一种凸极式磁阻型球形电机的结构设计
2021-03-02王群京乔元忠鞠鲁峰周睿何竞雄
王群京,乔元忠,鞠鲁峰,周睿,何竞雄
(1.安徽大学 电气工程与自动化学院,合肥 230601;2.安徽大学 高节能电机及控制技术国家地方联合工程实验室,合肥 230601;3.安徽大学 工业节电与电能质量控制协同创新中心,合肥 230601)
0 引 言
对于传统的单轴电机而言,完成多自由度动作需要多台电机进行组合控制,其机械系统效率低下,体积过大,控制繁琐[1]。球形电机由于自身的结构特性可单独完成三自由度运动,引起了人们的关注和研究,体积小、响应速度快、定位精确的优点使得其在机器人、摄像头、汽车航天等领域拥有广泛的应用前景[2]。
近年来,国内外学者对球形电机进行了大量的研究,并且设计分析了不同形式的球形电机。文献[3]提出了永磁球形步进电动机,该电机转子结构上均匀分布了40个永磁体,定子线圈共有16个,不考虑输出轴的情况下,可以实现全角度旋转,缺点是体积较大。文献[4]基于定转子磁场分析设计出一种新型永磁球形电机,转子球表面的40个永磁体NS极交替分布,增大了电机的运动角,提高了电机输出转矩。文献[5]把球形电机应用到了保形打印上(喷射印花机),结合底座三轴运动可以实现6自由度运动,并且详细探讨了球形电机应用于保形打印的可行性。文献[6]首次将Halbach阵列的永磁体引入到球形电机中,并分别采用解析法和有限元法对电机的磁场进行分析,该电机气隙磁密近正弦分布。文献[7]采用双相正交绕组设计了一种新颖的壳式感应球形电机,并使用解析法和有限元法进行了磁场分析,该电机可以真正意义上不受结构限制实现三自由度旋转。
为解决永磁类球形电机中出现的转矩小、控制难的问题[8-9],本文提出了一种新型磁阻型球形电机结构。电机中转子结构得到了简化,方便了磁场分析,为进一步精确确定电机参数、控制球形电机运动提供了理论依据。仿真结果证明了该设计方法是有效的和可行的。本文提出的电机的不同之处和显著特点在于:1)转子采用凸极式结构,减少了漏磁,并且将转子中心掏空,减少了转子23.59%的转动惯量,使得电机有良好的动态响应;2)定子线圈含铁心,降低了磁路中的磁势消耗,提升了电机整体的动态性能,增加了转矩输出;3)电机的电磁转矩与磁路中的磁阻大小相关,因此电磁转矩方向与输入电流的方向无关,而与转子位置有关。
1 磁阻型球形电机结构与运动原理
1.1 电机结构
新型磁阻型球形电机的基本结构如图1所示,电机本体由定子(球壳与定子铁心)、转子、线圈、转轴四部分组成。电机的定子由2个电工纯铁材料制成的球壳合并而成,铁心材料同样使用电工纯铁,铁心末端的极靴既可以增加定转子相对接触的有效面积,又可以防止线圈脱落。使用24个通电线圈可以满足球形电机自旋运动、偏转运动及侧旋运动等复杂运动的要求,通电线圈分上中下3层,每层均匀分布8个,硅钢片叠制成的转子包裹于PC材料制成的轻质薄壳中。转子齿每隔60°对称分布,共有6个。

图1 新型磁阻型球形电机结构
球形电机的结构特殊,对加工性能与制造工艺的要求较高,因此在本体设计阶段必须保证现有的生产加工方式和工艺水平符合性能要求。根据文献[10],得知转子结构可以通过冲片叠压的方式制成,保证转子齿表面整齐平滑,尽可能降低由于结构上的不对称带来的气隙磁场畸变。本文中的球形电机绕组设计采用集中绕组的方案,便于线圈的绕制和绕组的安装,查阅文献[11],考虑电磁线的安全载流量为8 A/mm2,为满足电机转动所需的电磁力矩输出要求,满足电机绕组与槽间的隔离绝缘要求,电磁线采用线径为0.48 mm的漆包线。
1.2 自旋运动原理
磁阻型球形电机的绕组共有3层,目前,实现自旋运动的通电线圈组合方式有单个线圈、单对线圈、3个线圈等等,详细内容见文献[12]。为方便分析电机多自由度运动原理,将电机运动分解为自旋运动与倾斜运动进行描述。关于自旋运动,取电机横剖面的定转子进行概述。
如图2(a)所示,在只考虑通电处于0°纬度角(使用类似地球的坐标系统)位置的线圈时,球形电机的自旋运动与8/6极开关磁阻电机运行原理相同,自旋运动的步进角[13]为
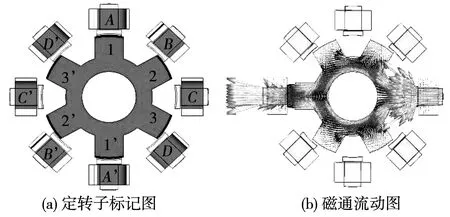
图2 自旋运动示意图
βstep=τr/m=360°/(mNr)。
(1)
式中:Nr为转子极数;m为定子相数;τr为转子极距。
图2中的定子相A-A’与转子齿1-1’重合(中心线对齐),此时A-A’-1-1’这条直线上磁阻最小,磁通的方向以此线为主流动,若给A-A’相通电,1-1’转子齿受到径向的电磁力,而切向电磁力可以视为0,转子因而可以达到“自锁”的状态。反观2-2’齿与B-B’相之间有15°的角度差,3-3’齿与D-D’相亦有15°的角度差,若仅给B-B’相通电,则转子齿2-2’受到切向磁拉力逆时针向B-B’转动。以图3为起始位置,顺序循环按照相序B-B’,C-C’,D-D’,A-A’通电,则电机产生逆时针方向的自旋运动;相反,若顺序循环按照相序D-D’,C-C’,B-B’,A-A’通电,电机产生顺时针自旋运动。
1.3 倾斜运动原理
磁阻型球形电机定转子结构关于俯仰运动与偏航运动高度对称,因此,可以通过分析转子单对齿以及纵剖面下的3组线圈的通电作用,了解电机倾斜运动原理。与自旋运动不同,在完成倾斜运动时,转子只有两极,因此,定子相间的纬度角越大,电机对完成倾斜运动时的启动转矩的要求越高。本文设计的定子相间纬度角为33°,既符合电机完成倾斜运动的结构需求,又可以为转子线圈留下足够的工程余量。
图3(a)为0°经度角时的剖面图,转子齿与定子F-F’相对齐(中心线重合),此时磁通主要在F-4-4’-F’轴线上流动。同样,若此时给F-F’相通电,转子仅受径向磁拉力可以达到“自锁”的状态。仅通电G-G’相,转子受到切向磁拉力顺时针偏转。此种通电方法的步进角αstep与定子相经度角相同为33°。为减小步距角,可以使用两对线圈的通电方法,具体的开环通电相序如下:如图3(a)定转子磁极对齐为起始位置,同时通电F-F’,G-G’两相,在转子4-4’偏转经度角略小于16.5°时,接着断开F-F’相,转子继续顺时针偏转。这种方法减少了一半的步距角,但也相应减少了电机关于倾斜运动的输出转矩。

图3 倾斜运动示意图
从理论上可以通过多对线圈的通电方法,完成电机的倾斜运动,但多对线圈与转子间的电磁场计算更为复杂,考虑到通电线圈的激励磁场之间存在相互影响,限于硬件设备条件有限,本文暂不分析多种通电方法下的倾斜运动。
2 磁阻型球形电机建模
2.1 数学模型
目前,关于球形电机常用的转矩建模的方法有洛伦兹力法、虚位移法以及麦克斯韦张量法[14-16]。由上文可知本文提出的磁阻型球形电机的工作原理与永磁式球形电机完全不同,参考文献[17],类似于开关磁阻电机的线性建模,基于能量法对球形电机进行数学建模。忽略通电线圈间的磁场影响,建立磁阻型球形电机最小模型,图4为单线圈和转子组合模型。
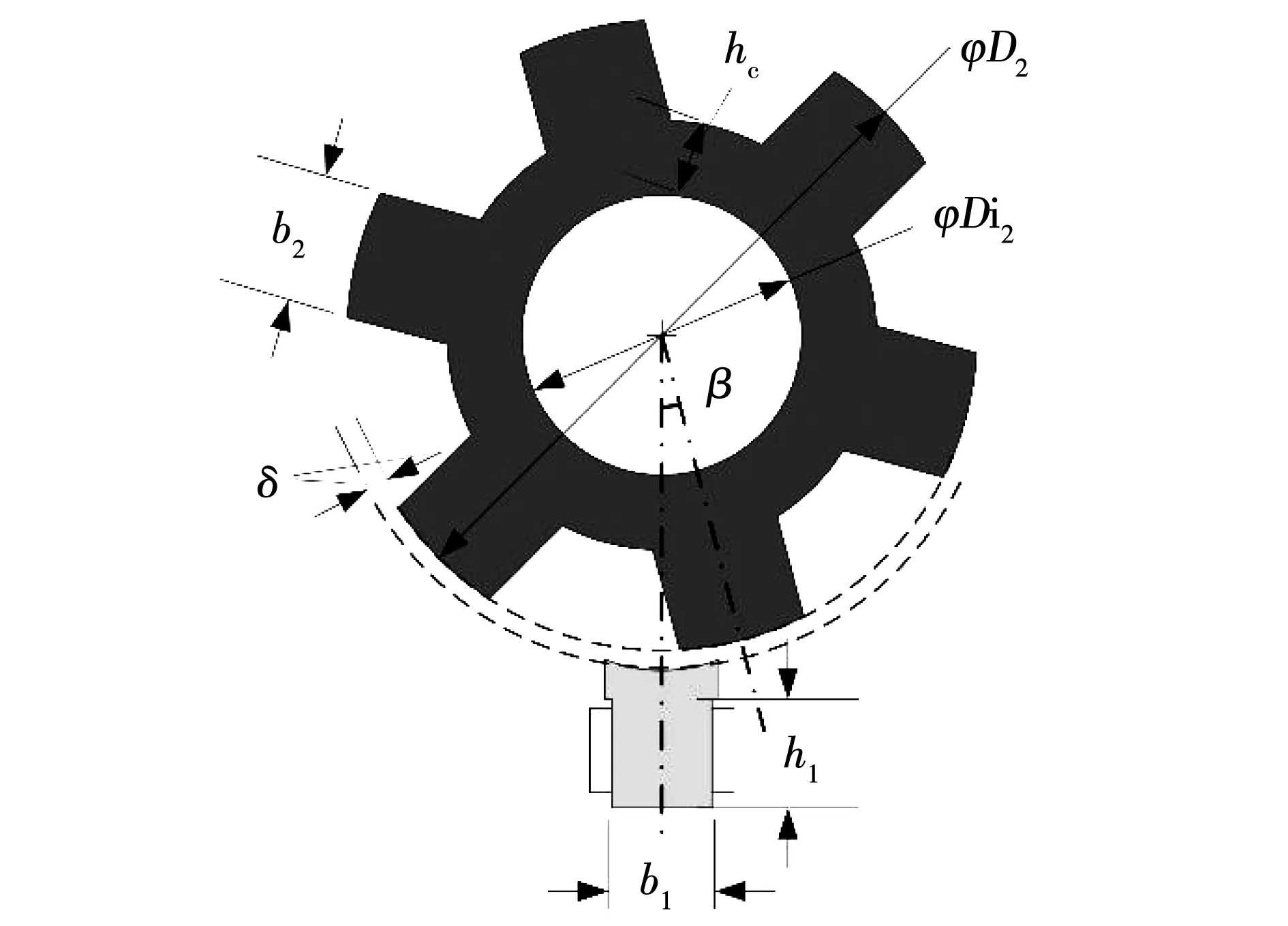
图4 单线圈最小模型示意图
与传统旋转电机不同,球形电机不仅在空间运动方面增加了2个自由度,而且转子位置与姿态也会影响电机的动静态性能。为了便于分析和描述球形电机的运动特性,如图5建立定转子坐标系,定子固定坐标系为XYZ直角坐标系,转子动坐标系为αβγ旋转坐标系,其中β角为转子绕Ζ轴逆时针旋转角度,α角为转子从XOY平面逆时针旋转角度,γ角为转子逆时针自旋角度。

图5 定转子坐标系
在基本数学建模之前,假设模型满足以下条件:
1)忽略集肤效应和边缘效应;
2)忽略漏磁通;
3)忽略定子铁心与定子磁轭处磁饱和;
4)定转子径向与轴向的相对气隙均匀;
5)转子绕三轴旋转规定逆时针方向为正;
6)定子铁心和转子体磁导率无穷大。
本文提出的电机模型共有24个通电线圈,取单线圈进行分析,电压方程为
(2)
忽略定子绕组上的电阻Rk的情况下,式(2)可以变化为
(3)

在球形电机中,ψk为关于绕组电流和转子位置角的函数,表达式为
ψk=ψk(i1,i2,i3,…i24,β,α)。
(4)
单个通电线圈导通时,忽略相间电感,磁链方程可以表示为
ψk=Lk(ik,β,α)ik。
(5)
其中α为转子倾斜位置角,即倾斜方向下转子中心线与定子相中心线夹角。
根据文献[15],球形电机采用笛卡尔方法建立的多刚体动力学方程组为:
(6)
(7)
(8)
(9)
(10)

磁阻型球形电机转子体关于x、y方向结构对称,转动惯量一致,在z方向的转动惯量则偏大,具体数值如表1所示。

表1 球形电机转子体转动惯量J
基于能量法推导磁阻型球形电机的机电联系方程为
dWe=dWm+dWmec。
(11)
其中:
(12)
式中:dWe为dt时间内输入电机中的净电能;dWm为dt时间内磁场吸收的总能量;dWmec表示为dt时间内机械能的增加量;在式(12)中的磁场储能Wm和磁链ψ都为线圈电流i和位移x的函数;将式(12)代入式(11)中,可以得到
(13)
由于di和dx相互独立,因此满足(13)式时di和dx系数皆为0,所以
(14)
在旋转电机中,位移∂x可以表示为∂x=r∂θ,将其代入式(14)可得
(15)

根据本节假设条件1)和3),球形电机的电感模型为线性化模型,转矩可以根据电感关于角位移的微分求得:
(16)
在安匝数一定的情况下,电感L的取值可以通过等效磁阻求解,即
(17)
式中:N为线圈匝数;R为气隙磁阻;μ0为真空磁导率;Ag为等效气隙截面积;δ为气隙长度。
2.2 电机有限元建模
由于电机的电感模型在三维场域的高度非线性,电机的动静态求解和磁场分析十分复杂,基于建立的电机数学模型,本文采用有限元法完成数值求解。Maxwell软件中,分析三维电磁场域时有限元分析的剖分单元为三维单元,软件使用的单元为四面体。文献[18]在软件中对磁阻型球形电机进行建模,手动剖分电机模型,得到207 822个最小网格,由图6可以看出电机的剖分足够精密,仿真得出的结果将更加精确。

图6 电机剖分图
本文基于Maxwell 3D的静磁场仿真计算是在一对线圈通电的条件下进行分析,以数值解的形式验证上述基本数学模型,并通过曲线拟合的方法表征电机的矩角特性和电感曲线,对电机的动静态性能起着重要作用。Maxwell软件提供虚位移法和洛伦兹力法对3D模型进行磁场分析,本文基于虚位移法对电机进行电磁仿真。磁阻型电机有限元建模参数如表2所示。

表2 球形电机结构参数
取球形电机中2种基本运动—自旋运动和倾斜运动进行静磁场计算,仿真结果如图7所示。

图7 电感、转矩—位置角特性曲线
其中(a)和(b)图分别表示2种运动情况下的相电感曲线,(c)和(d)图分别表示自旋转矩和倾斜转矩。从图(a)和图(b)可知相电感曲线关于定转子对齐位置对称分布,由于极靴的存在,电感线性变化区域较宽。从图(c)和图(d)可知,自旋运动下的有效转矩区域为β=5°~25°,倾斜运动下的有效转矩区域为α=5°~25°。分析静态下的相电感曲线和矩角特性可以更加清楚的了解球形运动的原理,并为电机开环和闭环运行做好理论基础。
3 电机模型结构设计
在电机设计的过程中,考虑到电机参数对电机性能的影响,限于篇幅,本文取5个主要参数进行仿真分析。针对球形电机中2种典型运动—自旋运动与倾斜运动,以电机的输出转矩、气隙磁密和定子磁轭的磁密大小为目标,分析不同参数的影响效果。转子初始位置如图3(a)和图4所示,计算长度为单对通电线圈条件下一个步进角。
3.1 定子形状
设计电机之初,提出了2种形状的定子外壳,图1(a)和图1(b)分别表明了球壳型定子与骨架型定子的结构。分析不同形状的定子结构对磁场的影响,可以得出在电磁线圈通电的情况下,磁通的流动方向因为定子磁轭结构的不同而不同。在磁路中,磁通总是寻找最小磁阻的位置进行流通,因此在倾斜运动时,球壳型的定子结构中磁通流动更加均匀理想,电机的效率将更高。
经过有限元计算,由图8可以得出,无论是自旋运动还是倾斜运动,就电磁转矩大小而言,球壳型电机的优势更大。气隙磁密与定子磁轭的磁密影响如图9所示,图9(a)~图9(c)图分别表示骨架型电机的气隙磁密与自旋、倾斜运动状态下的轭部磁密,图9(d)~图9(f)则表示球壳型电机。对比分析,骨架型结构铁心磁密高过1.8 T,更容易工作在磁饱和状态。多重比较,最终选择球壳型结构。

图8 单步进角矩角特性曲线

图9 气隙磁密与磁轭磁密分布图
3.2 极靴尺寸
在电机定子铁心末端添加极靴可以增大定转子极相对接触的面积,增大有效转矩的作用范围。取0.5~2.5 mm的极靴高度hj进行计算,如图10,极靴的高度对输出转矩的幅值影响不大。对气隙磁密、定子轭部磁密的影响也在5%以内。因此在电机本体设计中,另外考虑到防止线圈滑落的作用和方便电机加工,如表2所示选择2 mm高度的极靴进行设计。

图10 单步进角矩角特性曲线
3.3 线圈安匝数
由文献[14-16、19]可以得出,在开环通电一对线圈且安匝数为2 400 A的情况下,永磁球形电机的输出转矩在150~250 m·Nm范围。相比较而言,观察图12可知,在新型磁阻型球形电机上使用700 A的安匝数,在减少近一倍安匝数的情况下,电机的输出转矩依然可以达到250 m·Nm,相比较同等尺寸的永磁球形电机,至少提高了74%的电磁转矩。

图12 单步进角矩角特性曲线
图13表明安匝数在0~850 A范围内电机铁心工作在未饱和区域,通电线圈超过850 A安匝数,应考虑铁心饱和对电机性能的影响及电机效率的下降。

图13 气隙磁密与磁轭磁密分布图
3.4 气隙长度
球形电机的有效电磁转矩直接受气隙磁密径向分量的基波幅值影响[20]。假设磁通全部在径向上通过气隙,定子极靴与转子之间的气隙将直接影响电机电磁转矩的大小。随着气隙长度δ的增大,磁路磁势消耗增大,输出转矩减小。

图11 气隙磁密与磁轭磁密分布图
取气隙长度δ范围为0.5~2 mm的电机模型进行分析计算,其对2种典型运动的输出转矩影响如图14所示。由于极靴的存在,气隙长度对转矩的影响集中在β=0~7°,α=6~24°的范围内,在δ=0.5 mm时,转矩波动比较明显。由图15可知,气隙长度对气隙磁密的影响比较明显,式(17)表明气隙长度在恒定安匝数条件下与电感成反比,即与磁链、磁密成反比,而自旋与倾斜状态下的磁轭密度分布趋势大致相同。
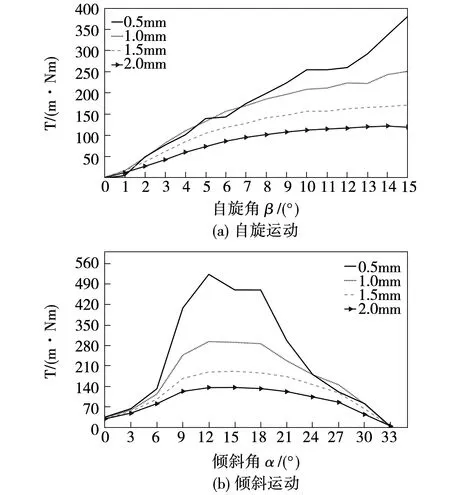
图14 单步进角矩角特性曲线

图15 气隙磁密与磁轭磁密分布图
3.5 定转子尺寸
为简化电磁场分析,电机的定子磁极结构设计关于XOY面与XOZ面均匀对称。取定子磁极宽度b1(长度l1)范围8~10 mm进行计算,在自旋运动的换向位置角附近和倾斜运动初始位置处,定子磁极宽度对输出转矩的影响很小,如图16所示,这是因为磁阻型球形电机极靴的存在,增大了定转子相对接触面积,而在转子运动一定角度后,空间位置的改变使得定子磁极宽度对输出转矩的影响更为明显。图17是转子磁极宽度b2对电机转矩的影响曲线。随着转子宽度的增大,自旋运动的输出转矩得到提高,倾斜运动的启动转矩也有所提升。另一方面,需要考虑的是,转子的转动惯量也会增加,相应减弱了电机的负载能力。

图16 单步进角矩角特性曲线
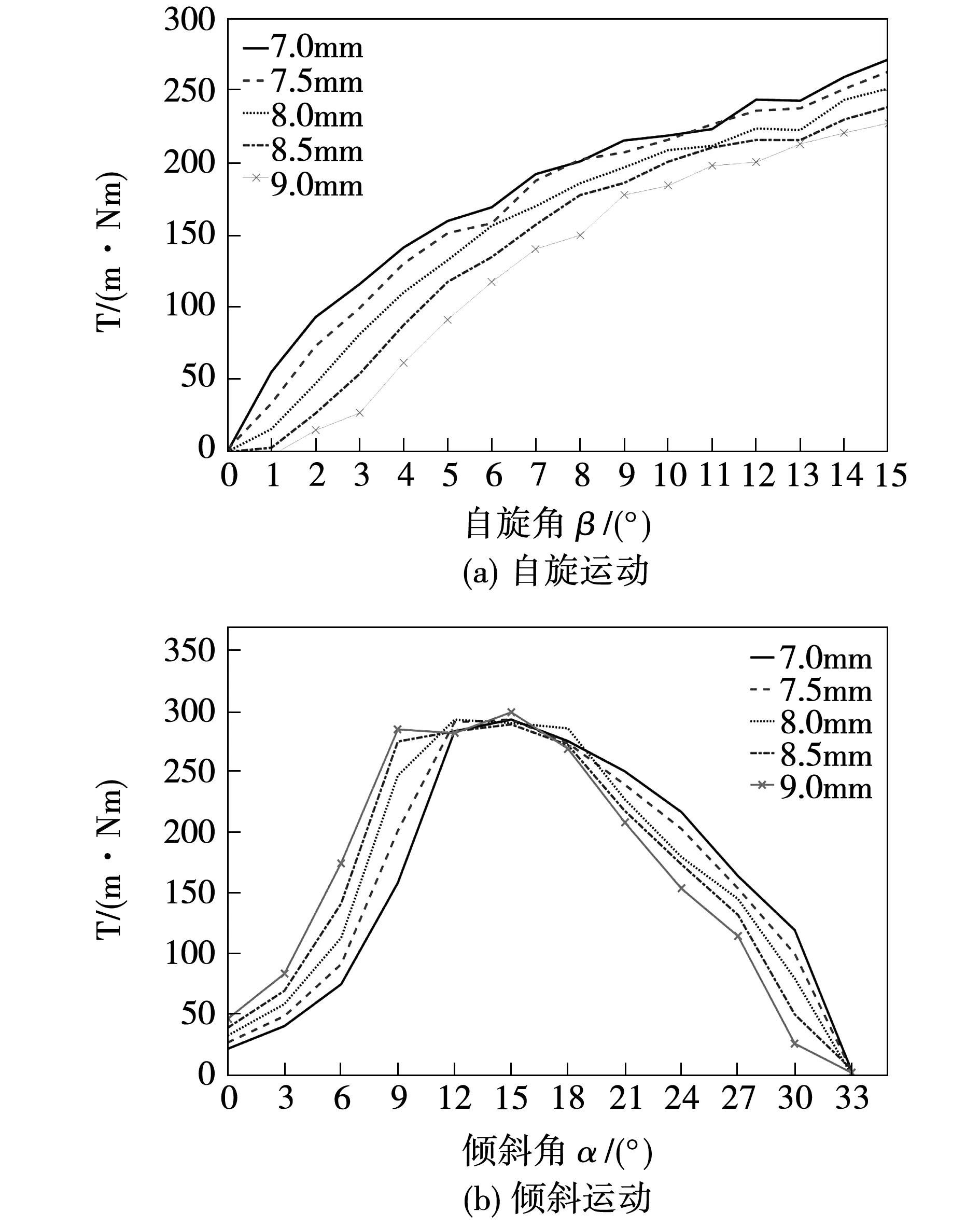
图17 单步进角矩角特性曲线
图18表明定子铁心长度对气隙磁密的影响近似线性,从磁路的角度分析这是由于铁磁材料的空间占用率变高,磁势消耗减小所致。定子铁心长度和转子磁极宽度对磁轭磁密的影响较小,在电机设计的过程中优先级较低。

图18 气隙磁密与磁轭磁密分布图
表3给出了本节电机结构设计使用的主要参数及其仿真范围。

表3 主要参数仿真范围
4 结 论
本文提出了一种新型磁阻型球形电机,在有限元法的基础上对其进行结构设计与磁场分析。相比较永磁球形电机,新型结构的转子简化了电机结构,提高了电机的输出转矩,降低了通电策略的难度。通过分析电机参数对输出转矩、气隙磁密和定子轭部磁密的影响,确定主要参数的优化范围。本文设计电机的方法为相似结构的球形电机设计提供了参考,得出的结论为下一步电机的参数优化提供了依据。
