车联网中基于交通流量感知的数据路由
2021-03-01杨梓晗
孙 列,杨梓晗
(1.西安航空学院 飞行器学院,西安 710077;2.湖北工业大学 工业设计学院,武汉 430068)
0 引言
作为现代社会最重要的基础设施,交通系统的效率直接影响居民生活质量。然而,随着交通流量的增加以及道路车辆数的激增,交通事故频繁发生[1-2]。因此,如何有效地提高道路安全,是交通系统亟待解决的问题。
车载网络(vehicular networks, VNs)已成为智能交通系统(intelligent transportation system, ITS)的重要组成部分,能有效地缓解交通事故的发生[3]。VNs利用车辆间(vehicle-to-vehicle, V2V)的通信和车辆与基础设施(vehicle-to-infrastructure, V2I)的通信,提高道路行驶安全。
然而,由于车辆的高速移动,以及移动方向的变化,车载网络存在不稳定、低可靠的特性。这使得安全相关的消息可能不能及时传递至道路上所有车辆。因此,如何有效地将消息传输到车辆,成为VNs的研究热点[4]。
由于拓扑的快速变化,传统的基于移动自组织网络(mobile ad hoc networks, MANETs)的路由,如链路状态协议(optimized link state routing, OLSR)[5]、按需距离矢量路由(ad hoc on demand distance vector, AODV)[6]等并不能获取好的路由性能[7]。研究人员把目光转向地理位置路由。依据源节点和目的节点的位置信息决策路由,如文献[8]提出的基于位置信息的车联网路由,利用全球定位系统(global positioning system, GPS)接收机提供的行车参数信息,并利用这些信息恢复路由;文献[9]提出基于地理位置改进的车联网路由,根据车辆移动方向和速度,预测车辆运动轨迹,并据此轨迹选择下一跳转发路由,进而保证路由的可靠性;文献[10]提出1个混合路由协议,将贪婪边界状态路由(greedy perimeter stateless routing, GPSR)和层次位置服务(hierarchical location service, HLS)策略相结合,通过GPSR策略传输数据包。当目标节点位置不确定时,就通过HLS策略获取目标节点的位置。
此外,VNs是依据道路上的车辆转发数据的,所以如何选择路段传输数据是数据转发的关键。为此,研究人员提出基于流量感知的交叉口路由和基于道路的地理位置路由。例如,文献[11]针对3维城市道路,提出了改进的定向路由。该路由采用动态的传输范围,并采用虚拟邻居节点策略选择可靠路由。然而,该路由并没有给出如何调整车辆的传输范围,也未能分析传输范围对路由性能的影响。为此,本文提出交通流量感知的数据路由(traffic volume-aware data routing, TVDR)。TVDR路由先将道路划分为不同的矩形格,并推导基于路段连通的概率,然后选择连通率最高的路径传输数据。
1 约束条件
TVDR路由是依据路段的连通情况传输数据的,并通过预测流量信息估计每个路段的路径连通率。引入布尔变量Ci来表示路段i是否为数据源参数,如果Ci大于预定的阈值,则Ci为1;否则Ci为零。
由于高频信号的穿透性差,假定数据包只沿着道路传输,另假定道路是双向的,且每个方向至少有2个车道。只要在源节点通信范围cR内的车辆,都可作为转发节点,如图1所示。同一方向车辆可以转发数据包,反方向车辆也可转发数据包。数据转发示例如图2所示。
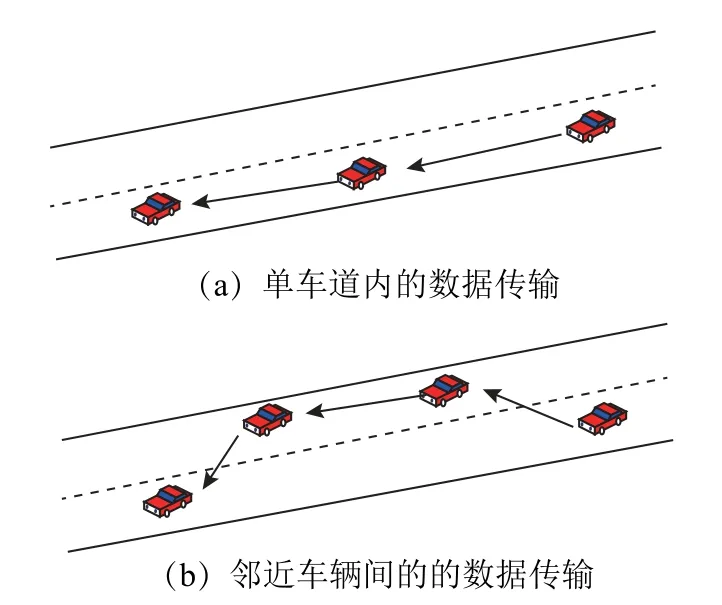
图1 数据转发策略
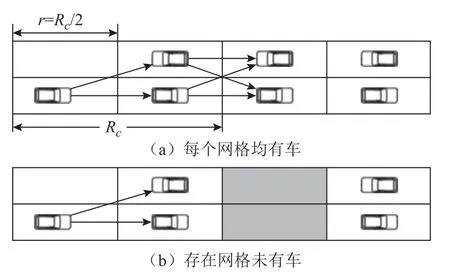
图2 数据转发示例
将路段照射于矩形格,每个格的长度为r=Rc/2,如图2(a)所示。假定在矩形格内每辆车能够与邻近矩形格内的其他车辆直接通信。在每个方向上,1辆车至少有2条潜在的转发链路。换而言之,如果在2个矩形格内没有车辆,则表明不存在转发数据的链路,如图2(b)所示。
2 TVDR路由
TVDR路由主要路段连通率估计和贪婪数据转发2个阶段构成。
2.1 路段连通率估计
令V(i)d表示在时间段[t,t+Δt]内通过路段i、t方向d上的总的车辆数,其也称为总流量数。Δt= 15min 。
可依式(1)计算在时间段Δt内的平均车辆数单位为每分秒车辆数,即

式中:d表示方向的布尔变量,其定义如图3所示。
接下来,推导以下两种情况下的路段连通情况:1)理想情况。在理想情况下,假定车辆以平均速度均匀行驶在道路上,则在路段i上平均车辆数为

因此,在每个矩形格内的平均车辆数为
式中cR为车辆的通信半径。
当在矩形格有1辆车,车辆就能够转发数据。换而言之,当路段i上的方向平均车辆数大于1,则该路段是连通的,因此就能够通过该路段转发数据。
2)非理想情况。假定在该路段上的车辆仍以均速行驶,但车辆并不服从均匀分布,而是服从泊松分布。令为平均达到率,则有

因此,在时间段[t,t+Δt]内,路段i方向d上的平均车辆密度为

由于到达该路段上的车辆服从泊松分布,在每个矩形格内的车辆数服从式(6)所示的概率质量函数(probability mass function, PMF),即

2.2 数据转发策略
为了抑制因数据转发所引起的广播风暴问题,只在路径搜索区域内传输路径发现消息。由源车辆和目的车辆的相对移动构建路径搜索区,如图4所示。

图4 路径搜索区域示例
具体而言,将源车辆的移动方向作为x轴,由源车辆和目的车辆的移动轨迹构建路径搜索区域。不失一般性,路径搜索区域越大,可选择的路径就越多。对路径搜索区域进行扩展,图4中的斜线阴影部分就是扩展后的区域。
最后,可归纳执行TVDR路由的步骤如下:
步骤1:源节点沿着路段,并在2个方向上传输路径请求消息(path request, PREQ)。PREQ以HELLO消息格式为基础,并进行修改,如图5所示。

图5 PREQ消息格式
PREQ消息包括源车辆的速度、目的节点身份标识号(identity, ID)以及路径搜索区、转发路段序列号、路段连通率。TVDR路由采用贪婪方式转发PREQ,直到PREQ传输至位于每个路段交叉口的路边单位(road side unit, RSU)。
步骤2:当RSU接收到PREQ,就进入路径发现阶段。RSU从PREQ消息中提取目的节点ID,判断是否在自己覆盖的范围内。如果目的节点在自己的覆盖范围内,RSU就向该目的节点传输PREQ消息;否则,RSU就更新PREQ中路段序列号,并向下1个RSU转发。
步骤3:目的节点在预定的等待时间Twaiting内,可能接收到多条PREQ消息。换而言之,可能存在多条从源节点至目的节点路径。假定存在m条路径,目的节点就从中选择具有最高连通率的路径传输数据。然后,沿着该路径向源节点回复确认消息ACK。
3 性能分析
3.1 仿真环境
利用矩阵实验室(matrix laboratory, MATLAB)软件建立仿真平台,分析TVDR路由的性能。引用曼哈顿(Manhattan)移动模型[12]产生车辆的移动轨迹数据,如图6所示。在1 000 m×1 000 m 城市区域内部署100~1 000辆车。每个路段的长度为200 m,车辆相关的仿真参数如表1所示。Manhattan为网格场景,场景区域面积为1 km2,每次实验独立重复30次,取平均值作为最终的实验数据。

图6 Manhattan移动模型示例
表1 仿真参数
为了更好地分析TVDR路由的性能,选择文献[6]的AODV路由作为参照,并对比它们的控制开销和吞吐量性能。
3.2 吞吐量
首先分析理想情况和非理想情况下的吞吐量,分别如图7(a)、图7(b)所示。从图7可知,车辆数的增加,使平均吞吐量呈上升趋势,但当车辆增加到一定数量后,吞吐量上升缓慢。原因在于:最初车辆的增加,可大幅地提升数据传输量;但当车辆增加到一定量后,车辆数的增加会提高网络的拥塞率,从而抑制了数据传输成功率。

图7 吞吐量
从图7可知,相比于AODV路由,提出的TVDR路由的吞吐量得到有效提高。这主要是因为TVDR路由利用路段连通率传输数据,提高了数据传输成功率。
3.3 系统开销
最后,分析理想情况和非理想情况下的系统开销。系统开销是指每传输1条消息所产生的控制消息数,分别如图8(a)、图8(b)所示。
图8 系统开销
从图8可知,在理想和非理想2种情况下,相比于AODV,TVDR路由能有效地控制系统开销。例如,在理想情况下,当车辆数为1 000时,TVDR路由的开销为13,而AODV路由的开销达到约170。原因在于AODV路由采用泛洪策略传输控制消息。对比图8(a)、图8(b)不难发现,非理想情况下的TVDR路由的开销大于理想情况。
4 结束语
本文对车载网络的数据传输问题进行分析,提出交通流量感知的数据路由TVDR。TVDR路由从路段角度选择路径:先依据车辆的流量信息,推导路段连通率,再依据连通率选择数据传输的路径。仿真结果表明,相比于AODV路由,提出的TVDR路由可有效提高系统吞吐量,并能有效减少控制系统开销。