地线融冰自动接线装置合闸操作远控方案的研究
2021-02-26徐望圣曹伟伟陆桂来
徐望圣 曹伟伟 谭 劲 陆桂来 颜 艳
地线融冰自动接线装置合闸操作远控方案的研究
徐望圣1曹伟伟2谭 劲1陆桂来2颜 艳1
(1. 中国南方电网有限责任公司超高压输电公司贵阳局,贵阳 550081;2. 南京电力金具设计研究院有限公司,南京 211500)
为了实现对架空输电线路地线的远程融冰,需对地线融冰自动接线装置进行改造。本文首先介绍了装置改造的整体方案和远程控制系统的操作流程,明确合闸操作在整个融冰操作中的重要性;其次通过对比现有的就地合闸操作方式,分析直接进行远程合闸操作可能出现的故障及引起故障的原因;最后提出保留现有控制方式对电机的停转控制和合闸信号的触发,增加合闸时间-电源通断管理和电机运行电流监测等措施来避免事故的发生,铁塔上增设图像采集设备辅助识别合闸状态信息,提高远方判断合闸到位的成功率。
地线融冰;远控改造;合闸信号;电机运转时间;过载电流;定位告警
0 引言
由输电线路覆冰引发的事故严重危害到电力系统的安全运行。尤其严重的是2008年初,我国南方地区遭受百年一遇的特大冰冻自然灾害,全国共有近570个县级线路和14个省级电网的用户供电受到不同程度的影响[1],119条500kV和343条220kV输电线路受冰灾影响而停运,分别占冰灾区同等电压等级线路总条数的19.01%和9.38%[2];因灾造成全国人民直接经济损失高达1 516.5亿元人民币,包括南方电网直接财产损失200亿元以及国家电网公司直接财产损失104.5亿元[3]。
2008年2月开始,南方电网公司对输电线路的融冰方案进行了大量的研究,并且通过在枢纽变电站安装直流融冰装置实现对进出导线的融冰[4]。但是,由于地线本身不通电流,该直流融冰方式不能直接应用于地线,需要使用人工接线的方式将融冰电流从导线引至地线。2013年9月,地线融冰自动接线装置研制成功并挂网运行,大大提高了地线融冰的自动化程度,保障了操作人员的安全。
1 地线融冰自动接线装置的远程控制改造
地线融冰自动接线装置在操作上与隔离开关极为相似,装置的导电杆等同于可旋转的隔离刀闸。图1为装置在铁塔上的布置图。在导电杆的末端通过软铜绞线与铁塔顶部的地线进行连接,非融冰时,装置处于分闸状态,导电杆前端的触头通过锁紧机构悬挂于防护机构中,当需要融冰时,在塔底操作控制箱,传动机构即会带动导电杆向安装在导线上的合流线夹做旋转运动,使导电杆端部上的触头插入合流线夹上的触指,完成合闸,实现导线和地线之间的连接。在确认合闸成功后,通知变电站打开融冰电源进行融冰[5]。融冰结束后,再通过控制箱进行分闸操作,导、地线之间的连接断开。
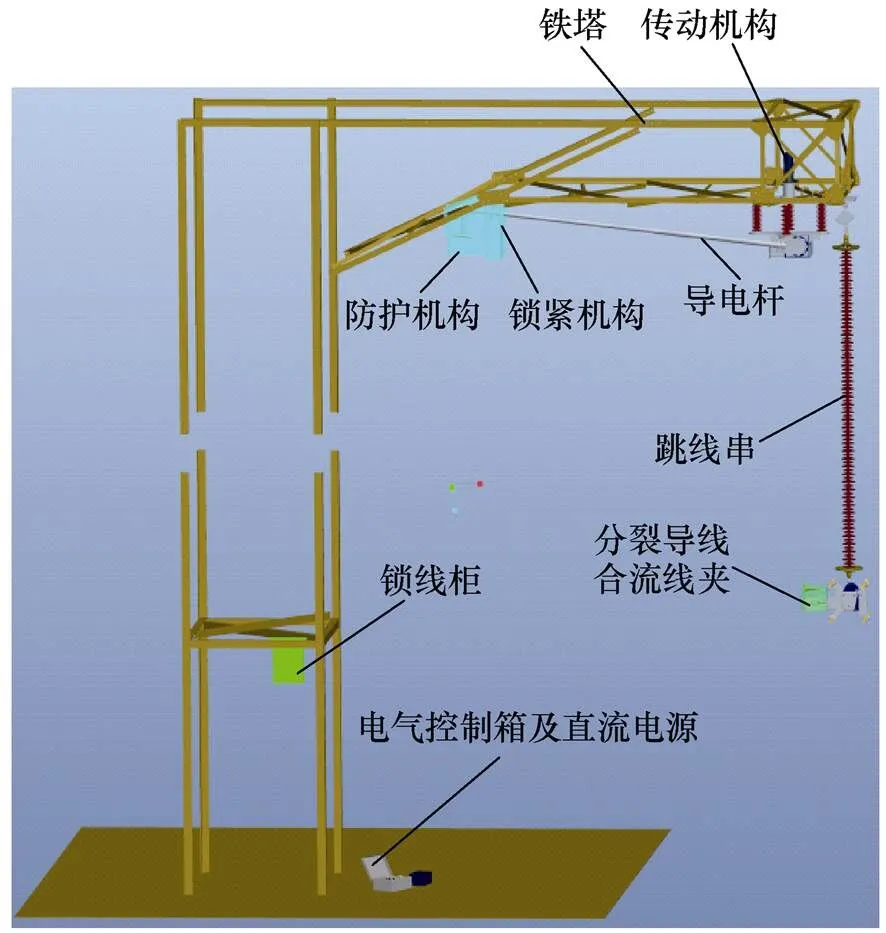
图1 装置在铁塔上的布置图
随着物联网技术和自动化技术在输电行业中的大力推广,电网部门已经可以通过在线监测系统及时发现和掌握输电线路气象环境、导线温度[6]、导线舞动[7]、线路覆冰[8]、杆塔倾斜[9]、人为破坏和异物入侵等情况,同时也实现了对巡线无人机、电力巡检机器人[10]等设备的远程控制。通过多年的理论研究和实际应用,对于线路设备状态参数和信号的在线采集、无线远程传输和监控系统的建立,完成了一定的技术储备。在此基础上,2018年南方电网公司发布了《防冰抗冰三年行动方案》,指出要研究和推广应用防冰智能技术,其中,对于地线融冰自动接线装置,提出要实现远程控制和操作,并由超高压输电公司作为责任单位施行。
拟进行的装置远控改造,形成的系统网络拓扑如图2所示。在铁塔侧布置传感设备、控制设备、加解密装置、风光互补电源系统等,变电站布置服务器、控制主机以及与铁塔侧对应的加解密装置等。铁塔侧的采集终端和电机等设备与主控制箱连接,主控制箱通过定向的APN专网与运营商路由进行通信,再通过数据专线实现运营商路由到服务器的连接。
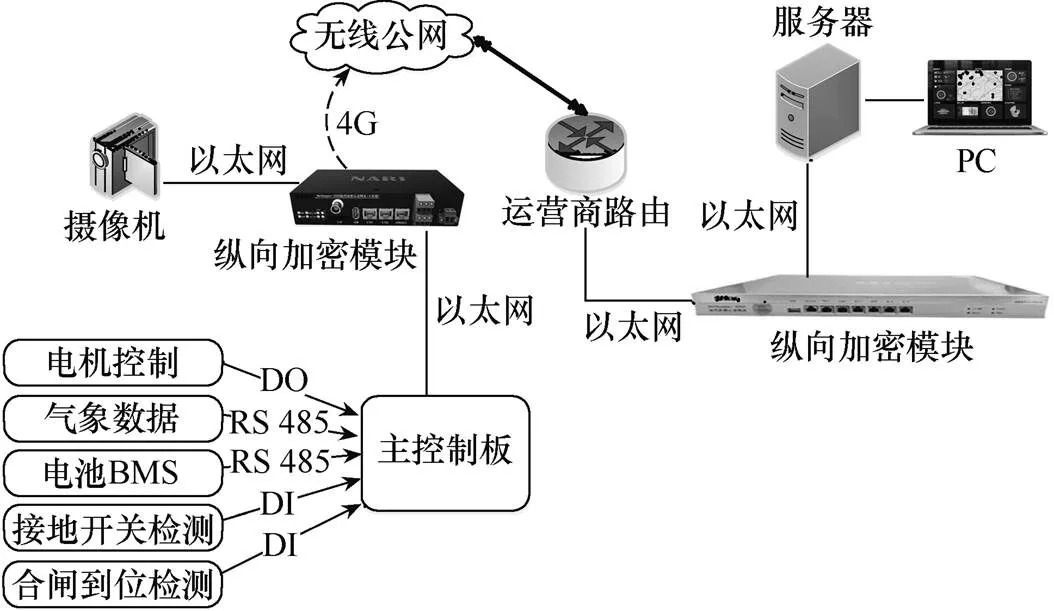
图2 远控系统网络拓扑图
该远程控制系统的操作流程如下:系统操作人员得到融冰指令,从控制主机遥控融冰接地开关分闸,确认开关到位后,合地线融冰自动接线装置,现场配备的状态采集设备得到合闸信号后,传送到控制主机。操作人员再通知变电站起动融冰电源,地线开始融冰。待结束后,融冰电源退出,再遥控地线融冰自动接线装置分闸,合上接地开关,系统操作结束。
2 原有的就地执行合闸操作的方式
在上述的融冰操作过程中,装置是否完成合闸动作直接决定了线路能否接通融冰电流,是融冰操作至关重要的一步。
在现有的就地操作方式中,已经设计了合闸到位时的电机保护和对合闸位置的判断方式。
由于合流线夹是安装在跳线上,而不同的铁塔跳线的弧垂高度各不相同,所需装置的导电杆长度也不相同,再加上起固定和支撑合流线夹作用的跳线串往往因不同铁塔横担结构的原因,需避开干涉与竖直方向呈一定角度安装,这个角度由各个铁塔横担结构决定,基本上各不相同。由此造成合流线夹与装置导电杆的相对位置往往也各不相同,不同铁塔安装的导电杆和动触头在合闸时的位移不是固定值,因此不宜采用角度或位移传感器等方式进行位置确认。而触头和触指的接触力是固定的,即合闸力的大小和传动机构的扭矩是相对确定的,因此现阶段采用了扭矩限制器控制合闸到位。合闸时,当扭矩超过扭矩限制器的设定值时,扭矩限制器起动对电机的过载保护,激发限位开关发出信号,就地操作的电气控制箱接收到信号之后,切断电源,电机停止转动。
在以往的现场操作中,扭矩限制器和限位开关结合的方式基本上能完成合闸到位信号的传输和控制电机自动停转,但是也偶尔出现限位开关失灵导致的电机未自动停止的情况。就地操作时,现场的工作人员可以在塔下即时观测到导电杆的位置状态,如在合闸到位后电机还在旋转,可以立即按下就地控制箱(如图3所示)的急停按钮,切断电源使其停止。

图3 就地控制箱
3 远控操作合闸过程可能出现的故障分析
地线融冰自动接线装置在远方主机进行控制操作时,由于装置所处的铁塔处已经没有工作人员在现场进行观察,极有可能发生未能察觉的合闸故障。
一是动静触头合闸不到位。原因可能是安装在跳线上的合流线夹由于大风等原因导致位置偏移过大,或者是导电杆上的动触头有覆冰,致使不能与静触头有效接触,如图4所示。此情况使导电杆上的动触头受力于跳线、保护罩或者静触头前端,在扭矩到达设定值时,同样会激发限位开关发出合闸信号,使电机停止转动。但此时的合闸信号是假信号,一旦通融冰的大电流会造成融冰不成功或者装置、跳线局部发热过高而损毁等事故。
二是合闸操作无法自动停止。原因可能是扭矩限制器或者限位开关故障。限位开关发生故障时,在扭矩限制器达到限定值产生分离后,导电杆停止转动,但限位开关无法发出信号切断电源,此时电机会一直转动。而扭矩限制器若发生故障,在达到限定值之后不分离,导电杆会一直向前旋转,使装置和跳线发生机械破坏。
如出现上述合闸故障不能及时停止,轻则影响地线的融冰操作,重则破坏输电线路,造成大面积、长时间的停电事故。

图4 动触头碰触屏蔽罩导致的合闸不到位
因此,为提高合闸的成功率,避免破坏装置和导线,必须解决两个问题:①使用合理有效的手段使电机及时停止转动;②让远方的操作人员及时了解当前操作过程中的状态。
4 远方执行合闸操作的方案
4.1 兼容远方/就地两种操作方式
为了提高地线融冰自动接线装置操作的可靠性,在装置新增远方操作方式的同时,需保留原有的就地操作方式,以备在传输通道、网关设备等原因造成远方操作失效时,可以由人工携带便携式就地操作箱,到铁塔下进行地线融冰自动接线装置的操作。所以,考虑到不同操作方式的兼容性,装置的远控合闸仍采用扭矩限制器结合限位开关来实现到位信号的触发和电机的停止转动。
4.2 安装户外摄像机进行辅助判断
根据已分析的远控时易发生的两种合闸故障,动静触头合闸不到位时的危害相对较小,因其电机可以停止转动,仅需新增非同源采集设备确认限位开关发出的合闸信号的正确性,保证不在合闸未到位时通电,再由工作人员进行排障处理即可。对于新增的另一种形式的采集设备,应尽量避免高电压、强磁场的影响,与合流线夹拉开距离,因此使用图像传感设备,即户外摄像机进行辅助合闸判断最为合理。
4.3 编制程序进行电机停转和故障定位
合闸操作无法停止的故障,其危害较大。不管是扭矩限制器还是限位开关故障,都有一个共同特点,即导电杆到位以后,电机仍然在继续转动。只要采取手段使电机及时停转,就能有效解决这个 问题。
电机的停转可以通过对电源的管理来实现,但首先需要确定满足切断电源的前提条件。
假设系统从电机开始运转即启动计时,到电机停转终止计时,将产生的这个时间参数定义为装置的合闸时间。在同一套装置的不同次操作中,正常的合闸时间应该在一个较小范围的区间内。如果某次合闸时间已经超出这个区间且仍在增长,即认为本次操作已经满足主控板切断电机电源的前提条件,此时应立即执行切断电源操作,电机停转。
上述步骤虽完成了电机的停转,避免了更严重事故的发生,但是为了尽快处理故障,完成融冰工作,本系统需在设备故障时实现对故障点的初步判断。经过实测可知,电机在扭矩较大时,其电流处于过载状态,数值往往是额定电流的数倍,可将此作为判断故障点的依据。如果是由于限位开关引起的故障,动静触头在合闸过程中,位置状态依次从未接触、接触到合闸到位,电流的数值变化依次为额定电流、过载电流和额定电流;如果是由于扭矩限制器引起的故障,合闸过程中,由于电机在导电杆上的动触头接触物体后仍然施加较大扭矩,电流的数值会一直停留在过载电流直至被切断。
根据上文描述的电机电源控制和故障定位的运行逻辑,编制合闸控制程序,写入主控板,可以实现在合闸故障发生时自动停转电机和在远方主机实时显示设备故障报警的功能。
4.4 远方执行合闸操作的方案综述
综上所述,设计远方执行合闸操作的方案是,仍然用扭矩限制器和限位开关实现电机停转和信号发送;使用视频摄像机进行合闸位置的辅助判断;在设备故障时由主控制板上的合闸程序执行切断电机电源操作,并向远方主机实时推送报警信息。此策略具体操作流程如图5所示。
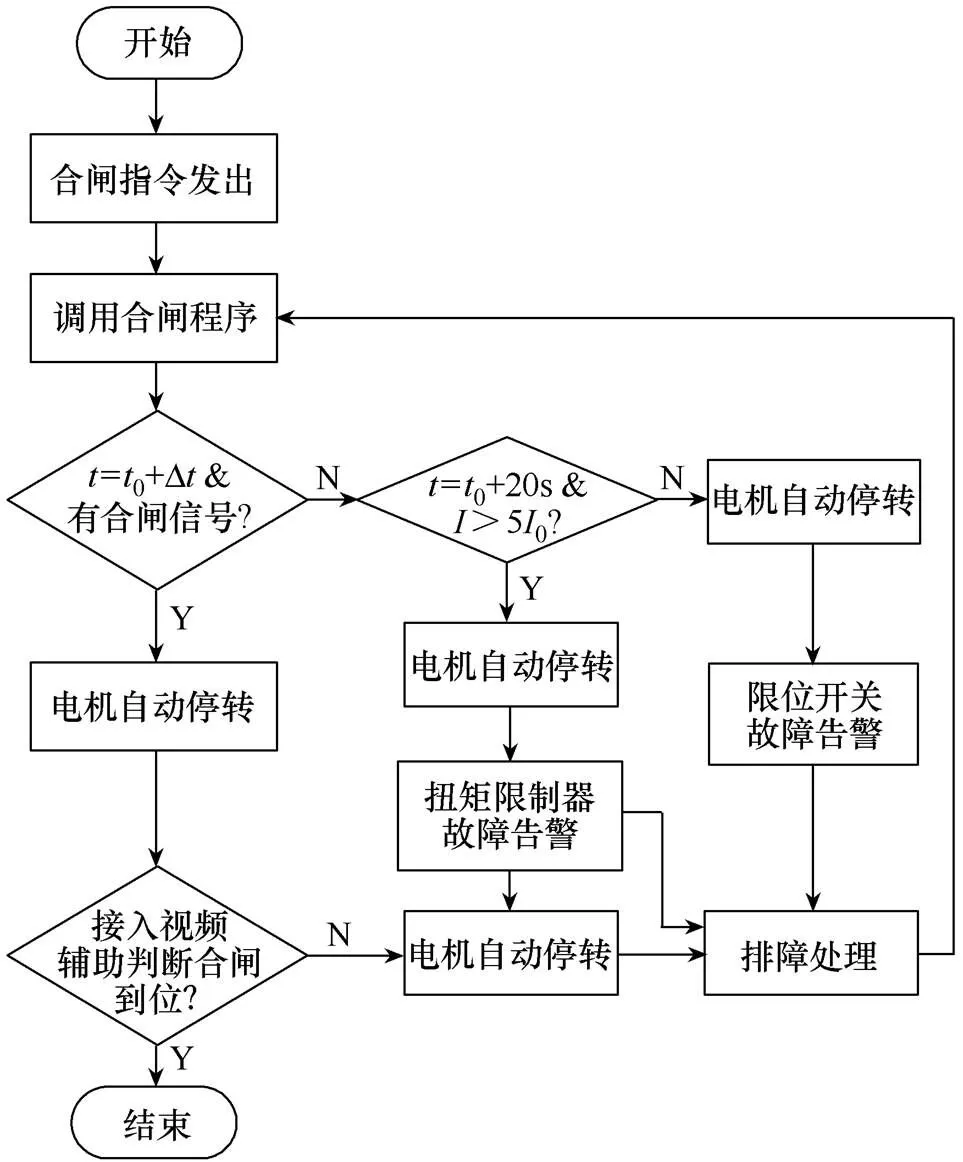
图5 远程控制合闸操作的流程图
在控制主机发出合闸指令后,系统自动调用合闸程序,电机开始转动,记录电机运转的时间。假设正常的合闸时间为0,误差为Δ。当合闸到位时间在预设的0Δ范围内,主控制板接收到合闸到位信号后自动触发电机停转,此时接入摄像机的视频图像,由工作人员进行辨认,确认合闸到位后,装置操作结束,通知融冰电源通电。如判断装置未能有效合闸,工作人员发出合闸未到位告警,避免融冰电源通电,同时派出排障人员进行排障处理。当在预设的合闸到位时间内电机未能停转,合闸程序启动保护措施,并进行故障分析和告警,具体的程序设定和执行过程为:电机运转时,主控制板记录电机的运行电流,假设电机额定电流为0,根据实际操作经验,设置过载电流为50,电机在运行到正常合闸时间0之后20s的时刻,由主控制板切断电机电源。如在切断之前,检测到的电机运行电流是过载电流(>50),可自动判断为扭矩限制器故障并向控制主机进行告警;如在电源切断之前,电机的运行电流是额定电流,可自动判断为限位开关故障并向控制主机进行告警。排障人员根据告警提示的信息安排检修工作,可尽快完成故障元件的修复。
5 合闸影像采集摄像机的选取和安装
上述策略的实施需在铁塔上新装合闸影像采集摄像机。预装的摄像机在选型上需要考虑户外运行时的各种不利因素:①针对不同角度太阳光照的情况,所选的摄像机需可在逆光环境下拍摄;②针对可能在夜间或光线不足的情况下工作,摄像机需具备高效红外照射功能;③针对大雾天气,需具备透雾功能;④针对冬季室外的低温天气,需支持低温起动。另外其本身要满足IP65以上的防护等级,以及要具备抗高电压、抗高电磁干扰的能力,必要时按照国家标准和电力行业标准进行EMC测试。

图6 户外摄像机专用防护罩
摄像机设计专用室外防护罩进行保护(如图6所示),该防护罩有整体温控功能,可在被冰雪包敷情况下加热融化冰雪,同时还配置雨刷,可定期清除防护玻璃上的灰尘。
对于摄像机的安装位置,经过实测,选择在铁塔上正对合流线夹的位置向左或者向右偏移10°左右安装,可完美避开导电杆对视线的阻挡,动静触头接触状态显示效果最佳,如图7所示。

图7 测试时摄像机偏移10°的显示效果
本项目暂定在试运行时选择一条线路上的两台地线融冰自动接线装置进行远程控制改造,因此在控制主机端由人工分辨合闸图像完全可以实现对原有合闸信号的有效补充。但是若一条线路上的几十甚至上百台装置都经过改造后,远控系统接入更多的视频图像信息,工作人员如仍然用人工的方式进行图像判别,会极易忽略掉关键的信息。
在现有的输电线路在线监测系统中,也存在同样的问题。未经处理的各种图像信息大量汇集到运检人员面前,导致人工方式很难从海量的图片中获取有效信息,使监测平台使用效率非常低下。电网部门经过大量研究后发现,解决此类问题最有效的方法是使用图像识别技术进行目标分类、检测、识别和跟踪,完成智能诊断和智能预警[11]。因此,同样是通过采集图像信息进行识别,本远程控制系统非常适合采用基于深度学习的图像识别技术来判断合闸是否到位。
可在试运行后采集海量的地线融冰自动接线装置合闸视频图像信息,使用大规模深层次卷积神经网络模型自动学习合闸图像特征,并泛化到实际场景识别过程中,实现合闸状态的自动识别。
6 结论
输电线路地线融冰自动接线装置的远程控制改造,可实现融冰现场无人值守,大幅提高地线融冰的工作效率,减少操作人员的工作量,保障了融冰工作人员的安全。而对该装置远程控制的改造,最重要的一步是完成装置的合闸并及时得知合闸信息。本文从以下几点对装置合闸操作的远控改造方案进行论述:
1)为实现就地操作和远控操作的兼容性,装置的远控合闸仍采用扭矩限制器结合限位开关来实现合闸到位信号的触发。
2)通过在主控制板写入合闸操作程序,可保障装置在元器件发生故障时,能及时停止电机,并完成故障的定位报警,指导排障工作。
3)通过新装合闸影像采集装置,辅助判断合闸状态,可有效解决单一方式反馈信号易发生误报的问题,确保了融冰过程的安全性。
本文所述方案还需经过大量实验和工程应用的验证,根据实际使用的情况来指导完成地线融冰自动接线装置的远控改造。
[1] 王少华. 输电线路典型覆冰事故及防治技术分析[J]. 高压电器, 2010, 46(10): 85-89.
[2] 吕锡锋. 高压输电线路覆冰状态监测与除冰技术研究[D]. 保定: 华北电力大学, 2015.
[3] 陈佩瑶. 输电线路高频激励融冰技术及装置研究[D]. 长沙: 长沙理工大学, 2012.
[4] 饶宏, 李立浧, 黎小林, 等. 南方电网直流融冰技术研究[J]. 南方电网技术, 2008, 2(2): 7-12, 36.
[5] 方伊莉, 顾莉, 李其, 等. 地线融冰自动接线装置设计与分析[J]. 机电信息, 2016(27): 98-99.
[6] 王高益. 输电线路导线温度在线监测系统设计[D]. 保定: 华北电力大学, 2013.
[7] 尹晖, 张晓鸣, 李小祥, 等. 基于视频监测的输电线路舞动信息提取与频谱分析[J]. 高电压技术, 2017, 43(9): 2889-2895.
[8] 黄新波, 魏旭, 李敏, 等. 基于3组力传感器和倾角传感器的输电线路导线覆冰在线监测技术[J]. 高电压技术, 2014, 40(2): 374-380.
[9] 高明, 赵振刚, 李英娜, 等. 基于光纤传感的输电线路杆塔倾斜监测研究[J]. 电子测量与仪器学报, 2018, 32(12): 51-59.
[10] 黄山, 吴振升, 任志刚, 等. 电力智能巡检机器人研究综述[J]. 电测与仪表, 2020, 57(2): 26-38.
[11] 王艳如, 刘海峰, 李琳, 等. 基于边缘智能分析的图像识别技术在输电线路在线监测中的应用[J]. 电力信息与通信技术, 2019, 17(7): 35-40.
Research on remote control transformation scheme for closing operation of ground wire ice-melting automatic wiring device
XUWangsheng1CAO Weiwei2TAN Jin1LU Guilai2YAN Yan1
(1. China Southern Power Grid EHV Transmission Company Guiyang Bureau, Guiyang 550081;2. Nanjing Power Fitting Design & Research Institute Co., Ltd, Nanjing 211500)
In order to realize the long-distance ice-melting of overhead transmission lines, it is necessary to reform the automatic ice-melting wiring device. First of this paper, the whole scheme of the device modification and the operation flow of the remote control system are introduced, and the importance of the closing operation in the whole ice melting operation is clarified. Secondly, by comparing the existing on-the-spot closing operation mode, the paper analyzes the possible faults and causes of the remote closing operation. Finally, some measures are put forward to avoid the accident, such as keeping the existing control mode to control the motor's stop-turn and trigger the closing signal, increasing the closing time-power on-off management and monitoring the motor's running current, an image acquisition device is added to the tower to help identify the closing status information, so as to improve the success rate of judging the closing position from afar.
earth wire ice melting; remote control modification; closing signal; motor running time; overload current; locate and alarm
中国南方电网有限责任公司超高压输电公司科技项目(CGYKJXM20190267)
2020-07-13
2020-07-27
徐望圣(1982—),男,湖南省益阳市人,高级工程师,主要研究方向为输电线路运行维护。
