小型米散射激光雷达测量雾中能见度的研究
2021-02-28李昌熹
石 荣,李昌熹,2
(1.重庆理工大学 两江国际学院,重庆 400054;2.韩国科学技术院 电子工程学院,韩国 大田 34141)
能见度是反映气体透明度的指标,在雾中驾驶时,能见度随着雾的密度增加呈指数级下降,从而给司机的驾驶带来诸多不便和不安全因素,甚至导致重、特大交通事故的发生,因此实时、准确地探测雾的能见度显得尤为重要。米散射激光雷达因为其激光雷达具备高测量精度、精细的时间和空间分辨率以及长距离探测,被广泛地用于能见度的探测[1]。
1963年,Smullim和Fiocco[2]使用波长为694 nm,脉宽50 ns,能量为500 mJ的脉冲激光器为激光源,首次实现了对14~25 km高度范围内气溶胶回波信号的探测。1992年,Whiteman[3]使用0 3 nm窄带滤波片作为分光元件设计了拉曼-米散射激光雷达,能够同时探测大气水汽和气溶胶的分布。1992年,Ansman[4]利用单脉冲能量为270 mJ的激光器,400 mm口径的望远镜搭建了激光雷达并给出了2~10 km内的消光系数分布图。2001年,Hair[5]利用碘蒸气滤光器高光谱分辨率雷达实现了大气状态和气溶胶分布的测量,给出了15 km高度内的后向散射比和8 km高度内的消光系数。2005年,谢晨波[6]自主设计搭建了国内首台车载式拉曼-米(Raman Mie)散射激光雷达的结构和技术参数,并利用斜率法从激光雷达的采集数据中反演出大气水平能见度。2009年,岳斌[7]提出了利用905 nm半导体激光雷达探测大气斜程及水平能见度的方法,解决了针对雾天或多云天气等不均匀大气中斜程能见度难以测量的问题,其能见度探测范围为50~2 000 m。2014年,吕立慧[8]使用收发一体Y型光纤束为微脉冲激光雷达(MPL)系统的后继光学单元,利用分段斜率法反演气溶胶水平消光系数,获得了大气能见度及变化特征。2017年,孙国栋[9]研制了一套可以全天候测量的成像激光雷达并克服了传统的后向散射激光雷达系统结构复杂和需要几何因子矫正的问题。2019年,乔启发等[10]设计了以电荷耦合器件(CCD)为探测器件的大气水平能见度测量系统,并对该系统采用局部加权回归算法进行了研究。其测量结果与商用NQ-1能见度仪进行了同步对比测量,系统测量的误差值从3 km减小到0 8 km左右。传统的激光雷达主要用于大气气溶胶消光系数的探测,往往需要超大功率的激光器和大口径接收望远镜且系统的集成度很低,从而导致激光雷达系统通常成本昂贵、操作复杂,体积庞大而难以移动[11-15]。
本文中研制了用于探测雾消光系数及其能见度的激光雷达系统,通过激光器模块和雪崩探测器模块的使用极大地降低系统的质量和操作难度,利用准直镜和平凸透镜组合分别代替发射望远镜和大口径接收望远镜实现了激光雷达系统发射系统和接收系统的小型化和紧凑化,1 550 nm波长激光的选择以及低功率确保了对人眼的安全。通过对雾的探测结果证明了小型米散射激光雷达系统的可行性。
1 激光雷达探测能见度计算原理与数据处理方法
假定激光束传输路径上雾滴粒子均匀分布,且以阳光或均匀的天空照明下为前提,根据Koschmieder定律[16]:

式中:ε为视觉感应阈值,即人眼将目标物从背景中区别出来的最小亮度对比;V为能见度;σ为雾滴粒子的消光系数。根据国际航空组织规定,气象能见度视觉反应阈值取ε=0.02,其相当于人眼能看到黑色目标物最远的距离,从而得到水平能见度方程[10]:

不难得出测量能见度的核心问题是如何准确探测雾的消光系数。目前计算消光系数主要的方法有Collis斜率法[17]、Klett反演法[18]和Ferland反演法[19]。在短距离范围内雾可视为均匀分布,从而可用Collis斜率法求解消光系数,其计算过程如下:
对于米散射激光雷达接收到距离R处的大气散射回波信号能量为[8]:

式中:P(R)为激光雷达接收望远镜接收到的距R处的雾的回波功率;P0是发射的激光脉冲功率(W);C为系统常数(W·m3·sr);β为距离R处的雾滴粒子后向散射系数(m-1·sr-1);σ为雾滴粒子的消光系数(m-1)。其中距离

式中:t为激光飞行时间(ns);c为光速(3×108m/s),将式(4)代入式(3)两边取对数并对时间t求导可得:

式中:S(t)为时间平方矫正函数,在短时间内β和σ可视为常数,从而可得雾消光系数:

2 小型米散射激光雷达系统
本文中设计的小型米散射激光雷达系统结构如图1所示,该系统为平行双轴模式,其主要由激光发射系统,激光接收系统和信号采集系统3个部分组成。激光发射系统由二极管固体激光器模块和准直镜构成,激光器波长为1 550 nm,脉宽1~100 ns可调,重频1~1 000 kHz可调,最高峰值功率为40 W,激光经过准直镜后其光斑大小为3 6 mm,发散角为0.56 mrad;激光接收系统为透镜组和窄带滤波片组合而成。激光通过准直镜准直后水平射入雾中,在传输过程中与大气中的雾滴粒子发生米散射和吸收作用机制,产生后向散射回波信号;回波信号被主接收镜接收,而后回波信号经过物镜转换组聚焦至空间雪崩光电探测器的光敏面,将光信号转换为电信号,窄带滤波片将滤除出工作波长以外的杂散光,从而提高系统的信噪比,电信号被示波器采集并保存,而后通过一系列数据处理方法完成雾消光系数及其能见度的测量。
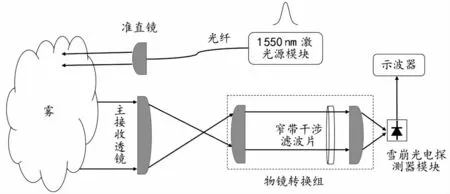
图1 小型米散射雷达系统示意图
小型米散射激光雷达系统的主要参数如表1所示。
本文激光雷达系统通过使用直径50.8 m的主接收镜与直径25.4 mm物镜转换组合构成了激光接收系统,代替了传统的大口径望远镜,使得接收系统结构简洁,同时降低了因光轴调节不善带来的误差。与11 mm的准直镜组成的接收发系统实现了激光雷达系统的小型化,紧凑化。1 550 nm波长激光的选择实现了人眼的安全保护,相对于传统的大气测量激光雷达系统几百瓦的高发射功率,本系统的峰值功率为40 W,从而有效地降低了系统的成本。
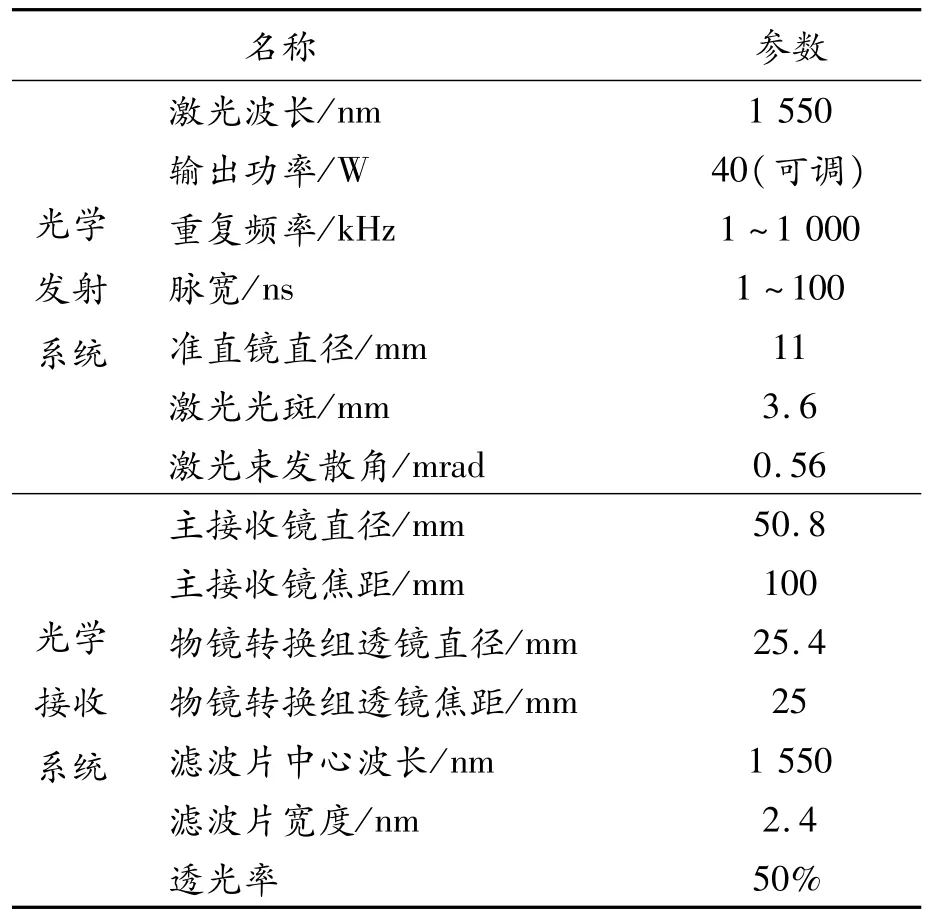
表1 小型米散射激光雷达系统主要参数
3 几何重叠因子计算
在双轴模式下,激光发射单元和信号接收单元的光轴如图2所示。激光束的发射视场与接收视场之间由完全分离逐渐过渡到完全重合,这样的光学系统结构使得接收望远镜在近场范围内只能接收部分回波信号,如果用此部分的回波信号进行能见度的反演则将导致反演结果产生较大误差,因此在对回波信号进行反演处理之前,必须进行系统几何重叠因子Y(R)进行计算,从而得到有效的回波信号。
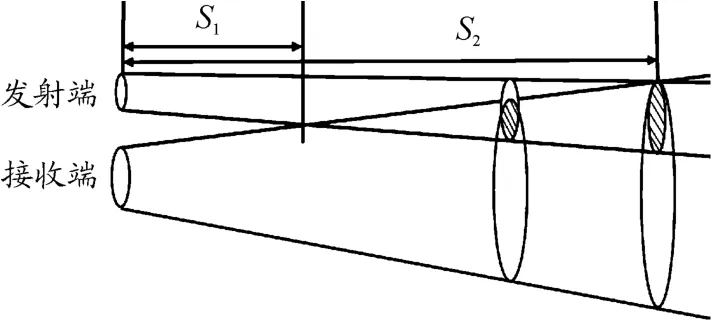
图2 发射端与接收端光路示意图
由图2可见:在分离区接收端接收不到任何的回波信号,此时Y(R);在过渡区部分回波信号逐渐进入接收端的视场范围内,此时0<Y(R)<1并且Y(R)逐渐增大;而在重合区回波信号完全进入接收端的视场中,从而Y(R)=1。因此,需要计算激光雷达系统的发射区和接收区起始汇合点S1和完全重合点即S2。起始汇合点S1和完全重合点S2可通过式(6)和式(7)计算[14]:
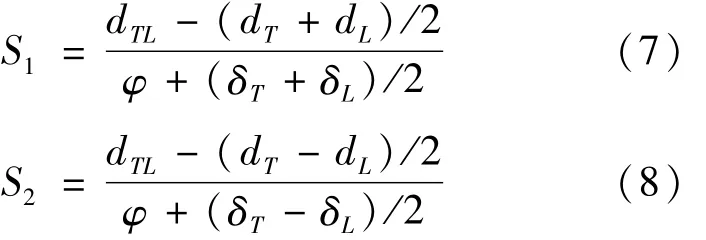
式中:dTL为发射端光轴与接收端光轴的距离;dT为接收望远镜的直径;dL为发射端的光斑直径;φ为发射端和接收端之间的倾斜角;δT为接收端的视场角;δL为激光的发散角。将雷达系统具体参数代入式(7)、(8)中,计算得到本系统的起始汇合点S1和完全重合点S2分别为6.4 m和9.6 m。
几何重叠因子Y(R)随着距离的变化趋势可以通过另一理论计算公式分析得出,在过渡区域发射端光斑和接收端接收区域的重合面积为[19]:

其中 1和 2分别为[19]:
式中:d为距离R处接收光斑光轴和发射光斑光轴距离;dLR在距离R处光斑直径;dTR为距离R处接收端的接收光斑直径,从而计算得几何重叠因子可表示为[20]:

代入本文激光雷达系统的具体参数,得到具体计算结果如图3所示。
该理论计算方法不能得出具体的起始汇合点S1和完全重合点S2的值,但是不难从图3中得出:在6.48 m以前,几何重叠因子为0,而后逐渐增大,直到9.5 m之后几何重叠因子为1,2种方法计算得到起始汇合点S1和完全重合点S2的值基本相符。因此,本系统在实验过程雾到激光雷达系统的距离必须大于9.6 m,从而保证反演结果的有效性。
图3 几何重叠因子随距离变化计算结果
4 实验结果分析
由于受环境条件的限制,实验在室内进行,实验方案如图4所示,小型米散射激光雷达系统发射的激光和墙面成一定角度入射到雾团上。一部分激光通过雾团后将倾斜入射到墙面,分别安装在相互垂直的墙面上的两面平面镜,将这部分激光通过两次反射后射向另一个方向,从而消除了墙面回波信号对雾回波信号的影响;另一部分激光被雾团反射后被激光雷达的接收系统接收。激光雷达系统与雾团的距离为10.5 m,大于几何重叠因子的完全重合点,保证了雾回波信号的有效性。
图4 实验方案示意图
如图4所示,实验用雾为人工造雾,通过雾发生器向指定点喷射雾团,再测量雾消光系数的变化,因此雾的浓度变化趋势为由强变弱的过程。图5为示波器实时存储的小型米散射激光雷达系统对雾进行一次探测得到的原始信号图。其中,曲线1为系统的基准信号,曲线2为雾的回波信号,其回波强度电压值为65.76 mV,脉宽13 86 ns。

图5 原始信号图
利用示波器波形存储功能可将雾回波信号以excel格式保存提取,通过USB线将excel数据提取到计算机,通过Matlab软件读取数据并对雾回波信号进行重建,其结果如图6所示。
图6 回波信号重建图
将重建回波信号结合式(5)和式(6)进行时间平方矫正得到矫正信号曲线图,如图7所示。基于Coliis斜率法对时间平方矫正曲线S(t)和飞行时间t采用最小二乘法做S(t)=at+b形式的线性拟合,可得:a=-6.433 7×106,b=-44 524 1。即图7曲线拟合得到的曲线斜率为-6.433 7×106,将曲线斜率除以光速c得到消光系数值0.021 4 m-1,最后结合式(2)计算得到雾的能见度值182.38m。
表2为不同时刻测量得到雾的消光系数和能见度值,随着时间的增加,曲线的斜率值逐渐增大,所得的消光系数值减少,雾的能见度值增大。
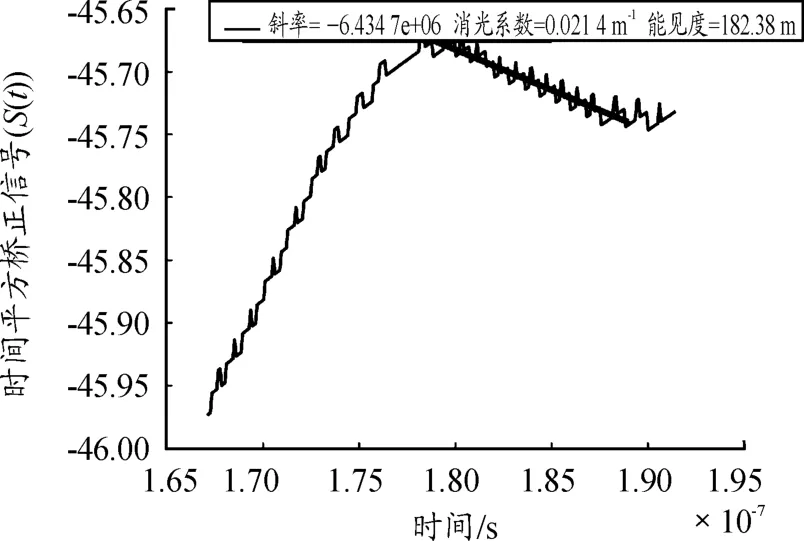
图7 时间平方矫正信号图
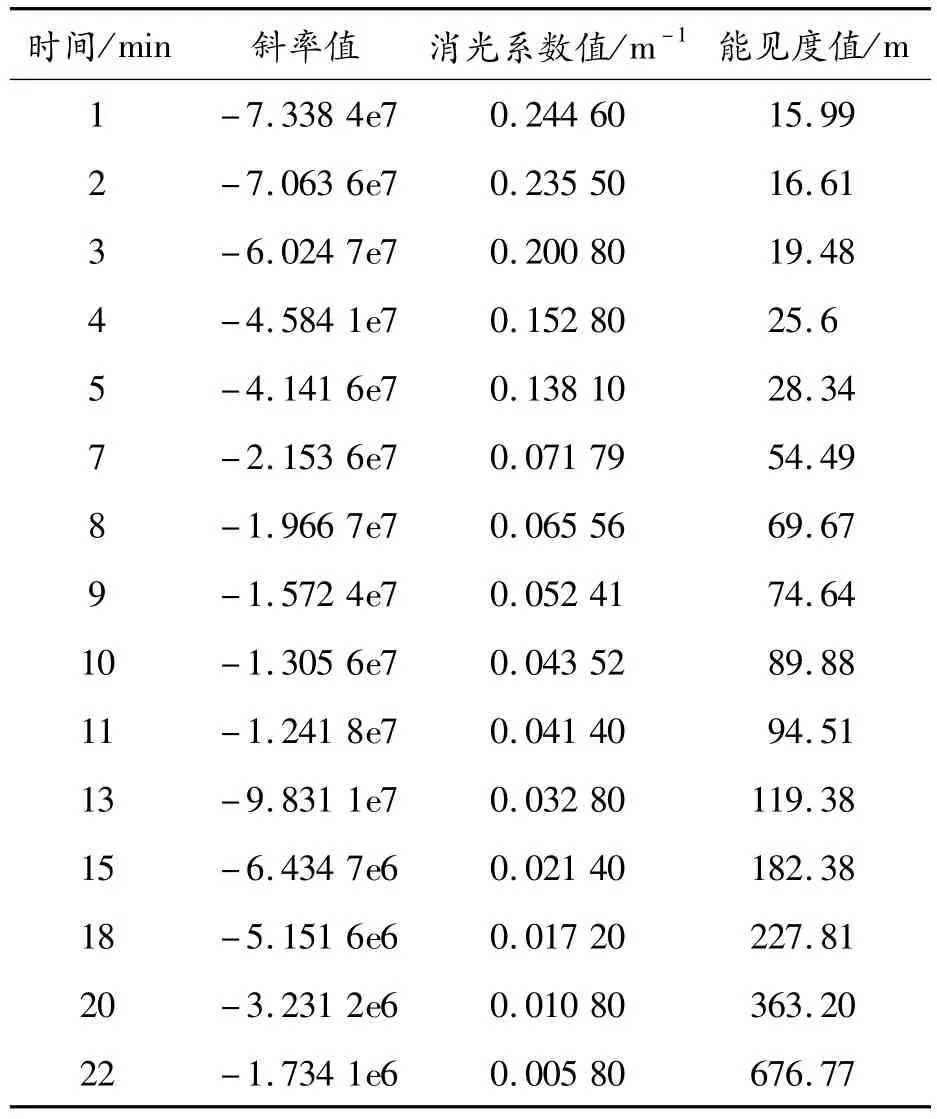
表2 雾消光系数及能见度值
根据表2绘制的雾消光系数和能见度随时间变化趋势如图8所示。
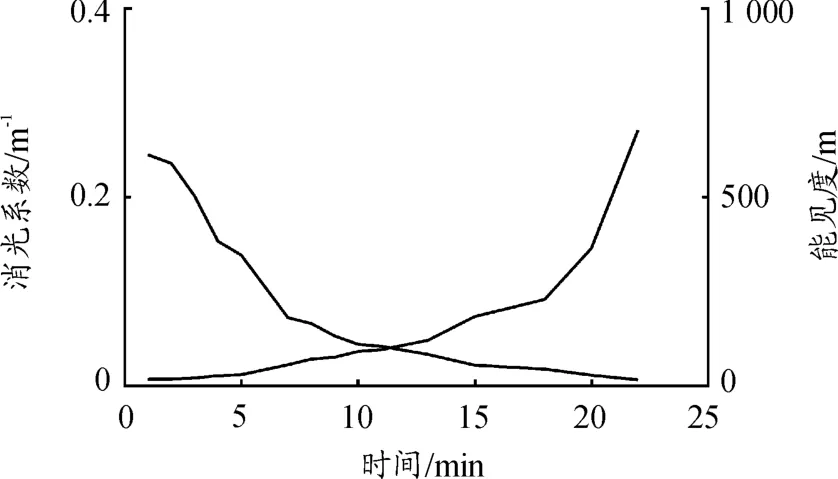
图8 雾消光系数和能见度随时间变化趋势
可以看出:随着时间的增加,雾的浓度逐渐降低,其消光系数值也随之变小,而雾的能见度逐步上升。这与实际情况相符合,说明该小型米散射激光雷达设计是可行的、合理的。
5 结论
设计了探测雾中能见度的小型米散射激光雷达系统,利用准直镜代替了传统的发射望远镜,使用3个透镜组合作为激光接收系统,实现了系统的小型化和紧凑化,激光器模块和雪崩探测器模块的使用降低了系统复杂性。给出了系统中激光发射系统和激光接收系统的主要参数,计算了雷达系统的几何重叠因子,采用Collis斜率法确定雾的消光系数以及能见度,得出雾的能见度随时间变化曲线,实验结果证明了小型米散射激光雷达系统的有效性和合理性。
