基于改进TDOA算法的设计与仿真
2021-02-27吴端坡李俊杰许晓荣刘兆霆
吴端坡, 李俊杰, 许晓荣, 冯 维, 刘兆霆
(杭州电子科技大学通信工程学院,杭州310018)
0 引 言
随着移动通信和无线传感技术的发展,基于位置的服务应用广泛[1]。众所周知,人们在室内环境下的活动时间占据其生活极大比重。人们希望可以获得更加精准的室内位置信息。一种比较常见且简单有效的定位方法是到达时间差(Time Difference of Arrival,TDOA)[2-3]算法,它是一种基于测距的定位方法,通过测量节点间的距离信息来计算节点的位置,其对定位基站与移动目标之间的时钟同步要求不是十分严格。本文选取不要求基站和移动目标之间严格同步的TDOA算法,使得其应用范围更加广泛。
TDOA算法在定位领域广泛应用,但传播信号受非视距等因素的影响,定位精度不可避免地有所降低。为减小定位误差,Kolakowski[4]利用TDOA计算结果以及相应加速度计测量值来优化定位精度。Li 等[5]分析TDOA算法与非视距(Non-line-of-sight,NLOS)的相关性来定位静态目标问题。Choi 等[6]在时间递归的鲁棒最小二乘估计框架下,提出了一种TDOA 位置估计器。该法可以将一组不同时间的测量值递归地组合在一起,产生更精确的定位结果。Yang 等[7]提出了一种考虑视距的TDOA改进方法,引入一个传递函数,将给定接收机的场与源的场作为频率和位置的函数联系起来,缓解了NLOS效应,并将传播通道校准回自由空间。Kim[8]则将障碍物信息考虑进去,提出了一种合理、时间有效的辐射源估计方法。从上述的算法设计中,可以发现它们对定位区域范围、行人最大移动速度等实验环境的固有信息运用很少。本文在TDOA算法的基础上引入了速度受限和区域受限的定位模型,提出基于速度和区域受限的改进TDOA 算法,并在Matlab仿真平台上进行验证。
1 TDOA算法
TDOA[9-10]算法是对到达时间(Time of Arrival,TOA)算法的改进,它不是直接利用信号到达时间,而是用多个基站接收到信号的时间差[11-12]来确定移动台位置,与TOA算法相比,它不需要加入专门的时间戳,定位精度也有所提高。
假定室内基站位置为A1(0,0)、A2(m2,0)和A3(m3,n3),移动目标位置为(xt,yt),t 为采样间隔可得[13-14]:
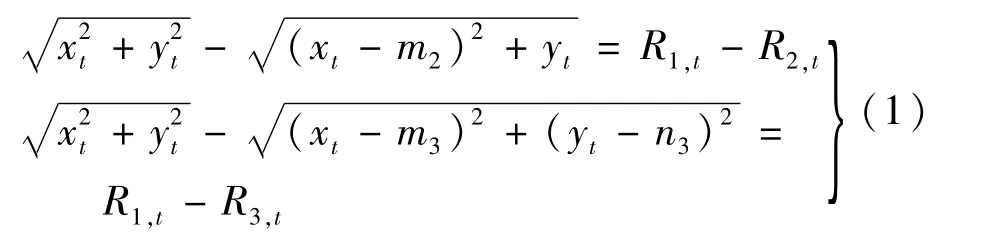
式中:R1,t、R2,t和R3,t分别为基站与移动目标之间的距离。求解式(1)可得目标位置(xt,yt)。
2 改进TDOA算法
2.1 速度受限定位算法
由先验知识可知,实际室内环境是复杂多变的(如错落的桌椅、人流等),人们在室内移动速度缓慢,可视为一种低速的移动状态,即速度受限状态。假设使用速度受限算法优化和未优化的定位结果分别为Tt(xt,yt)和,目标移动轨迹如图1 所示。图中:dt,t-1为Tt和T′t之间的距离;和分别平行于y轴和x 轴,D 为它们的交点。若目标最大移动速度为vmax,采样频率为f,则目标单位采样间隔内的最大移动距离为dmax=vmax/f。
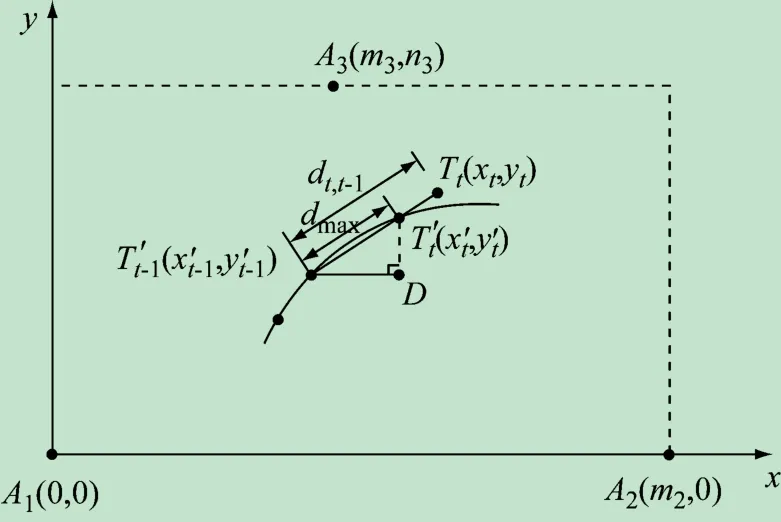
图1 定位目标移动轨迹示意图
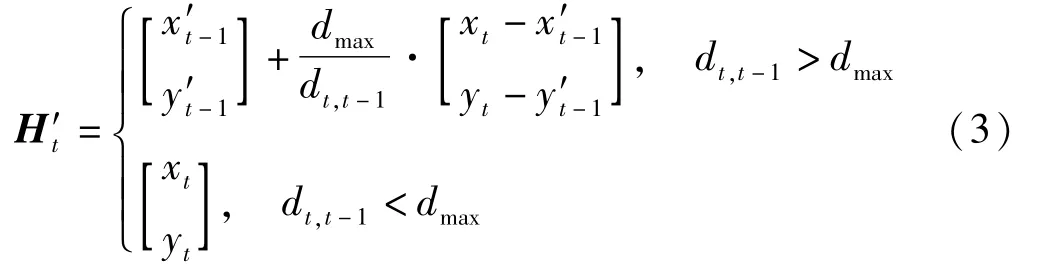
如果dt,t-1的值大于目标的最大移动距离为dmax,那么Tt将会约束到图1 中的T′t点。根据相似三角形定理,可得:

2.2 区域受限定位算法
室内环境中存在有一些不可逾越的障碍,包括床、衣柜和墙壁等。室内环境可以看作是有限的区域。将区域受限定位算法分为内部移动和区域转换两个案例。并将算法的研究场景设置为矩形区域。
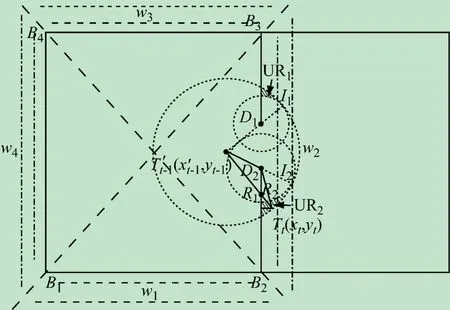
图2 区域受限定位算法分析示意图
分析内部移动场景,算法分析示意如图2 所示。图中:Bi(i =1,2,3,4)为区域边界点;Tt和分别表示使用和未使用区域受限定位算法的定位结果;D1D2为房门;I1和I2分别为射线D1和射线D2与圆T′t-1的交点;R1和R2分别为线段T′t-1Tt与墙壁的交点和线段TtD2与圆D2的交点;UR1和UR2为阴影区域。wi(i =1,2,3,4)根据直线B1B3和B2B4将可移动区域外围分为4 个部分。
若假设目标移动时,不存在房门D1D2,那么根据区域边界的限制,需将Tt点约束到R1,该点即为修正点T′t。根据相似三角形定理,可得:

式中,J 为线段T′tR1和T′tTt的比值。化简式(4)可得:

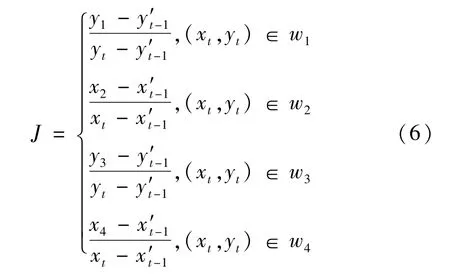
式中,wi(i =1,2,3,4)为目标所在不可移动的区域,可以根据离目标最近两相邻拐点和最小值决定。因而,可得:
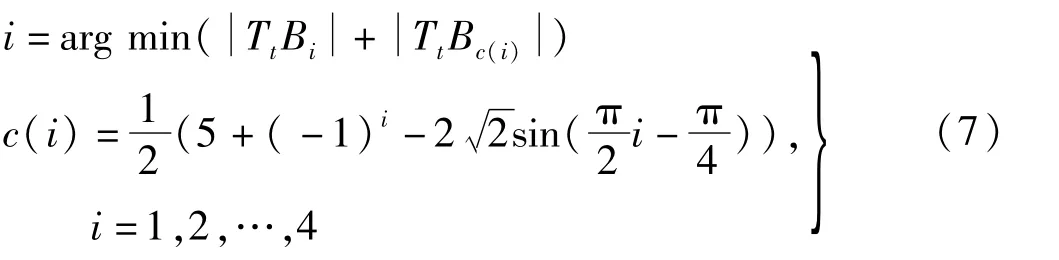
式中,i与c(i)为相邻拐点。
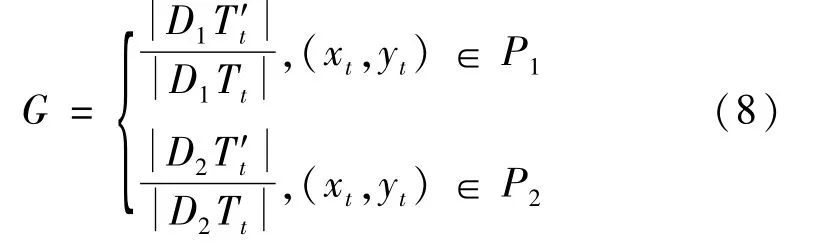
其次,分析区域转化场景下的定位修正方法。若边界B2B3存在房门D1D2,那么目标除了UR1和UR2区域,其他都可能到达。若目标超出可移动区域边界,则将其约束到圆Dk(Dk表示门的边界点,k =1,2)上的R2点,那么该点即为所求的修正点。若G 为线段和DkTt线段的比值,那么G的值为:
式中:
P1和P2为区域UR1和UR2。Pi(i =1,2)的确定可依据目标离门边界点Dk的距离,可得:

设Fi=[gk,hk],根据三角形相似定理可得:

化简可得:

故而,区域受限定位算法可整理为:
式中:w =w1∪w2∪w3∪w4;p = {(x,y)| (x -g1)2+。
2.3 改进TDOA算法
速度受限定位算法适用于区域内部的目标定位,而区域受限定位算法适用于区域边界的目标定位,所以将两种算法融合使用可以更好地实现室内目标的定位功能。利用TDOA算法获得目标定位坐标信息。使用速度受限定位算法分析目标的可移动区域,根据其与上一定位点之间的距离dt,t-1,判断目标点是否超过最大移动距离阈值dmax。若超过阈值,则将目标点约束到同方向、距离上一定位点dmax的位置,该点即为速度受限定位算法的修正结果。将该结果传入区域受限定位算法进行进一步约束,以修正穿墙的异常定位点,并将目标的可移动区域进一步细化,进一步修正定位结果。算法流程如图3 所示。

图3 改进TDOA算法流程图
详细步骤如下:
步骤1使用式(1)计算得目标位置Tt(xt,yt)。
步骤2分析dmax和dt,t-1之间的大小,将Tt的值代入式(3)中修正超出可移动范围的异常值。
步骤3分析|T′tDk|和dmax的大小,若|T′tDk| <dmax,根据式(9)计算k,代入式(8)得到G。将G 和步骤2 中得到的修正值代入式(11)中可得区域受限定位算法优化后的修正值。若|T′tDk|>dmax,则根据式(7)计算i,将其代入式(6)确定J,将J 和步骤2 中得到的修正值代入式(5)得区域受限定位算法优化后的修正值。
步骤4步骤3 中的修正值即为改进TDOA算法的优化结果。
3 实验结果
本文分析了影响定位精度的3 种因素,分别为测量误差、目标最大移动速度和采样频率。本文设置的实验环境为10 m×10 m的正方形区域,实验的测量误差设置为0.1 m,目标的最大移动速度为1 m/s,采样频率为10 Hz。对比算法为TDOA算法。
本实验定位目标的移动轨迹设置为B1-B2-B3,如果分别控制目标的测量误差、采样频率和最大移动速度的变化,可以得到3 组数据进行分析。平均定位误差(Mean Positioning Error,MPE)eMPE与测量误差(Measuring Error,ME)eME变化关系仿真结果如图4 ~6 所示。
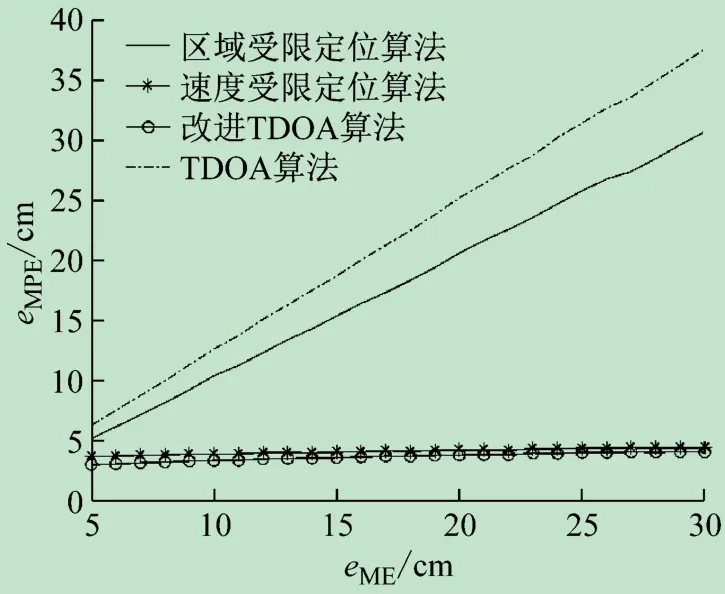
图4 测量误差对定位精度的影响
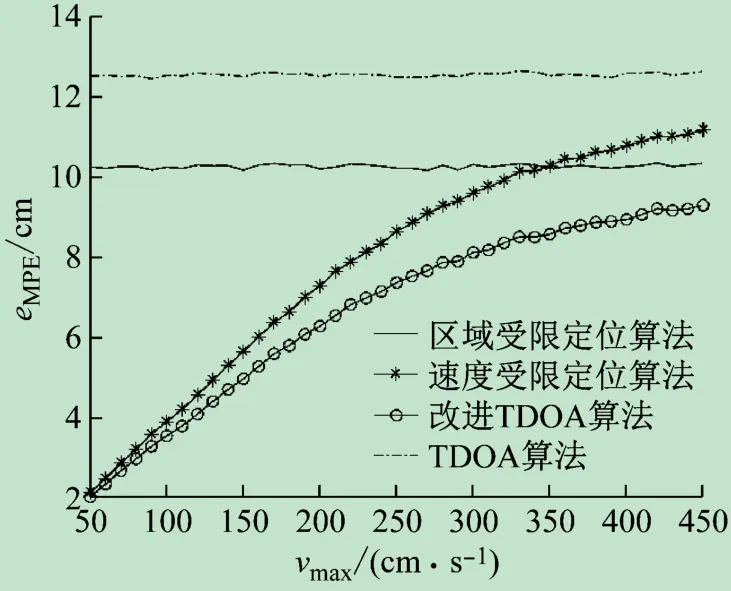
图5 目标最大移速对定位精度的影响

图6 采样频率对对定位精度的影响
由图4 可见,改进TDOA 算法和速度受限定位算法受测量误差的影响不大,而区域受限定位算法和TDOA算法则随测量误差的增大而增大。改进TDOA算法平均定位误差一直保持最小,定位精度最高。
由图5 可见,改进TDOA 算法和速度受限定位算法都随着移动速度的提高而不断增大,而区域受限定位算法和TDOA算法则不受移动速度的影响,基本保持不变。明显可以看到改进TDOA算法有着最好的定位精度。
由图6 可见,改进TDOA 算法和速度受限定位算法都随着采样频率的提高而不断减少,而区域受限定位算法和TDOA算法则不受采样频率的影响,基本保持不变。总体而言,改进TDOA 算法的平均定位误差最小,定位精度最高。
总之,当测量目标的测量误差、目标最大移动速度和采样频率发生改变时,改进TDOA 算法都保持这最低的平均定位误差,有着最高的定位精度,减弱了非视距等环境因素对定位精度的影响。
4 结 语
本文提出了一种基于速度受限和区域受限的改进TDOA算法。仿真结果表明,该算法可以明显改善非视距等环境因素对TDOA算法定位结果的影响。并且通过对改进TDOA算法的虚拟仿真,可以启发学生对实验仿真方法和改进方法的思考。