基于粒子群算法的汽车多目标自适应动态规划系统研究
2021-02-28覃庆环



摘 要:我国的经济发展促进了各行各业发展,汽车产业也是其中之一,汽车产业的发展导致道路上的汽车越来越多,为提高汽车的安全性,减小汽车能耗,文章设计基于粒子群算法的汽车多目标自适应动态规划系统。硬件部分设计PID控制器和SPC5644A芯片,软件部分设计汽车多目标自适应动态规划框架,基于粒子群算法构建汽车自适应动态运动模型,设计汽车自适应规划函数,实现汽车多目标自适应动态规划。
关键词:粒子群算法;汽车;多目标;自适应;动态规划
中图分类号:TP273 文献标识码:A文章编号:2096-4706(2021)16-0032-03
Research on Vehicle Multi-objective Adaptive Dynamic Planning System Based on Particle Swarm Algorithm
QIN Qinghuan
(Guangxi Modern Polytechnic College, Hechi 547000, China)
Abstract: Our country’s economic development has promoted the development of all walks of life, and the automobile industry is one of them. The development of the automobile industry has led to more and more cars appear on the road. In order to improve the safety of cars and reduce the energy consumption of cars, this paper designs the vehicle multi-objective adaptive dynamic planning system based on particle swarm algorithm. The hardware part designs the PID controller and SPC5644A chip, the software part designs the vehicle multi-objective adaptive dynamic planning framework, builds the vehicle adaptive dynamic motion model based on the particle swarm algorithm, designs the vehicle adaptive planning function, and realizes the vehicle multi-objective adaptive dynamic planning.
Keywords: particle swarm algorithm; vehicle; multi-objective; adaptive; dynamic planning
0 引 言
經济发展带动了汽车产业发展[1],汽车产业的快速发展引发环境污染、能源危机等问题。如何减少交通事故,提高汽车的安全性能,解决交通拥堵问题,减少汽车尾气污染,提高能源利用率是世界各国政府和公民关注的热点问题。目前,汽车制造商开发了ABS、ESP、新能源等技术,使车辆更安全、更节能,提高车辆安全性和经济性[2],减少车辆带来的能源问题,也为汽车产业的发展提供了新方案。目前,自适应巡航系统已经引入市场[3],应用范围和领域逐渐扩大,若自适应动态规划巡航系统在各个领域全面实施,交通事故可减少50%以上,因此对汽车产业安全健康发展具有重要意义。研究表明[4],当前的多目标自适应动态规划巡航系统具有一定的局限性,而粒子群算法刚好能解决目前的限制问题,因此本文基于粒子群算法设计汽车多目标自适应动态规划系统。经实验验证,设计的自适应动态规划系统的控制效果良好,证明系统的性能良好,具有可靠性。
1 硬件设计
1.1 PID控制器
汽车在驾驶过程中,需要使用非常复杂的非线性系统,由于汽车在行驶过程中容易受到其他外界环境影响[5],因此,使用PID控制也不能实现完全控制,导致快速巡航控制的效果和系统响应状态不够稳定,因此本文将模糊控制理论合理应用到电动汽车的自适应巡航控制中[6]。PID控制器的结构非常适用于目前的自适应动态巡航系统,能够建立简单、稳定、可靠和准确的控制系统模型,对于复杂的非线性系统,传统的PID控制器往往不能达到预期的效果。随着科学技术的发展,模糊控制的应用越来越广泛,各种模糊控制器也应运而生。本文设计的系统选用参数不断更新的模糊PID控制器,在该控制器中,所有的参数都可以通过自适应调整,使控制效果达到最佳状态,在一定程度上有效地提高控制鲁棒性。
1.2 SPC5644A芯片
汽车多目标自适应动态规划控制系统的主要功能就是控制,因此就必须在系统中安装符合控制核心的芯片,本文选取SPC5644A芯片作为多目标自适应规划控制系统的主芯片,该芯片具有很多优点,例如体积小、内存大、控制效果好,灵敏、符合控制要求,提供高达4 MB的可编程非易失性闪存,可用于存储命令或数据,并支持64位数据总线命令,满足车辆控制器设计要求并添加后续功能等,将该芯片加入设计的控制系统中,可以成功提升系统的控制能力,增加系统的敏感性,同时能降低系统的控制成本,实现多目标自适应动态规划,具有应用价值。
2 软件设计
2.1 设计汽车多目标自适应动态规划框架
首先需要在动态规划系统中添加多目标自适应策略框架,利用该框架输入控制序列,实现初步控制,该框架设计时首先需要参考控制序列的优化算法,将优化后的序列参数输入规划系统,得出初次规划序列,基于此,设计的规划框架如图1所示。
由图1可知,该框架是实现自适应巡航微分动态规划算法的基础,首先根据汽车动态规划指标设计汽车动态规划序列,其次由于设计的控制序列存在权重稍大的问题,在根据标准控制序列进行修改,此时计算修改后控制序列产生的控制矩阵数值,使用Z-sigmoid方法驱动控制系统,由于汽车在不同的运动状态下面临的离散参数不同,因此应设计一个满足汽车各个离散状态要求的函数,进行求解,实现车辆自适应动态控制,获得控制序列的修正矩阵,为后续模型的建立作基础。
2.2 基于粒子群算法构建汽车自适应动态运动模型
根据上文设计的规划框架可以构建汽车的自适应动态模型,预测车辆未来的运动状态,本文的决策方法是基于已知的环境。假设在已知的环境感知层中,通过图像、地图和定位方法获得其在环境中的位置,并提取道路中心线在全局坐标中的坐标点。在不同的汽车运动状态下,自适应动态规划模型决策的方向也存在差异,在某些稳定的环境下设计的决策也较稳定,反之在某些较敏感的动态环境下,需要综合考虑自适应运动的综合环境,由于车辆坐标系中的轨迹规划将简化后续计算,因此需要在每个决策周期中转换路径坐标并旋转车辆坐标,使用定位等技术提取汽车运动的坐标点,此时绘制的坐标变换示意图如图2所示。
由图2可知,此时的坐标变换矩阵刚好可以用来预测汽车的未来运动方向,此时,根据坐标变换示意图,基于粒子群算法设计的汽车自适应动态运动模型如式(1)(2)所示。
(1)
(2)
模型(1)(2)中,Trans代表旋转矩阵,φ代表旋转角度,X、Y、XO、YO均代表坐标系。可以根据车辆所在的坐标系状态,拟合车辆运动路径,减小车辆动态运动偏差,由于此时的误差未完全消除,可以使用粒子群算法,进行再次离散,得到优化后的预测模型如公式(3)所示。
(3)
式(3)中,此时的模型经过优化已经完全去除了误差影响,规划的车辆运动路径也满足车辆运动需求,为构建后续的自适应规划函数做参考。
2.3 设计汽车自适应规划函数
建立了汽车自适应动态规划模型后,对汽车运动时的轨迹进行研究,发现汽车在自适应规划运动后仍然存在某些问题,如跟车的快速性,側向稳定性、舒适性和燃油经济性不稳定,其中,经济性和舒适性的评价指标有很大的一致性,横向稳定性、安全性和舒适性也有一定的一致性。然而,快速性往往与其他评价指标相矛盾,容易导致汽车的安全性能不满足目前的自适应动态规划需求,因此为了保证多目标自适应规划后的系统符合现有的安全性评价要求,首先需要根据汽车运行时的侧向轨迹计算运动参数,然后再使用该参数构建自适应规划函数,如公式(4)所示。
J=(FDistanceDesire-FDistance)2 (4)
函数(4)中,FDistance代表碰撞力,Desire代表加权系数,本文设计的综合代价函数可以确保预测时域的车间距离,来确保车辆的安全性,保证汽车自适应动态运动的稳定性。
2.4 实现汽车多目标自适应动态规划
汽车多目标自适应动态规划的实现还应保证汽车的横向稳定性,车辆纵向和横向动力学具有相互干扰性,会使车辆纵向加减速,影响车辆横向稳定性。由于悬架轮胎和其他弹性元件的存在,车辆运行期间纵向加速度的变化将导致前后轴之间的负载转移。对于特定的轮胎侧滑角,由于载荷转移而增加的法向力将增加侧向力,从而导致车辆偏航。由于轮胎横向力和纵向力是基于相同的接触面产生的,因此轮胎胎面中每个轮胎产生的纵向力和横向力之和的极限值是恒定的。当轮胎受力达到饱和时,纵向和横向的轮胎受力形成剧烈的组合,必须减小一个方向的力来满足另一方向力的需求。在实践中,横向稳定性评价的方法有多种,本文采用轮胎侧偏角法进行车辆的稳定性评价,计算轮胎角度保证横向力的稳定性,实现汽车的多目标自适应动态规划。
3 系统测试
为了测试本文设计的基于粒子群算法的汽车多目标自适应规划系统的性能,搭建系统测试平台,检测汽车自适应规划的效果,进行测试如下。
3.1 测试准备
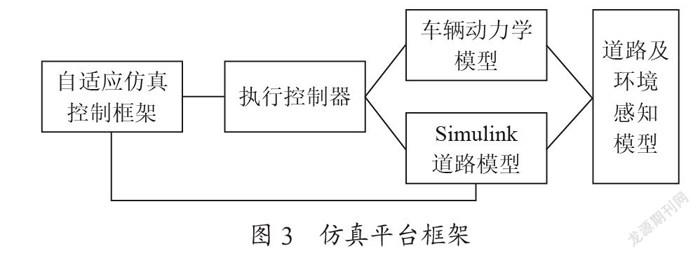
使用MATLAB/Simulink软件搭建汽车多目标自适应规划系统的仿真测试平台,选用ADV ISOR2002下的“PARALLEL_defaults_in”车辆作为研究对象,选取符合该仿真平台的测试参数,进行仿真,基于此,设计的自适应仿真平台框架如图3所示。
根据图3的仿真平台框架,可以建立仿真模型,选用Carsim作为车辆模型,模型的参数如表1所示。
由表1可知,此时车辆模型参数中的各个数值都处于稳定状态,符合车辆模型参数标准,可以从该表中提取两车的相对距离等信息。
3.2 测试结果与讨论
使用本文设计的系统进行自适应巡航仿真,保持动态规划巡航系统的工作状态,记录规划系统的控制效果,如图4所示。
由图4可知,此时的控制目标与控制距离均与标准的控制目标拟合,证明设计的自适应动态规划系统的控制效果良好,证明系统的性能良好,具有可靠性。这是因为本文设计系统在动态规划系统中添加多目标自适应策略框架,参考控制序列的优化算法,使用Z-sigmoid方法驱动控制系统,实现车辆自适应动态控制,以提高系统的各项性能。
4 结 论
综上所述,设计自适应规划巡航系统不仅可以增加汽车行进的安全性,还能减少能耗,提升汽车的控制效果,因此为了保证巡航系统的自适应动态规划效果,基于粒子群算法构建了汽车自适应动态运动模型,设计了汽车多目标自适应规划系统,进行系统测试,测试结果表明,设计的自适应动态规划系统的控制效果良好,具有可靠性,有一定的应用价值。
参考文献:
[1] 陈思荣,陈贞丰,肖应旺,等.基于自适应动态规划的非线性系统最优跟踪控制 [J].广东技术师范学院学报,2019,40(6):26-31.
[2] 王亚楠,吴杰康,毛晓明.基于随机动态规划的多能联供系统冷热电经济分配模型 [J].电力自动化设备,2019,39(6):21-26.
[3] 朱永强,王甜婧,许阔,等.基于动态规划-遗传算法的混合储能系统实时协调调度和经济运行 [J].太阳能学报,2019,40(4):1059-1066.
[4] 张天一,成庆林,黎志敏,等.基于动态规划法及相似理论的输油泵系统调配优化 [J].西安石油大学学报(自然科学版),2020,35(3):77-85.
[5] 蒲俊,马清亮,李远冬,等.基于数据驱动自适应动态规划的输入约束的非线性系统H_∞控制 [J].电光与控制,2019,26(7):40-45.
[6] 安宝利,刘大刚,王建军,等.论日照港防抗台期间港作锚泊船风险动态预评估和调度规划系统 [J].中国海事,2020(11):52-55.
作者简介:覃庆环(1979.09—),女,壮族,广西大化人,专任教师,讲师,本科,研究方向:汽车电子。
