三相电压型逆变器的反步滑模变结构控制策略
2021-03-02荔凡凡董锋斌
荔凡凡,董锋斌
(陕西理工大学 电气工程学院, 陕西 汉中 723000)
随着半导体行业的发展,电力电子器件的性能不断提升,三相逆变器作为一种常用的电力电子装置,在电力换流、光伏发电、电机控制等方面得以广泛使用。为提高逆变器的性能,满足工业生产的需求,逆变器的控制成为了一个研究的热点[1-2],现有的逆变器控制策略如双闭环、无差拍控制、重复控制等,这些控制策略在带来一定性能提升的同时,也都存在各种不足。双闭环控制和重复控制的调节时间较长,无差拍控制也存在性能相对依赖系统的参数且鲁棒性较差等问题[3]。
逆变器本质是一个非线性系统,采用非线性控制策略的性能相比于采用线性控制策略有更为明显地提升。文献[4]将传统的双闭环、滑模变结构以及反步法控制逆变器的性能做了对比,从中可以看出反步法这一控制策略的性能明显优于双闭环和滑模变结构控制,但是反步法控制对系统参数的依赖性较强,在实际的系统中,电力器件会因为使用时间长而老化以及所处环境带来干扰的影响,从而使系统自身的参数发生变化,在这样的情况下,反步法的控制性能就无法得到保障。滑模变结构控制策略其自身具有对数学模型依赖低、鲁棒性强的特点,但是对于不同的系统,滑模面的建立有一定的难度[5]。
反步滑模控制策略是将反步法和滑模变结构控制结合起来,在保证调节时间相对较短的同时,降低了对系统参数的依赖。文献[6-7]将反步滑模控制策略应用到了单相逆变器这一单输入单输出系统,但是针对多输入多输出系统,却少见有文献报道。因此本文结合反步法和滑模变结构控制的控制优势,以具有严格参数反馈形式的多输入多输出系统为控制对象,进行反步滑模控制律的推导,得出反步滑模控制律的一般数学模型,然后将数学模型应用于三相电压型逆变器系统中,通过仿真实验验证控制策略的合理性。
1 多输入多输出系统反步滑模控制策略设计
反步控制策略需要系统具有严格的参数反馈形式,通过选取合适的虚拟变量以及设计Lyapunov能量函数,反向递推降低系统的阶数,最终设计出使系统全局渐进稳定的控制器[8]。滑模变结构控制策略则是通过建立滑模面,选取合适的滑模趋近律,在使滑模到达条件成立的约束下进行控制器的设计。
反步滑模控制策略设计思路:对于具有严格参数反馈形式的多输入多输出系统,使用反步控制策略设置虚拟控制量和构造Lyapunov能量函数,帮助滑模变结构控制建立滑模面,最终通过代入所选用的滑模趋近律使得所构造的Lyapunov能量函数的导数必须为负以及满足滑模到达条件成立的约束,来进行最终控制律的求取。
由于滑模变结构控制广泛应用于二阶系统[5],结合反步法控制对严格参数反馈形式的要求,文中以具有严格参数反馈形式的2阶多输入多输出系统为对象,进行控制器模型的推导,其一般表达式为
(1)
式中xi(i=1,2)为系统的状态变量,u∈Rm为系统的输入变量,y∈Rm为系统的输出变量,Fi(i=1,2)为光滑函数,Gi(·)(i=1,2)可逆。
对式(1)第一行求导可得
(2)
将式(1)第二行代入式(2)可得
(3)
定义整个系统跟踪误差向量为E1,则
E1=yref-y,
(4)
对E1求导,代入式(1)中y的导数可得
(5)
选取Lyapunov函数
(6)
对式(6)求导可得
(7)
因为y、yref、E1均为列向量,则式(7)可化简为
(8)
定义虚拟控制量
(9)
式中C1为反馈增益对角矩阵,对角线元素属于R+。
将式(9)代入式(8),得到
(10)

选取Lyapunov函数
(11)
对式(11)进行求导得到
(12)
即
(13)
根据式(9)可知,uk由两个误差信号组成,据滑模控制理论可取滑模面为
S=uk。
(14)
根据系统的性能指标,选取合适的滑模控制律,几种典型的趋近律如等速趋近律、指数趋近律、幂次趋近律和一般趋近律,本文以指数趋近律为例进行理论推导:
(15)
式中η、C2为对角矩阵,对角线元素属于R+,sgn(S)为列向量。其中
(16)
其中i=1,2,3,…。
广义滑模到达条件为

(17)

代入式(1)中的系统模型,使其满足约束条件式(10)、(13)、(17)均为负,即可求得控制器模型

(18)
2 三相电压型逆变器的反步滑模控制
三相电压型逆变器模型是一具有严格参数反馈形式的非线性系统,下面讨论将反步滑模控制策略应用到其中去,所使用电路拓扑如图1所示,其负载类型分为阻性、阻感性以及阻容性,本文以阻性负载为例进行建模。
图1中Lf、Cf分别为滤波电感和滤波电容,R0为三相对称负载电阻,Skj为电力电子开关,其中下标k∈{a,b,c},j∈{p,n}。忽略滤波电感、电容内阻及开关导通压降及死区时间。定义线电流
iab=ia-ib,
ibc=ib-ic,
ica=ic-ia,
据文献[9]可以建立逆变器的数学模型为
(19)
式中dab、dbc、dca为线间占空比。式(19)中引入了开关周期平均算子式[10],对各变量求开关周期平均值,将离散模型转换为连续模型。
易知式(19)满足式(1)的表达式,故有
(20)
其中

图1 三相电压型逆变器带阻性负载拓扑
此外,为解决实际系统中存在的电力元器件老化及受到外部干扰使得系统的反馈参数变得不准确的问题,在逆变器模型的建立过程中引入误差项,使模型接近实际,设计的控制器更准确。误差项是由实际系统中器件老化使参数发生变化以及外界干扰引起,与建立系统模型所选取的状态变量无关。
结合式(3)、式(19)可以得到
(21)
(22)
式中e(t)=[e1(t),e2(t),e3(t)]T为三相系统中每一相的误差项,包括电力器件老化带来的参数变化以及外界干扰的影响所产生的误差之和。
结合式(22)及式(20)中各矩阵,代入式(18),可以得到三相逆变器的控制器模型u的表达式:
(23)
此时将式(4)、(6)、(9)、(22)、(23)代入式(13)中,化简可以得到
(24)
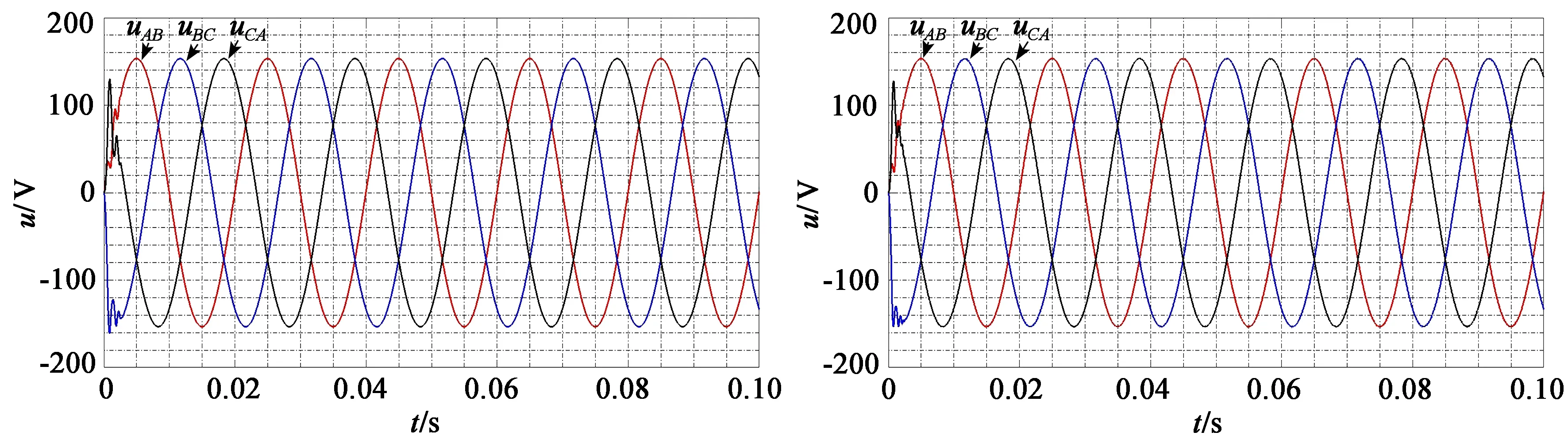
|ei(t)| (25) 综上,可以得到如图2所示的三相电压型逆变器的反步滑模控制结构图。 图2 三相电压型逆变器控制结构图 为验证控制策略的有效性,在此使用MATLAB平台,利用SIMULINK工具包进行仿真,仿真所使用的工况参数如表1所示。整个仿真过程中,负载的变化通过反馈电压、电流来进行实时计算,反馈增益矩阵参数为C1=diag(7×106,7×106,7×106),C2=diag(7000,7000,7000),η=diag(1×109,1×109,1×109)。 表1 仿真工况参数 实际工程环境中,逆变器的应用场景相对复杂。例如光伏发电系统,光照强度会随着时间不断变化,因此给定直流电压也会发生波动,同样在一些电压不稳定的环境中使用逆变器,这样的问题就会更加突出,因此逆变器系统是否能够很好的抵抗直流激励的扰动,是其系统性能的一个重要的指标。 仿真实验中,以给定电压250 V作为基准,电压的变化为250 V→280 V→250 V及250 V→220 V→250 V。仿真结果波形如图3所示,从仿真结果中可以看出,在给定直流激励发生变化之时,系统输出的电压波形基本保持不变,即系统对直流激励扰动有很好的抵抗能力。 图4为三相逆变器在额定工作状态下,其中一相的输出电压波形与参考电压信号的对比,从图中可以看出,系统稳定后,输出电压波形光滑,输出波形的THD为0.12%,相对于文献[9]中反步控制输出波形的THD为0.35%,谐波含量更低,同时输出波形幅值和频率基本服从给定无静差。 图4 输出电压跟踪参考信号波形 在负载发生变化的时候,系统调节时间是衡量系统动态响应的标准之一。调节时间越短,超调量越小,则系统的动态响应越好。给定额定状态系统负载为35 Ω,在负载扰动的仿真实验中,系统先是由半载切换到满载,稳定之后再由满载切换到半载,仿真波形如图5所示。 从图5波形中可以看出,在负载发生变化之时,系统在1 ms左右就可以恢复到稳定状态,相比于文献[11]中的传统双闭环控制策略调节时间为2.5 ms,具有明显的优势,说明反步滑模控制策略对负载扰动的抵抗能力优于传统的双闭环控制策略。 (a) 负载突变电压波形 (b) 负载突变电流波形 图5 负载突变响应波形 电力器件老化以及所处环境的影响会导致系统参数发生变化,为验证在系统自身参数发生变化时,控制器能否保持良好的控制性能,在满载状态下,将三相滤波器电感和电容有效值均下调10%与在原参数下的工作状态作对比,仿真波形如图6所示。可以看出,在参数均下降10%时,系统输出电压波形幅值基本不变,同时由于参数的增大使得滤波器的截止频率变大,但输出波形的THD仅由0.12%增长为0.35%,远小于5%的国家标准,体现了反步滑模控制的有效性以及系统的强鲁棒性。 (a) 参数不变电压波形 (b) 参数下降10%电压波形图6 系统参数扰动电压波形 本文讨论了反步滑模控制器的一般设计步骤,通过反步法降低系统的阶数,设置虚拟控制量,并构建合适的Lyapunov能量函数,帮助滑模变结构控制进行滑模面的建立,在Lyapunov能量函数的导数为负以及滑模到达条件成立的约束下,进行控制器的设计。并将反步滑模控制策略应用到三相电压型逆变器系统中去,得到了其控制器模型的一般性表达式,最后通过SIMULINK仿真验证控制策略的有效性以及算法的合理性。

3 仿真验证
3.1 仿真参数

3.2 直流电压扰动仿真波形
3.3 信号跟踪与负载扰动仿真波形


3.4 系统参数扰动仿真波形
4 结论
