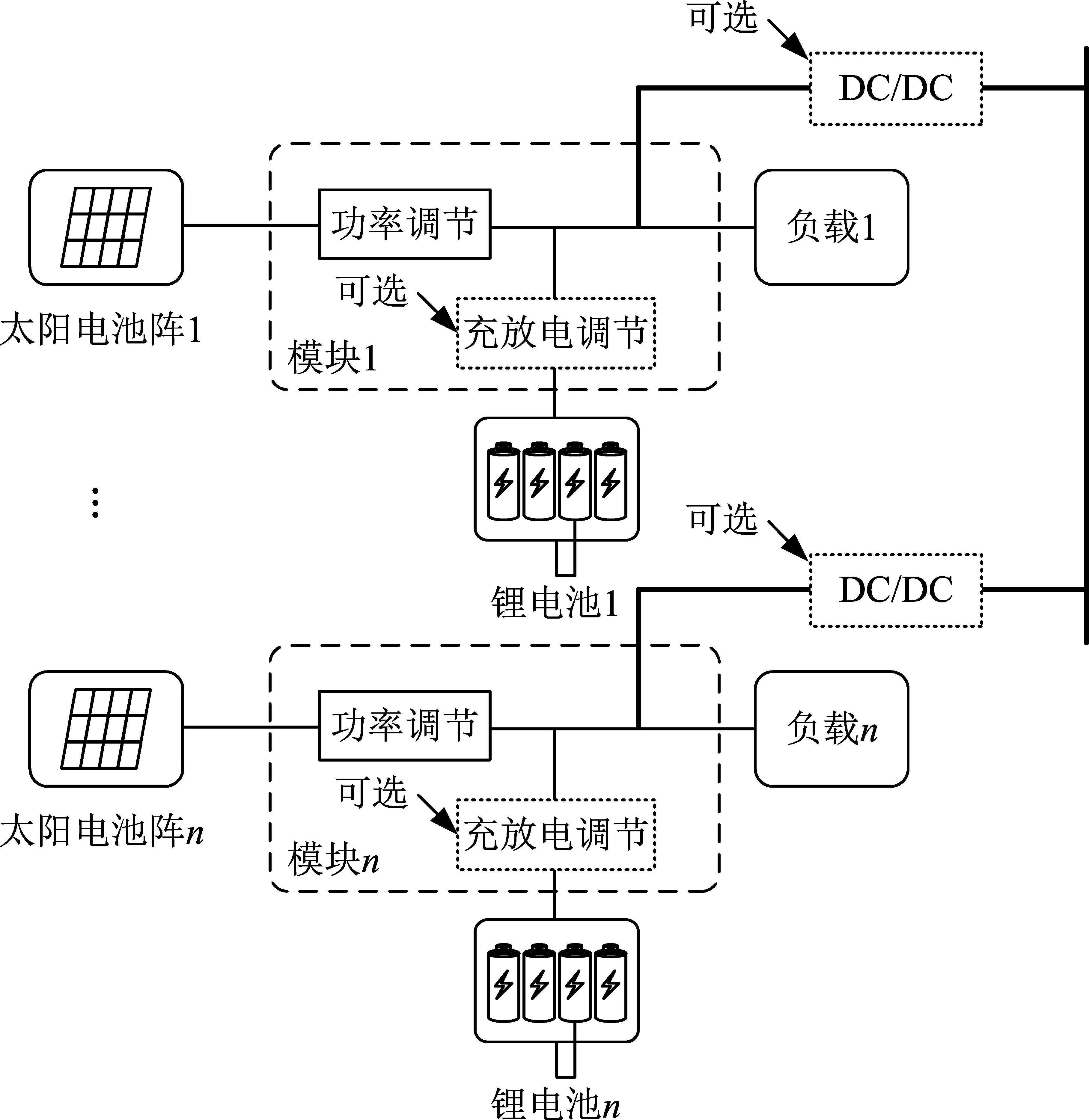
图1 分布式电源系统架构Fig.1 Distributed electrical power system architecture
本文提出的分布式可重构电源系统面向100 kW航天器,在标准化的光伏功率模块、储能功率模块和并网功率模块的基础上,设计一套完整的系统控制策略,可实现100 kW航天器电源系统稳定运行。
1.1 母线电压
通信卫星、民用高分辨合成孔径雷达(SAR)、空间太阳能电站、空间核动力航天器、大型在轨服务站等大功率航天器,对超大功率能源系统需求不断增强,50~100 kW级超大功率电源系统成为未来大功率航天器能源系统的发展趋势[2-3]。根据民用航天“十三五”技术预先研究项目指南,地球静止轨道(GEO)大功率高分辨率SAR卫星预计短期功率需求为50~80 kW;核动力航天器输出电功率为100 kW,设计母线电压为400~600 V;大功率电推进系统使用功率为20~50 kW;超大型可重构综合航天器平台总功率大于60 kW;太空发电站演示验证电站功率为兆瓦级,预计母线电压将达到5000 V[4-6]。
提高母线电压是降低线路损耗最有效的途径。以100 kW电源系统为例,当线路传输距离为30 m时,线路阻抗为10 mΩ,若采用100 V母线电压,线路传输电流为1000 A,线路损耗为10 kW,损耗比高达10%;若采用400 V母线电压,线路传输电流为250 A,线路损耗为625 W,线路损耗仅为0.6%。按照传统定义,200 V以上空间应用的电源系统为高压电源系统。表1列举了不同电压等级,传输20 kW和100 kW功率所需配电导线质量,可以看出,100 kW航天器的母线电压至少需要提高到200 V,电缆质量损失控制才能控制在可接受范围之内。
考虑到系统功率的可扩展性,结合高压功率器件的现有技术水平,本文采用400 V系统母线。
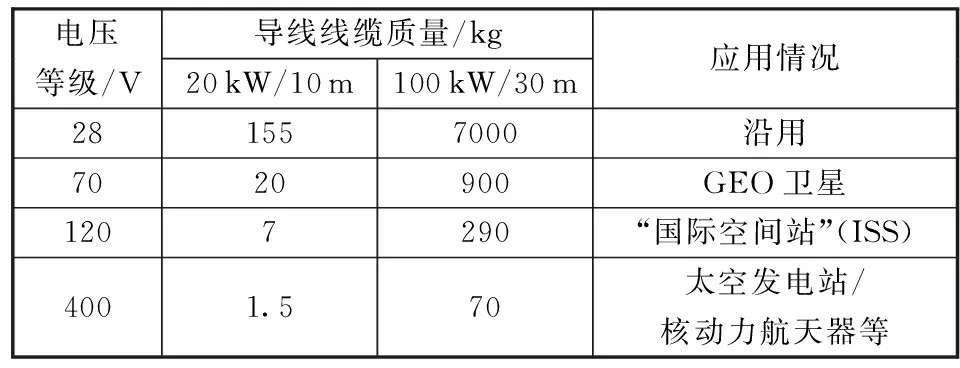
表1 配电铜导线线缆质量与功率、电压关系Table 1 Relationship among copper wire weight, power and voltage
1.2 电源架构与体制分析
按照负载特性分类,电源系统需要适应供电稳定的平台负载和峰值功率大、响应快的脉冲负载。平台负载功率需求稳定,对母线品质要求较高,通常设置一条全调节母线,以实现高效、精确的控制,其主要服务对象是航天器平台分系统,包括数管、测控、控制、推进、热控等;脉冲负载短期峰值功率大,要求母线输出阻抗小、响应快,载荷平台功率比需要越来越大,由目前的5∶1大幅度提升至20∶1,通常设置一条不调节脉冲母线,最大限度地满足大幅度、高频率和快响应的脉冲负载需求。母线体制有双独立母线体制和复合母线体制2种方式可选择。
(1)双独立母线体制(见图2),为2条母线配置独立的太阳电池阵、电源控制设备及蓄电池组,2条母线在航天器接地点单点共地,一条供给稳定负载,一条供给脉冲负载。双独立母线体制的优点是能够有效避免脉冲负载对稳定负载的干扰,在满足载荷设备供电需求的同时给平台设备提供较高供电品质的母线;但其缺点也相对明显,即电源系统的设备数量较多,体积质量相对较大,由于每条母线电源独立又都要留有一定的安全余量,导致母线能源利用率不高,功率模块通用性较差,成本较高,系统的可扩展性和可靠性不高。

图2 双独立母线体制电源系统拓扑Fig.2 Electrical power system topology of double independent bus system
(2)复合母线体制(见图3),使用不调节母线作为首次母线,为脉冲负载供电,不调节母线经变换器调节后输出全调节母线,为平台设备供电。这种供电体制可以较好地解决大功率SAR卫星使用双独立母线体制带来的矛盾。复合母线架构平台负载与有效载荷共用太阳电池阵、锂离子蓄电池组和功率调节模块,设备利用率高,质量、体积和成本占优势。复合母线体制满足了脉冲负载与平台的差异化供电需求,实现了太阳电池阵和蓄电池组的高效利用,供电系统拓扑简单。
图3 复合母线体制电源系统拓扑Fig.3 Electrical power system topology of compound bus system
1.3 能源管理
对100 kW或更大功率的航天器,由于太阳电池阵和蓄电池组规模显著扩大,传统太阳电池的统一布阵、统一主误差放大器(MEA)控制方式将受到严重限制,因此必须对太阳电池阵和蓄电池组的规模进行分解,研制通用的功率模块,依托分布式能源系统拓扑架构,采用能源综合管理系统,将各功率模块以“汇流”的方式实现功率集成,形成功率母线;同时,对用电负载进行分类和分区管理,确保实现电源供给的无缝切换。至于系统的扩展性,多个100 kW电源系统之间的能量共享与功率并网同样需要着重考虑。研制统一通用的功率调节模块,由太阳电池功率调节(光伏能)、蓄电池充放电调节(化学能)和并网控制调节(转换电能)3类功率模块共同组成100 kW电源系统;同时,对3种能源类型实施多通道能源统一管理,这是解决超大功率航天器能源管理的重要方式。
传统航天器多采用单层或双层的控制方式实现电源系统的调度和管理,通常的管理功能主要包括蓄电池管理、负载管理和各类保护等内容。传统的单层或双层控制方式面向单个航天器,而多个航天器间、多个舱段间能源共享的管理需求越来越复杂,单个航天器内部的分布式能源单元的种类和数量大幅度增加,多个能源单元之间安全、可靠的协同工作成为必须解决的问题,因此分布式大功率航天器能源管理的复杂度比传统航天器能源管理大幅度提升。100 kW电源系统采用分层控制的多通道能源管理策略,是实现分布式大功率航天器电源系统可靠、安全运行的必要保障。
2 电源系统设计
2.1 系统拓扑架构
100 kW电源系统配置全调节和不调节2种母线规格,设置一条全调节母线用于平台负载,不调节母线可根据蓄电池组和载荷设备的布局就近设置一条或多条。平台母线由多个光伏模块、储能模块和并网模块共同组成,通过高压配电模块向平台负载供电;不调节母线由蓄电池组直接引出,向不调节负载直接供电。图4为系统拓扑架构。

图4 系统拓扑架构Fig.4 System topology architecture
(1)光伏模块。光伏模块由太阳电池阵和主动功率调节器组成,主动功率调节器对太阳电池阵电能进行调节变换,以标准电压输出额定功率,多个完全相同的光伏模块并联组成100 kW电源系统。太阳电池阵输出100 V电压,主动功率调节器(APR)采用串联型MPPT拓扑,单个光伏模块设计输出功率10 kW/400 V,100 kW电源系统由10个光伏模块并联形成400 V光照期调节母线。
(2)储能模块。储能模块由蓄电池、充放电单元和蓄电池管理系统组成。其中:蓄电池负责能源的储存;充放电单元对蓄电池充放电进行管理,转变为平台母线电压;蓄电池管理系统负责监测与维护蓄电池组的健康状态,对蓄电池进行温控、均衡与故障管理。单个储能模块输出5 kW,100 kW电源系统默认配置1个储能模块。可根据实际需要进行多个储能模块并联,实现系统功率扩展。
(3)并网模块。并网模块负责2个100 kW电源系统之间的能量共享和传输,实现100 kW电源系统内部的平台母线和脉冲功率母线之间的能量共享。单个并网模块输出8 kW,功率双向输入输出。当本地100 kW电源系统功率输出不足时,可引入外部电源系统功率用于本地负载,外部电源系统出现功率缺口时,本地100 kW电源系统可对外提供输出功率。
(4)高压配电模块。高压配电模块负责对平台母线、脉冲功率母线的功率控制和分配,供电给调节和不调节负载。单个高压配电模块输出10路高压配电(单路400 V/5 A)。100 kW电源系统默认配置5个高压配电模块,可根据实际需要进行多模块并联,实现功率扩展和多级重构。
各种能源模块(光伏模块、储能模块、并网模块、高压配电模块)之间的能源调度管理由综合调度管理模块负责,各模块间的信息通过数据总线传递。
本文提出的100 kW电源系统架构共形成3条母线,具体如下。
(1)400 V全调节母线1条。400 V母线由本地的100 kW电源系统产生,由10个光伏模块、1个储能模块和1个并网模块并联组成。
(2)不调节脉冲母线2条,即A(270 V)和B(270 V)。A(270 V)由本地电源系统储能模块中的蓄电池组直接引出,B(270 V)由并网控制模块提供,能源来自于外部电源系统。2条母线不并联,由并网模块负责切换使用。
2.2 系统控制策略
系统采用分布式硬件控制+中央软件控制的联合控制策略。分布式硬件自主控制为主控制方式,当中央软件不介入系统管理时,分布式硬件系统能够可靠、安全运行;中央软件控制作为辅助方式,当分布式硬件出现故障时介入管理,确保系统可靠、安全。分布式硬件包括系统组成的各功率调节器,中央软件指系统中的综合调度管理模块。
分布式硬件控制为基础控制方式,具有控制快速、稳定性高的优点,广泛应用于微电网的能量控制中[7-10]。系统中的所有功率调节模块(APR、分布式可重构双向功率变换器(DRBC)、蓄电池充电调节器(BCR)均是独立控制的,各功率调节模块全部采用下垂控制方式,根据设定的下垂曲线进行调节。下垂控制中的母线电压参考值不是固定值,而是随输出功率变化而波动。
系统分为4个控制域,分别为APR域、DRBC域、BCR域和蓄电池放电调节器(BDR)域,采用母线电压Vbus来区分4个域之间的界限。相邻的2个域之间设计域间死区,当功率输出与需求平衡时所对应的Vbus正好处在域和域之间的切换点时,可以防止域和域之间来回切换,从而避免因此带来的母线波动。域的划分如图5所示。
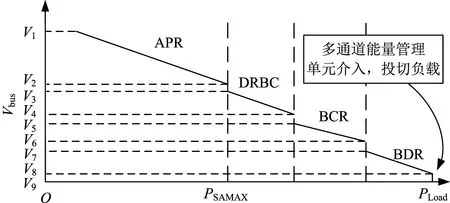
注:V1和V9分别为母线电压的最大值和最小值,V2~V8是两者之间的取值;PSAMAX为10个APR输出功率的最大值;Pload为负载功率。
功率模块自身的下垂控制不依赖于通信线,可自主实现功率平衡,缺点是各功率调节器都是电压源,空载输出电压或输出阻抗的一点偏差,都可以造成输出电流的较大偏差。系统的多个功率模块并联输出时,功率调节模块之间存在性能差异,会导致各模块输出电流不均衡,输出电流较大的模块器件温度较高,从而使输出功率大的模块寿命缩短,降低系统的可靠性,因此必须加以均流控制,克服变换器参数的偏差。均流功能由中央管理软件(综合调度管理模块)负责,可提高系统控制精度,增加灵活性。系统对均流的动态响应要求不高,通过数据总线通信做时间离散的自适应均流,该控制方法无需添加额外的均流母线和相应的电路,抗扰能力和可靠性都优于传统的模拟均流方式。
2.3 关键技术
(1)高压大功率变换控制技术。光伏模块中的APR和储能模块中的BCDR,都涉及到400 V母线的大功率变换。APR采用串联型MPPT全调节拓扑,将太阳电池阵输出的100 V变换为母线400 V。国内的临近空间任务中已经应用了基于330 V母线的最大功率调节技术,功率等级为20 kW,其太阳电池阵工作点电压范围为165~252 V。但在空间环境应用,还需要解决400 V高压器件选择和提升效率、降低功率损耗等难题。大功率高压器件需要通过碳化硅(SiC)器件专题研究来解决,设计高效的高压功率电路拓扑,降低开关管应力和损耗,降低热耗,提升效率。
(2)多通道能源管理技术。开展多通道能量管理软件研制,基于分层管理原则,对100 kW电源系统各组成部分进行动态监控和日常管理。多通道能源管理对APR,BCDR,PDU,DRBC等功率模块进行能量调度,通过健康状态监测实现故障诊断和隔离。多通道能量管理单元可对各功率模块的工作状态、电压、电流、温度等参数进行采集和监测,对各模块的工作状态和工作模式进行控制,包括APR模块的最大功率点计算、BCDR模块电池充放电管理、DRBC模块的母线重构和模式切换。当某个模块发生故障时,多通道能量管理单元可自动切断故障模块,避免故障蔓延[11]。多通道智能管理的主要内容包括智能电量管理、健康管理、系统重构管理等。
(3)高压大功率元器件技术。以SiC和氮化镓(GaN)为代表的新一代半导体材料,拥有高频高效、耐高压、耐高温等特性,尤其适合应用在航天领域。其中:SiC材料起步较早,技术较为成熟,目前在民用领域的应用正在快速发展,但在航天领域还没有得到应用。目前,SiC功率整流二极管和功率管的研究已经趋于成熟,国产SiC肖特基二极管的商业产品达到600 V/10 A、1200 V/20 A的水平;SiC JBS二极管能够实现的正向电流可以在1.8 V达到35 A,比导通电阻为2.41 mΩ·cm2,并联封装可使所制器件在3 V时达到100 A正向电流,反向击穿电压达到1600 V,反向恢复时间为20~150 ns。
(4)系统可靠性、安全性技术。系统各组成模块及关键元器件的空间环境适应性需要重点研究,开展相关的环境验证试验;系统的故障诊断、隔离与恢复能力将成为重点,综合调度管理模块的自主健康管理和系统重构管理负责系统出现故障时的快速处理,确保系统安全;400 V母线电压采用高压隔离和防护是确保产品和人员安全、可靠的关键。
2.4 优势与特点
本文提出的100 kW电源系统拓扑,相比传统的航天器电源系统,将基于通用功率调节模块的下垂控制方式作为主控制策略,配置了综合能源管理模块,能确保系统的性能和可靠性,提升系统配置的灵活性。这套系统拓扑架构的主要优势和特点如下。
(1)系统架构灵活。分布式架构能提高光伏电池的布片率和布片灵活性,支持储能设备升级为电源包,提高能源利用率和系统功率密度。分布式架构可为电源模块的模块化设计提供基础,针对不同航天器任务的可复用程度高,可实现商用现货采购。采用的标准模块也可通过软件定义适应不同任务及复杂应用场合,极大提升大功率电源系统的设计效率。采用数字智能化技术使得模块具有高度的柔性设计,为用户提供系统后续升级、重组、拓展的能力。
(2)系统功率扩展性好。通过增加光伏模块或储能模块的数量来增加系统输出功率,通过增加并网模块的数量或功率等级来增加本地电源系统与外部电源系统间的共享功率,通过增加配电模块的数量来适应负载数量的增加,缓解母线电压持续提升的迫切程度。
(3)系统可靠性高。系统中包含多个发电模块、多个储能模块、多个配电模块,各个模块互为冗余,能提高整个系统供电的可靠性。由于系统中各模块采用下垂控制,上位机故障时系统中各模块仍能正常工作,为负载提供功率。此外,系统具备健康管理及可重构能力,出现在轨故障时,可将故障模块从系统中切除,避免故障蔓延。另外,可根据系统运行状态对系统架构进行重构,满足负载的供电需求。
(4)适用广泛的多特性双母线。设置平台母线和脉冲功率母线2条不同特性的母线,适用于航天器多种负载特性,适应性强,应用广泛。平台母线主要提供给各类超大型综合航天器平台负载,脉冲功率母线主要应用于大功率高分辨率SAR卫星、空间攻防平台等航天装备。根据需要设置多条独立的平台母线和脉冲功率母线,通过并网控制和配电汇流,显著提升在轨故障容限能力,增加系统可靠性。
(5)系统管理智能化程度高。综合调度管理模块负责整个系统的能量调度,具有较高的灵活性,可实现系统的智能管理,自主识别与处理部分故障,提升系统的故障容限能力。
3 系统仿真验证
为验证本文提出的100 kW电源系统设计的可行性,在PSIM仿真软件中搭建了系统模型,对系统在APR域、DRBC域、BCR域、BDR域及域间切换时的系统运行情况进行仿真,同时对典型故障模式下的系统可靠性进行初步分析。搭建的仿真模型中包括2个APR、1个DRBC和1个BCDR共4个功率模块,直流母线电压设置为400 V。域内母线电压按照APR域403.0~405.0 V,DRBC域401.7~403.0 V,BCDR域400.0~401.7 V来划分。具体的系统及模块的仿真参数见表2。
图6为仿真波形。在图6中:S1段表示系统工作在APR域,2个APR模块为负载提供功率,BCDR和DRBC模块不提供负载功率;S2段表示并网控制器DRBC对外输出功率2 kW,此时系统仍工作在APR域,由APR模块提供负载功率及并网输出功率;S3段与S1段相同;S4段表示负载增加8 kW,此时系统工作在DRBC域,2个APR模块工作在最大功率模式,单模块输出功率8 kW,合计16 kW,DRBC输入5 kW,BCDR不输出功率;S5段表示负载增加2 kW,此时系统工作在DRBC域,DRBC输入7 kW,2个APR模块提供最大功率16 kW;S6段与S4段相同;S7段表示负载增加6 kW,此时系统工作在BCDR域,2个APR模块提供最大功率16 kW,1个DRBC模块提供最大输入功率8 kW,1个BCDR模块提供放电功率3 kW。从各个工作域的切换可以看出:系统母线电压变化范围始终小于0.5%,工作状态稳定。表3为系统工作状态。
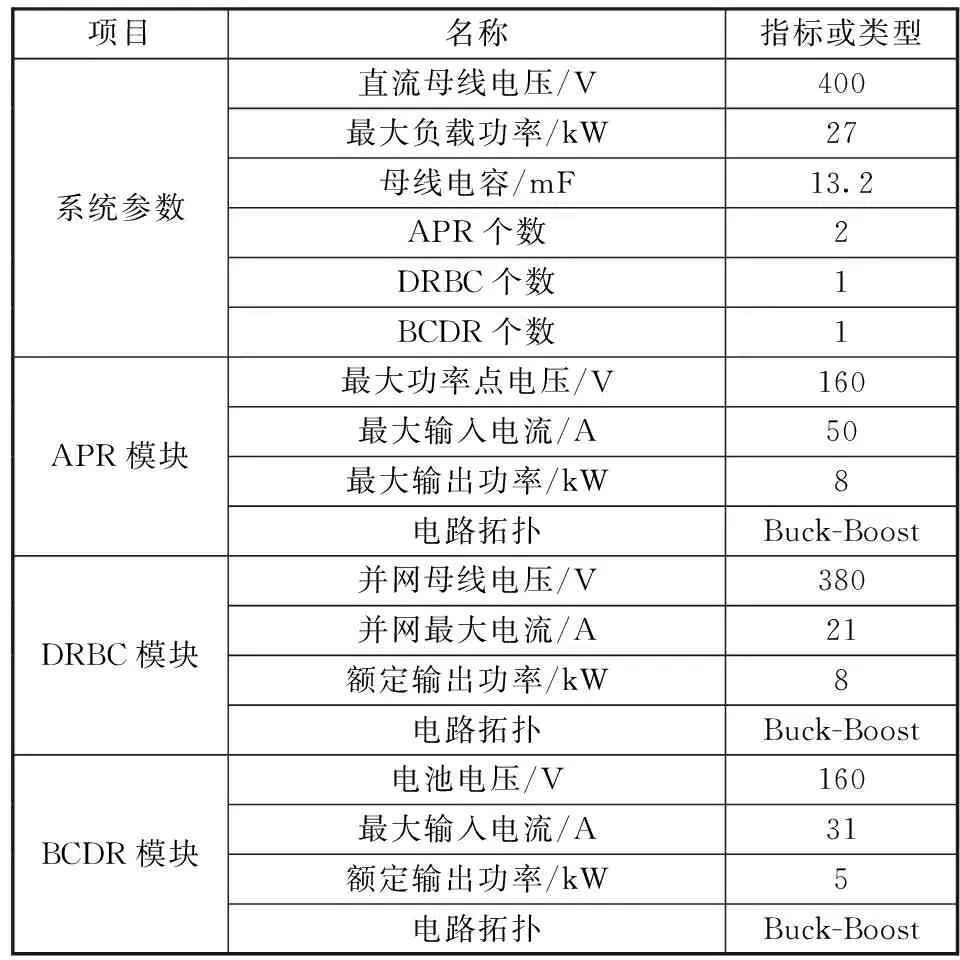
表2 仿真参数Table 2 Simulation parameters

图6 系统各工作模式仿真波形Fig.6 System simulation waveforms of each working mode

表3 系统工作状态Table 3 System operation states
为了验证系统控制策略的鲁棒性,对1个APR模块发生故障时系统的工作情况进行仿真,仿真波形如图7所示。系统工作在APR域,2个APR模块提供负载功率13 kW,在0.5 s时,APR1模块发生故障,输出功率变为0。母线电压从403.6 V下降到402.8 V,系统进入DRBC域,APR2提供最大功率8 kW,DRBC提供剩余的5 kW;在1.0 s时,负载增加到21 kW;在1.2 s时,增加到23 kW;在1.3 s时又下降到21 kW。负载增加变化过程中母线电压变化范围始终小于0.5%,验证了系统在在单个模块发生故障后仍能继续为负载稳定供电,无需通信参与,控制策略具有较高的鲁棒性。
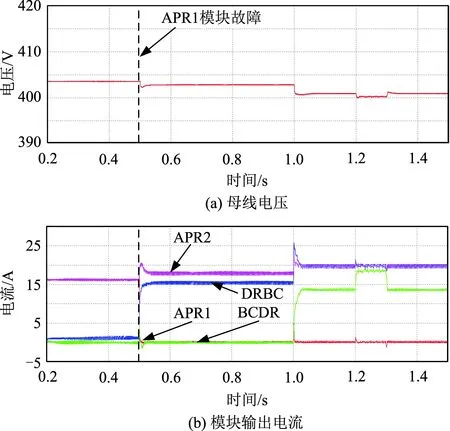
图7 APR1模块故障时的系统仿真波形Fig.7 System simulation waveforms with APR1 module failed
4 结束语
未来新一代航天器平台的需求推动了航天器电源系统向大功率、智能化和高可靠自主管理的方向发展。航天器任务对超大功率能源系统需求不断增强,50~100 kW超大功率电源系统成为未来大功率航天器能源系统的发展趋势。本文结合任务需求和研制现状,对100 kW电源系统的系统架构、母线体制、配置组成和系统控制策略等开展研究;结合现有研制基础,对大功率电源系统设计与研制的关键技术进行了梳理和分析,并采用了PSIM软件对系统进行建模和仿真,验证了技术的可行性,可为后续高压大功率电源系统的设计提供技术参考。