水利工程自动化控制系统故障排除方法探究
2021-03-02茜扬
茜 扬
(广东省水利电力勘测设计研究院,广州 510635)
0 引 言
基于智能化技术的创新,对工程项目提出了自动化控制管理,建立了工程项目自动化控制系统[1]。研究发现,自动化控制系统对工程的管理控制具有显著的作用。该系统由智能芯片与监测装置构成,实时对系统的最高供应需求进行匹配。同时,该系统采用的是复式建设结构,根据ARM在系统中的嵌入,实现在不同情况下对工程实施的监测与维护。并利用C15单机片集成计算机硬盘,由远程设备及后台管理员进行操控,满足对获取信息的数字与模拟转换[2]。因此,自动化控制系统是实施水利工程的重要保障。但由于智能化技术的应用尚不成熟,系统运行仍存在一些漏洞,这些空白与漏洞均是影响系统持续运行的重要影响因素。倘若忽略系统中的漏洞,极易造成系统运行故障,严重情况下会传递错误的水利数据。为此,本文将以水利工程为例,开展自动化控制系统故障排出方法的设计,解决水利工程控制及管理中存在的问题,提高系统的稳定运行能力,缓解系统在长期高负荷运行状态下的压力,为水利工程项目的实施提供技术支持。
1 水利工程自动化控制系统故障排除方法
1.1 提取系统初始化故障信号
为了解决水利工程自动化控制系统在运行中存在的故障,首先应进行排除指令频谱的分解,根据分解结果进行故障特征的检测,并在此基础上执行故障信号特征的识别[3]。考虑到供应系统运行的电源采用分布式直流电,因此可认为在此种组件结构下系统发生故障的信号均为漏电信号。基于此,提出自适应算法,设计故障识别传递函数。在传递过程中,使用传感器与执行器进行系统故障数据的传输[4]。传递过程可用如下公式表示:
(1)
式中:Hs为故障信号传递过程;η为故障信号;φ为信号频率;m为故障种类;J为信息传输路径;B为网络节点通信;δ为A/D转换过程;f为故障信号特征。

xasinγ=xacosα
(2)
式中:x为提取的故障信号;α为提取次数;γ为故障信号的频率;N为识别信号种类;n为故障信号相位。
根据上述计算公式,将提取的初始化数据集合采用包络分析方法进行数据关联性的进一步挖掘,可得到故障信号指令的频谱特征[6]。在此过程中,按照能量尺度对故障信号进行分解,将分解后的数据值整理成集合,作为系统在初始化故障信号。
1.2 识别系统发生故障类型
使用上文提取的系统初始化故障信号,采用深度学习的方式,将系统中隐藏感知层的数据结构采用抽象的方式表达。同时根据系统常发故障集及发生故障的类别,对故障类型进行划分。划分的过程可用如下公式表示:
(3)
式中:s为故障信号种类;v为自动巡检异常信号。
利用上述计算公式将不同故障类型近似模拟为一个调幅信号,并根据信号在传递中的消耗量,预测故障类型识别执行指令的尺度及其参量的变化趋势[6]。在此基础上,为了进一步对故障发生点进行精准定位,采用对故障信号进行稀疏分离处理的方式,选择数据集中的特征量,按照其频谱的偏移程度,对故障信号进行局部处理,以此得到不同类型故障信号的输出样本。可将其记为如下公式:
X1(k)=FFT[x1(k),x1(k+1),…,x1(k+N-1)]T
(4)
式中:X为不同类型故障信号的输出样本集合;k为稀疏处理中的某一信号的变换系数。
以此样本集合作为故障排除的依据,进而掌握系统发生故障中不同信号的类型。
1.3 执行故障排除工作
根据故障信号的类型,利用系统训练样本建立对应的故障矩阵。例如,当给定自动化控制系统一个故障信号时,这一信号的所属类别是未知的[7]。因此,根据上述相关公式,在掌握信号的类型及故障发生点后,可根据对信号检测结果的差异性进行特征量的辨识与故障排除。步骤如下:
第一步:压缩故障信号,使用单机片集成压缩信号,以此提高检测方法的远程协调适应能力。并按照系统的总线设计方式,输入故障排除指令。
第二步:在得到故障信号的随机排列顺序后,提取信号频谱特征,挖掘故障发生的时延。计算故障指令的峰值,计算过程如下:
(5)
式中:p为故障信号辨识度;e为频谱特征。
第三步:在完成上述相关工作后,根据故障的辨识,执行排除指令。并按照时延及时调整指令执行顺序与时间,以完成对水利工程自动化控制系统故障的排除。
2 实 验
2.1 实验准备
本节将结合水利工程自动化控制系统的运行现状,提出一个测试,检验本文提出方法的应用性能。使用C#/C++语言编译程序,进行系统故障排除指令的编辑。为了提高实验结果的准确性与真实性,将水利工程自动化控制系统对于故障信号的传输频率控制在10.0~15.0 kHz范围内,当获取到故障信息后,模拟信号将自动转换为数字信号。在此过程中,调整信号转换的增益值为35 dB,并设定故障信号的样本集合的规模为5000.0,至此完成此次实验的系统故障及相关参数设定。根据上述采集的系统故障数据样本,按照信号变化的频率幅度及采集的时间,绘制成曲线图,见图1。
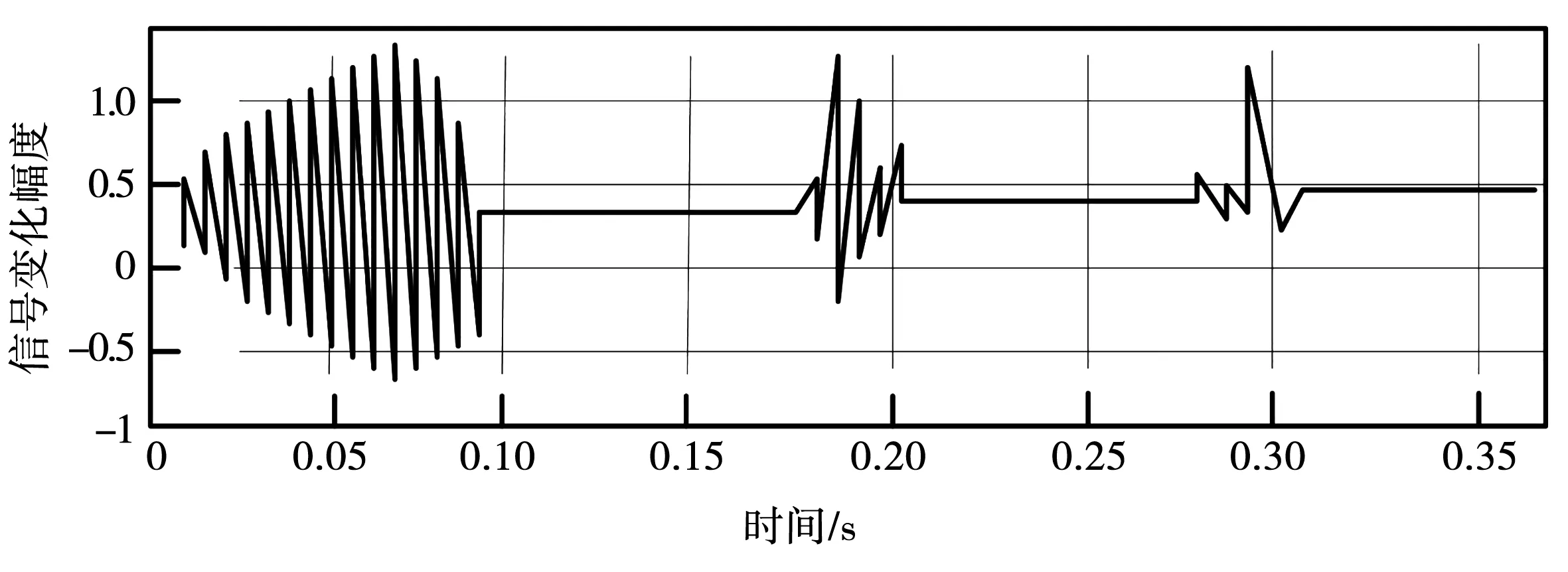
图1 采样的系统故障数据样本
根据图1中表述的信息,可清楚地看出本次研究的水利工程自动化控制系统存在多种故障,且故障的表现形式均不相同。为此,将本文提出的故障排除方法定义为实验组,传统故障排除方法定义为参照组,分别使用两种方法对系统监测到的故障信号进行排除。在此过程中,控制影响实验结果的相关变量,以此完成此次仿真实验的实验准备。
2.2 实验结果分析
根据上述进行的实验准备与实验组别划分,执行此次仿真实验,记录实验过程中发生的相关数据,并整理数据,将其绘制成图2、图3所示的实验结果。

图2 参照组故障排除方法结果

图3 实验组故障排除方法结果
图2、图3为实验组与对参照组故障排除方法的实验结果。从图2和图3中可明显看出,两种方法均可实现对系统故障信号的排除,但在对比中发现本文方法对故障的排除的效果较为显著。如发生在0.0~0.10 s之间的系统故障,传统方法可对故障进行边缘排除,而本文方法对故障进行深入排除;对于发生在0.15~0.35 s之间的故障,本文方法可进行故障的完全排除。因此,根据实验结果得出此次仿真实验的结论:相比传统的故障排除方法,本文提出的水利工程自动化控制系统故障排除方法在实际应用中可实现对系统发生的故障信号进行有效排除,效果相对显著,更加适用于水利工程等大型项目。
3 结 语
水利工程是受到社会重点关注的大型工程项目,无论是在实现输送水资源,或是在提高水库蓄水量方面均发挥了十分重要的作用。随着自动化技术的快速发展,对于水利工程的控制已经由人工控制转换为自动化控制。因此,本文开展了水利工程自动化控制系统估值故障排除方法的深入研究,为了检验提出方法的有效性,采用设计仿真实验的方式验证了提出方法在实际应用中具有显著的效果。对于系统发生的故障,本文提出的故障排除方法对故障的排除更为有效。因此,在后期的水利工程建设及发展规划中,可适当加大本文提出方法的应用,提高系统的综合可持续运行能力,降低系统发生故障的次数,确保水利工程在各个方面的正常运行。
