中高压软启动控制器的设计
2021-02-27王党树王新霞娄嘉南
王党树, 王新霞, 娄嘉南
(西安科技大学a.电气与控制工程学院;b.理学院,西安710054)
0 引 言
电动机是现代工、农业生产和交通运输的重要设备,据统计,三相异步电动机动力设备占据一定比例,目前生产现场用到的异步电动机,启动方式大都采用的是直接启动,直接启动方式不需要外围控制电路、操作简单且启动转矩相对较大[1]。因此在电网允许条件下,大部分电动机依然采用的是直接启动[2]。异步电动机在额定电压下直接启动时的启动电流约为额定电流的5 ~7 倍。由于启动电流大,会使电网电压短时间内降落很多,造成电动机起动转矩减小很多,启动困难,还影响电网上其他设备的正常运行[3];同时过大的启动电流将会在电动机轴上产生过大的电磁转矩,对电动机的冲击会造成电动机不同程度的损坏。因此在电动机频繁启、停的生产设备中,要获得较好的启动曲线,需要在电动机启动过程中加入软启动环节[4]。软启动器(soft starter)是一种基于交流调压器原理,集电动机软启动、软停车、轻载节能和多种保护功能于一体的电动机控制装置。软启动器相对于传统的启动方式,具有无级调节、冲击转矩和冲击电流小的优点[5]。文献[6]中利用改变电源电压频率实现软启动。文献[7]中引入电流闭环控制,使电动机在启动过程中保持电流恒定,以确保电动机平稳启动。目前软启动器启动方式有:限流软启动、电压斜坡软启动、转矩控制软启动等方式[8]。本文采用PI 控制器控制的软启动方式,相比于其他方式具有抗扰性高、作用速度快、误差小等优点。
1 晶闸管软启动方案
晶闸管软启动原理:实时检测电动机启动时电流值,送入TMS320F28335 控制器中,并与电动机启动后平稳运行电流值做差,对该差值进行PI 调节后输出PWM信号,该信号经整形放大后,在同步信号作用下控制串联在电源与电动机之间晶闸管的导通,使电动机电压由零平稳上升至三相异步电动机额定工作电压,启动电流在安全值范围内。
根据启动原理,晶闸管软启动方案如图1 所示:主要由晶闸管、电压检测回路、触发驱动电路、控制器等组成[9]。此外设计实现故障检测、过压、欠压保护的功能[10]。

图1 晶闸管软启动系统原理框图
2 软启动器的硬件组成
如图2 所示。利用电容两端电压不能突变的特性,可以有效地抑制过电压[11]。系统主电路是由三组反并联晶闸管组成的三相调压电路。在双向晶闸管和三相电源之间接入接触器,在软启动过程中,接触器断开,软启动完成后接触器闭合。同理,在软停车过程中,接触器再次断开,软启动器投入到停车运行。为防止过电压烧坏晶闸管,在每对反并联的晶闸管两端并联阻容吸收回路。
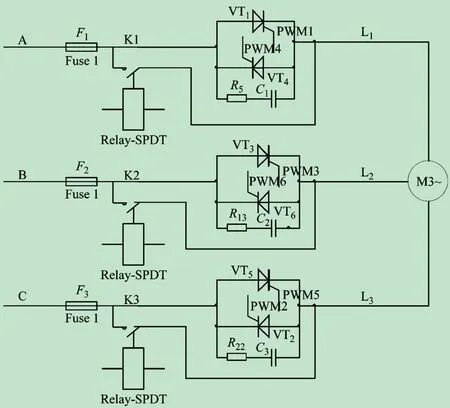
图2 软启动器主电路图
2.1 同步信号检测
在三相调压电路主回路中,触发角α 的起始位置与软启动器的控制有着紧密的联系。为保证各个晶闸管的触发脉冲与其阳极电压保持严格的相位关系,同步检测是软启动器设计中必不可少的一个环节[12-13]。同步检测电路由电压比较器、光电耦合器等组成,如图3 所示,电压比较器采集电压过零点,当电网电压由零变正时,比较器输出高电平,光电耦合器截止,DSP 控制器引脚接收到高电平;同理当电网电压由正变负时,比较器输出低电平,光电耦合器导通,DSP控制器引脚接收到低电平。
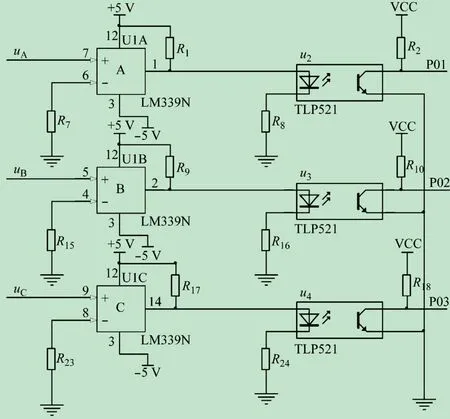
图3 同步信号检测电路图
2.2 脉冲整形及放大回路
晶闸管的触发是软启动器的重要部分,能否及时、有效的触发晶闸管是实现软启动的关键[14]。脉冲整形与放大电路如图4 所示,由DSP 的PWM 模块产生具有一定相移的6 路PWM 信号,经三极管放大,脉冲变压器驱动后,输出具有一定功率的触发信号到晶闸管的门极,如果此时晶闸管两端的电压为正,则晶闸管在门极控制下导通。图中D1为反向保护二极管,用于防止Q1关断时脉冲变压器释放磁场储能所形成反向电压加到晶闸管的门极。R5、C2可提高抗干扰能力,降低门极输入阻抗,C2越大,脉冲前沿陡度越差,故C2不宜太大,一般取C2=0.01 ~0.1 μF,R5=100 Ω左右。
为了防止脉冲变压器饱和以及缩短续流时间,续流回路中的二极管的稳压值应该尽量大一些。脉冲变压器副边的二极管回路确保了一组正的脉冲信号输出。该回路中脉冲变压器具有功率放大和隔离的作用。

图4 晶闸管触发回路
2.3 接触器控制回路
接触器控制回路是在软启动完成以后,通过接触器控制回路把软启动器从三相工频电源退出来,使软启动器只工作在电动机软启动和软停车时,以提高软启动器的使用时间,延长它的寿命。
接触器控制回路一般需要较大的驱动功率,因此采用的两级驱动方式,首先通过DSP的输出驱动继电器,再通过继电器驱动三相交流接触器。DSP 通过三极管驱动继电器,通过继电器的动作来控制交流接触器线圈得电,从而控制通断[15]。
3 系统主程序
主程序主要完成系统检测、变量初始化、参数修改、故障诊断、系统保护等任务,如图5 所示。
3.1 脉冲触发同步信号程序
触发模块与电源周期的同步在脉冲的产生中有着非常重要的作用。只有正确的同步信号才能保证可靠、有效的触发晶闸管,从而保证软启动的顺利完成。系统通过中断子程序触发晶闸管导通,以确保触发与电源周期同步。中断子程序流程图如图6 所示。
3.2 限流软启动控制算法
在本系统中,针对电动机在不同场合运行所要求的参数不同,简单的增量式数字PI调节是非常适合的控制方法,即
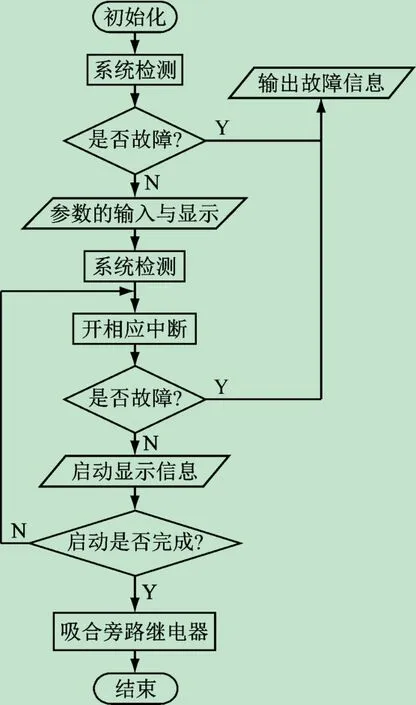
图5 主程序流程图
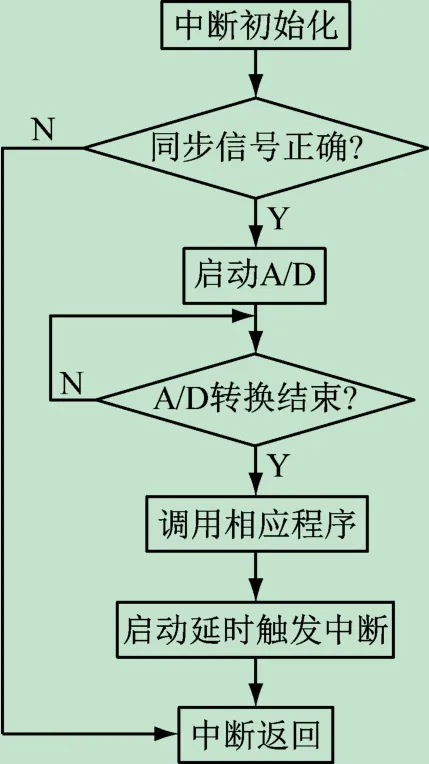
图6 中断子程序流程图

式中:un为第n次采样时刻的计算机输出值;un-1为第n-1 次采样时刻的计算机输出值;en为第n 次采样时刻输入的偏差值;en-1为第n -1 次采样时刻输入的偏差值;Ki为积分系数;Kp为比例系数。
电流计算子程序通过调用PI 子程序对给定电流信号和反馈电流信号进行PI控制算法运算,其输出对应晶闸管的触发角,电流环的两个输出限幅值(上限幅和下限幅)对应晶闸管触发角的最大值和最小值。在触发角小于功率因数角时,系统事实上已经没有调压作用,输出的下限幅值应该取电动机额定运行时的功率因数φ 值,约为30°,输出的上限幅值为150°[1]。
在本系统中,电动机启动的电流限幅值可以设置为1.0 ~4.0In,In可调。电流计算程序如图7 所示,调节器的比例、积分系数选择上要综合动态和静态来合理设置限流起动过程中的PI 参数,在限流起动时,要求电动机电流在最短的时间内,响应到设置的最大允许电流值,并努力维持该最大允许电流值,PI 参数不能太小,否则电动机电流的响应太慢,甚至无法启动。
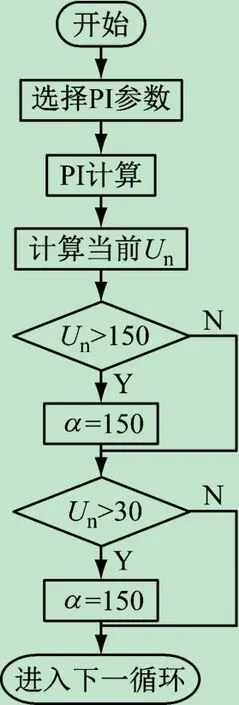
图7 电流PI程序流程图
4 仿真与实验
为验证设计方案进行了系统仿真,如图8 所示,主要由三相电源、脉冲发生器、晶闸管、异步电动机、PI控制模块、测量模块等组成。图9 所示为VT14 输出触发信号波形和电压波形。
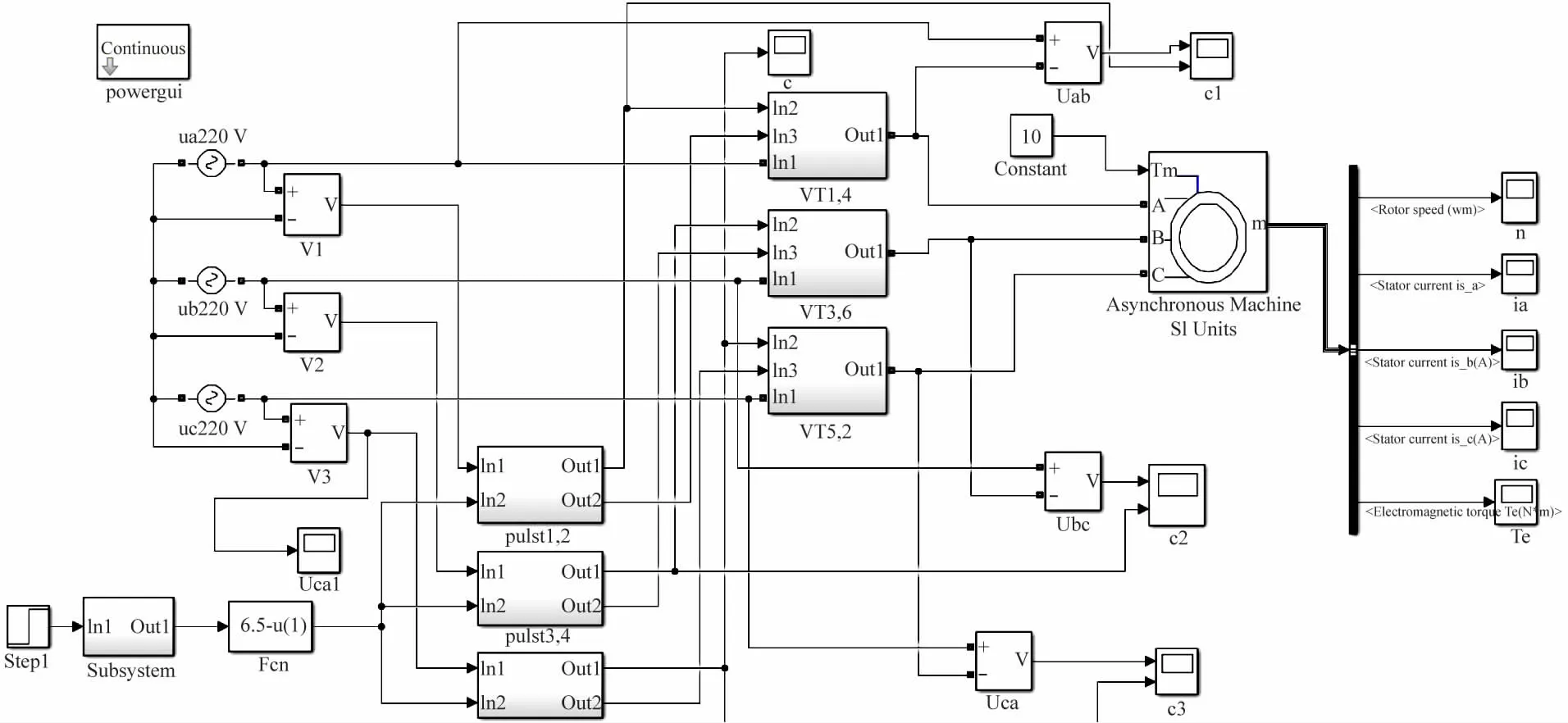
图8 Matlab仿真程序图
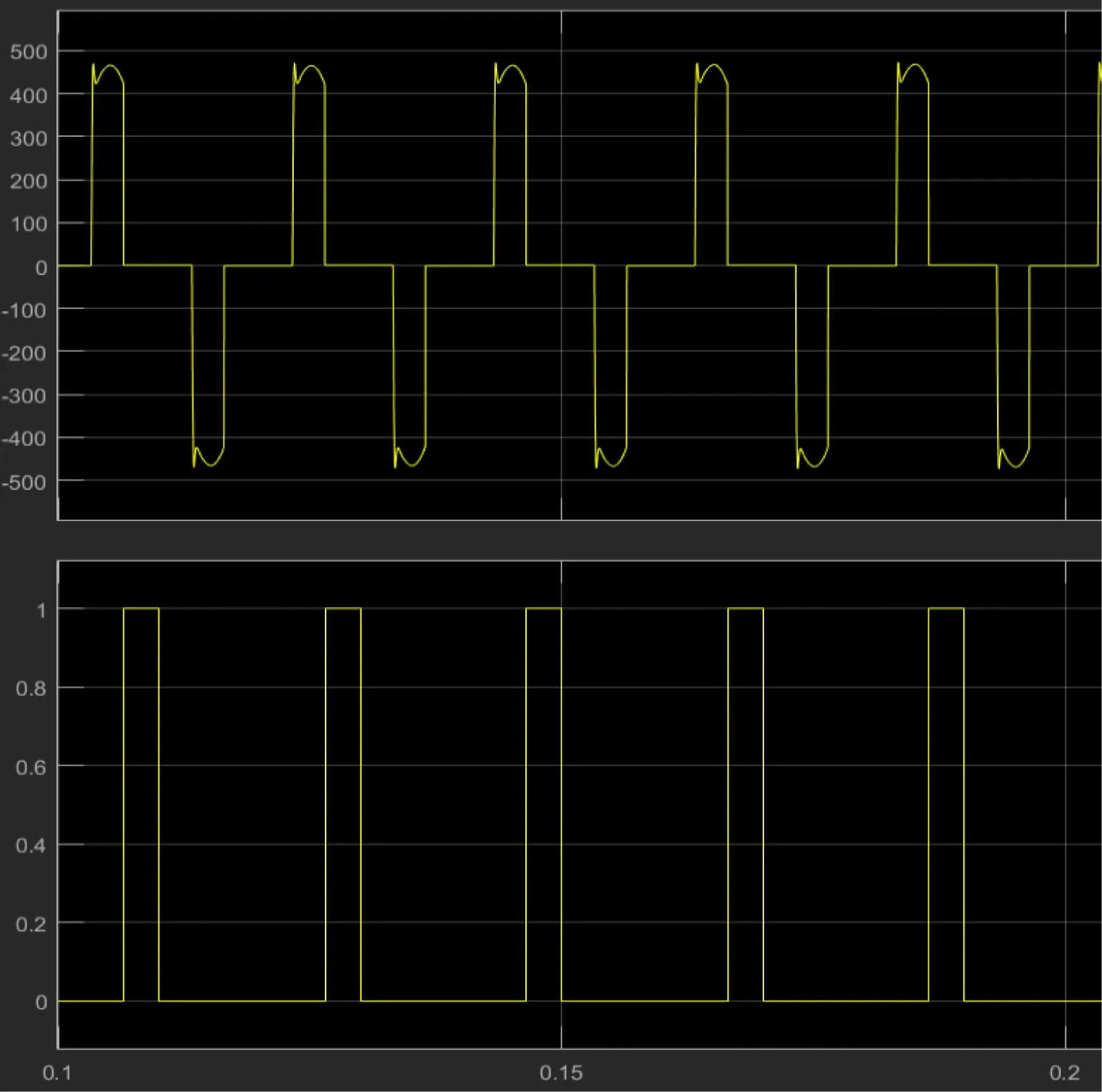
图9 VT14输出触发信号波形和电压波形
在负载容量为PL=15 kW的条件下,电动机的启动电流如图10 所示,软启动的峰值电流为30 A,直接启动电流为118 A,如图11 所示,通过对比,发现软启动电流值比直接启动电流值显著降低,对电网的影响也相对较小。
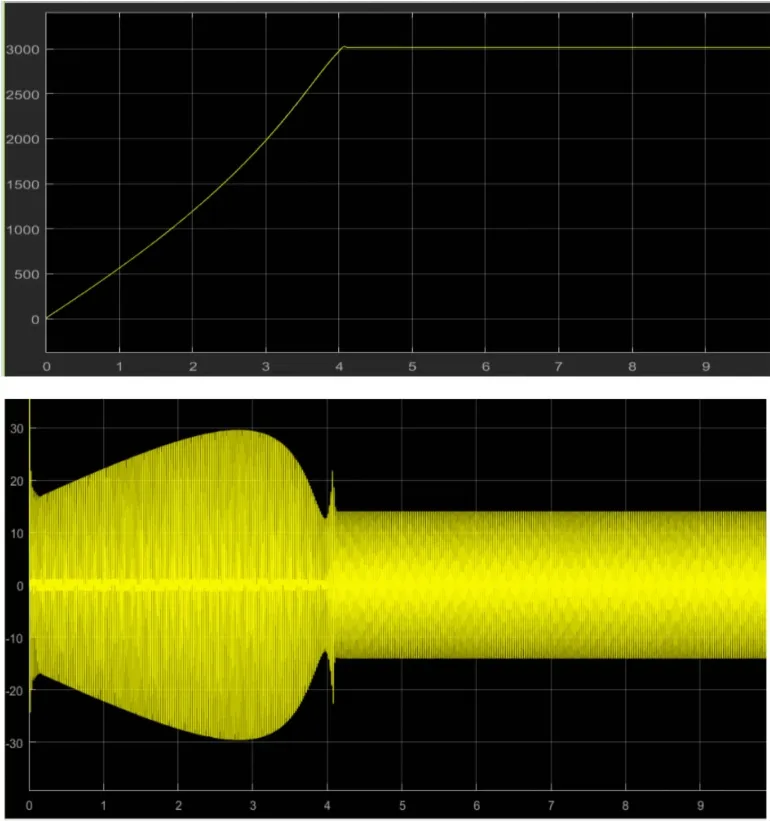
图10 软启动器启动电流及转速波形图
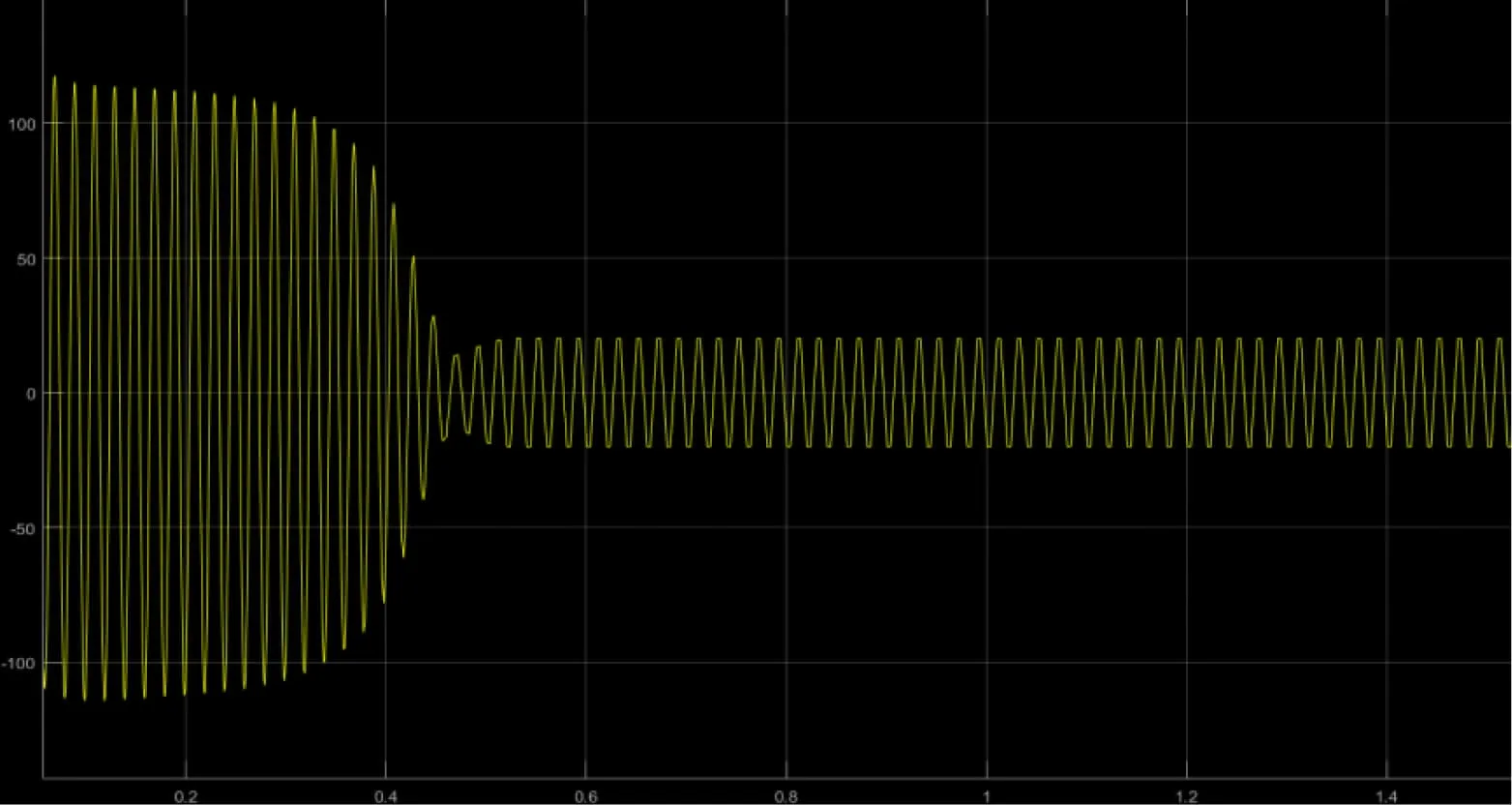
图11 直接启动电流波形图
根据Matlab仿真结果搭建了实物模型进行实验,采用3 kW,额定转速为2 900 r/min,额定电流为6 A,额定电压为380 V的三相异步电动机。启动电流由原来的6.2IN减小到1.4IN,显著地降低了对电网的影响。
5 结 语
本文针对电动机直接启动时由于启动电流过大引起影响电网波动的现象,提出一种限流PI调节降压式软启动方法。通过对该方法进行仿真得出以下结论:
(1)启动电压控制采用PI调节控制,实现了自动调节电动机启动电流,实现了电机平稳软启动;
(2)在相同负载下,电动机直接启动时会产生5 ~7 倍额定电流强度的起动电流,而用软启动方式,启动电流为额定电流2 倍左右;
(3)通过实验验证了本该软启动能够切实减小启动电流对电网冲击;
(4)仿真得出电动机启动电流由原来的7.76IN降低至2.31IN。