机器视觉在垃圾分拣机器人设计中的应用
2021-02-28德州职业技术学院刘玉丛
德州职业技术学院 刘玉丛
文章提出一种基于机器视觉进行垃圾分类的机器人设计,在具体设计过程中首先分析设计的总体方案、设备功能要求以及系统布局,再从目标识别单元和分拣控制单元两方面完成具体设计,以期能够提高垃圾分拣机器人在垃圾分类过程中的正确率和与有效性。
现阶段,城市垃圾资源回收处理已成为社会关注的重点内容,其不仅符合我国可持续发展的战略规划要求,也是解决当前城市发展与环境破坏矛盾,实现人与自然和谐共存的重要途径。垃圾分拣作为城市垃圾资源回收的重要步骤,其工作效率将会直接影响到城市垃圾资源回收效率及效果。因此,为能够进一步提高垃圾分拣工作效率,实现垃圾分拣自动化已成为必然的发展趋势。据此,对基于机器视觉的垃圾分拣机器人设计进行研究分析,有一定现实意义。
1 基于机器视觉的垃圾分拣机器人总体方案设计
1.1 总体方案设计
基于机器视觉进行垃圾分拣的机器人需要对分拣过程中无法通过磁吸、震筛等传统方式进行处理的高回收价值目标进行识别分拣,基于此要求,在本垃圾分拣机器人设计过程中将会采用机器视觉和工业机械臂相结合的自动化垃圾分拣方案。
基于机器视觉的垃圾分拣机器人设计主要分为目标识别单元和分拣控制单元两部分。其中,目标识别单元主要由图像采集摄像机、工业计算机等设备共同组成;分拣控制单元则由综合控制设备、末端执行设备、工业机器人以及工业机器人控制设备共同组成。机器人设计方案如图1所示。
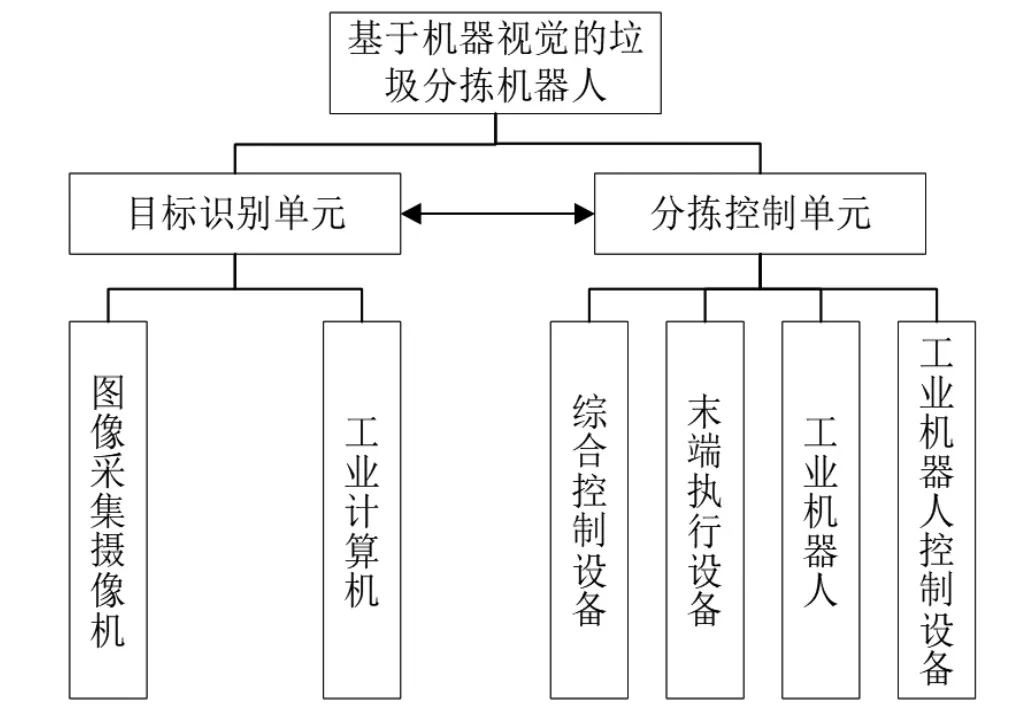
图1 总体方案设计
1.2 设备功能分析
(1)图像采集摄像机:设置在垃圾传送带上方,主要用于实时获取传送带上垃圾的图像信息,并将所采集到的图像信息传递给工业计算机进行识别处理。
(2)工业计算机:基于图像采集摄像机所传递的图像信息,根据预设的各类垃圾参数特点,对图像信息进行识别处理,获取到垃圾目标的实际空间坐标和角度信息,然后将相关数据传递给分拣控制单元,同时输出相应的控制指令。
(3)综合控制设备:其是分拣控制单元的核心,可实现多台工业机器人的同步操控工作。通过控制总线接收工业计算机所传递的空间坐标、角度信息以及控制指令,然后将相关信息及指令进行转换,发送给工业机器人控制设备。
(4)工业机器人控制设备:根据综合控制设备所传递的控制指令,对工业机器人进行具体控制。
(5)工业机器人:接收工业机器人控制设备的控制指令,实施具体动作轨迹规划,以此来驱动末端执行设备。
(6)末端执行设备:根据控制指令对垃圾目标进行正确分拣。
1.3 系统布局
根据上述总体设计及设备功能分析,合理提出基于机器视觉的垃圾分拣机器人设计布局方案,如图2所示。
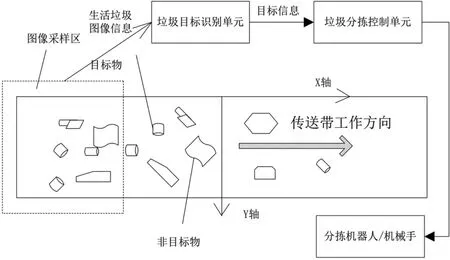
图2 设计布局方案
2 目标识别单元设计
2.1 软件设计
为保障目标识别单元的应用效果,在具体应用中需要将机器学习与人机交互纠错机制相结合,提高垃圾分拣机器人对垃圾分类识别的正确率。基于此目的,目标识别单元软件部分包括深度学习网络、人机交互纠错接口、综合处理单元三部分。其中,深度学习网络和综合处理单元将会设置在工业计算机上,保障工业计算机能够快速识别、分析传送带上的垃圾;人机交互纠错接口软件虽然也设置在工业计算机中,但其可以采用触摸屏和计算机鼠标控制两种操控模式,方便操作人员对垃圾目标进行快速处理,为提升识别目标单元正确率提供支持。
2.2 形态识别模块
形态识别模块设计中引入了形态学知识,以此为基础对图像采集摄像机所拍摄的各类图像信息进行形态识别、提取、剔除、聚类处理,进而获取到图像信息中的二维坐标、角度信息和时间信息等,然后对目标垃圾进行跟踪显示;判断各图像中目标垃圾是否为统一目标,若是非统一目标,则会再次对图像中目标垃圾的二维坐标、角度信息和时间信息进行计算分析,并将分析结果传递给人工辅助处理模块;反之,若是统一目标,则不传递信息。
2.3 识别算法优化
在现有的VGG16网络结构的基础上,将VGG16网络卷积层上的第三、第四以及第五层进行有机融合,使得优化后的网络架构能适用于垃圾分拣中各类有价值垃圾的识别检测,同时强化物品角度预测能力,降低物品角度预测误差几率。
具体来说,识别算法优化主要包含以下三方面内容:
(1)将现有VGG16网络结构中的卷积层上第三、第四以及第五层进行有机融合。
(2)将现有的分类回归损失和角度预测解相耦合,以此来保障两者独立训练和预测效果。
(3)通过全卷积网络实施算法训练,保障训练速度的同时,避免出现网络参数拟合。
2.4 人工辅助模块
(1)人工纠错模块:人工纠错模块会呈现图像采集摄像机所采集的图像信息,工作人员根据图像变化来判断图像识别的有效性,并将系统识别过程中有明显错误的目标去除,有效信息会自动传递给综合处理单元进行分析处理。
(2)人工辅助处理模块:同人工纠错模块相类似,人工辅助处理模块也需要对图像信息进行分析判断,然后将图像中系统识别到的缺漏目标进行标记。在人工标记后,系统会自动分析标记目标的二维坐标、角度信息以及时间信息,并将相关信息传递给综合处理单元处理。
2.5 综合处理单元
综合处理单元在接收到人工纠错接口和人工辅助处理模块所传递的错误目标或者缺漏目标信息后,会自动分析处理目标在图像中的二维坐标信息、角度信息以及时间信息,去除错误目标,添加缺漏目标,为后续分拣控制单元的有效控制提供参考。在实际应用过程中,由于目标垃圾处于时刻运动状态,所以,为解决同一目标在连续运动状态下的信息提取问题,还需要在设计中引入基于机器视觉的目标信息提取方法,实时记录和综合分析目标垃圾在每种图像状态下的坐标参数变动情况,结合角度、时间等参数来实现图像对比,实现同一目标的动态化信息提取。
3 分拣控制单元设计
3.1 坐标系设计
(1)图像坐标系:将图像采集摄像机所采集图像的左下角坐标作为原点,然后根据图像的像素情况划分图像坐标点,例如:图像大小为1600×1200dpi,那么图像坐标系原点相对应的右上角点的坐标即为(1600,1200)。
(2)传送带坐标系:同图像坐标系相类似,传送带坐标系也需要将左下角的某一固定边缘点设定为坐标系原点,此坐标系的X轴则为传送带的行进方向,Y轴则是传送带行进方向的垂直方向。
(3)多机械手坐标:机械手在传送带坐标系上的平面坐标点将会以机械手与传送带交点为基准,具体空间坐标系将会采用传递带坐标系。
(4)人机交互界面坐标系:以任意交互界面最左下角像素点作为原点,根据界面构建坐标系。
3.2 多机械手控制
综合控制设备会将接收到的目标识别单元所传递的目标信息和相关指令存储在缓存区,然后根据目标信息预测目标在传送带上的后续坐标信息,进而控制距离目标最近的机械手对目标进行抓取。在此过程中,综合控制设备会时刻判断缓冲区内是否存在新目标的二维坐标和角度信息,若存在,则会根据新目标的二维坐标和角度信息发出新的控制指令。
结束语:综上,为满足当前环境保护及可持续发展相关需要,本文提出一种基于机器视觉的垃圾分拣机器人设计方案,此设计方案主要分为目标识别单元和分拣控制单元两部分内容,其中目标识别单元主要负责对机器视觉图像进行识别、分析及处理,为分拣控制单元提供相应的数据信息支持;分拣控制单元则可以根据目标识别单元所提供的信息参数,控制垃圾分拣机器人完成垃圾分拣操作。结合实际情况来看,此设计可以实现对在垃圾分拣过程中,无法通过磁吸、震筛等传统方式进行分拣处理的高回收价值目标进行识别分拣。本方案虽然未涉及到具体算法、设备型号以及控制代码相关内容,但该方案仍可以作为后续垃圾分拣机器人设计的参考。