基于ADAMS的某链式机枪自动机动力学仿真研究
2021-02-25满孝杰郝秀平
满孝杰,郝秀平,焦 健
(1.中北大学机电工程学院,山西 太原 030051) (2.国营第八六一厂,湖南 长沙 410100)
链式武器一般装载在空中战机、海上军舰、陆地步兵战车等快速运动且平台抖动强烈的载体上,而小口径链式机枪由于威力小,还可以装载在无人作战平台上。想要在这些载体平台上发挥出链式武器的作用,链式武器的射击精度以及可靠性就显得极为重要。本文通过模拟机框的运动情况来分析某链式机枪的可靠性。
1 链式机枪自动机的工作原理
链式机枪是一种由外能源提供动力的自动武器,如图1所示,其自动循环动作是由电机驱动链条传动系统来完成的[1]。现有链式武器的链条传动系统一般由4个链轮将1根封闭的链条张成矩形,4个链轮中有1个主动链轮和3个从动链轮,其中主动链轮的驱动力是由外部电机通过输出轴提供的。
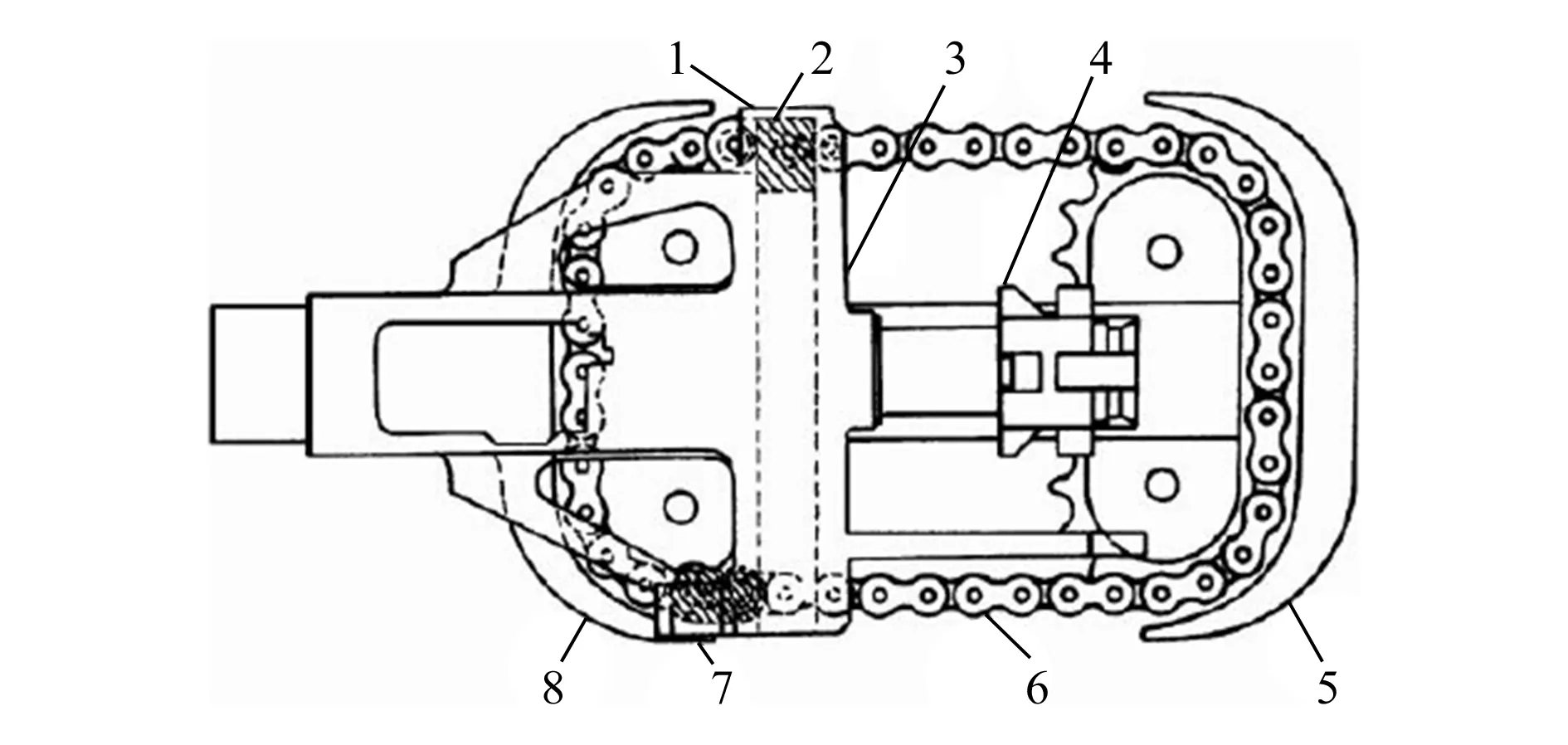
1—机心座滑块;2—主链节;3—机心座;4—机头;5—前引导板;
链式自动机的工作原理是通过带有滑块的链在链轮围成的矩形路线上周向转动,从而带动机心座的前后运动。当机心座滑块在前一长边上运动时,机心座做纵向运动,枪机便完成推弹入膛、闭锁击发、抛壳等动作。当机心座滑块在另一长边上运动时,机心座后移,枪机完成抽壳动作,从而实现了枪机的后坐与复进[2]。
当机心座滑块在短边运动时,其在机心座的T型槽内滑动,机心座不动。当机心座停留在后方时,供弹机构完成输弹、供弹动作;当机心座停留在前方时,枪机进行闭锁、击发动作,进而完成链式机枪自动机的自动循环动作[3]。
2 某尺寸链式机枪自动机三维模型
2.1 自动机模型的构成
自动机组件由链传动系统、枪机框、机头组件、链条上板及链条下板等组成。链传动系统包括主动链轮、链轮、滑块座、滑块和链条等5个部件[4]。
2.2 自动机模型的工作原理
链轮通过轴承与链条上下板连接,链条下板和机匣固连,链条上板通过螺栓与链条下板固连,链条上板通过导轨限制枪机框前后运动。枪机框后部安装有滚轮,滚轮在供弹机构摆杆槽内运动并带动拨弹齿完成供输弹动作,自动机组件主要完成推弹入膛、闭锁、击发、开锁、抽壳、后坐与复进等动作[5]。自动机组件如图2所示。
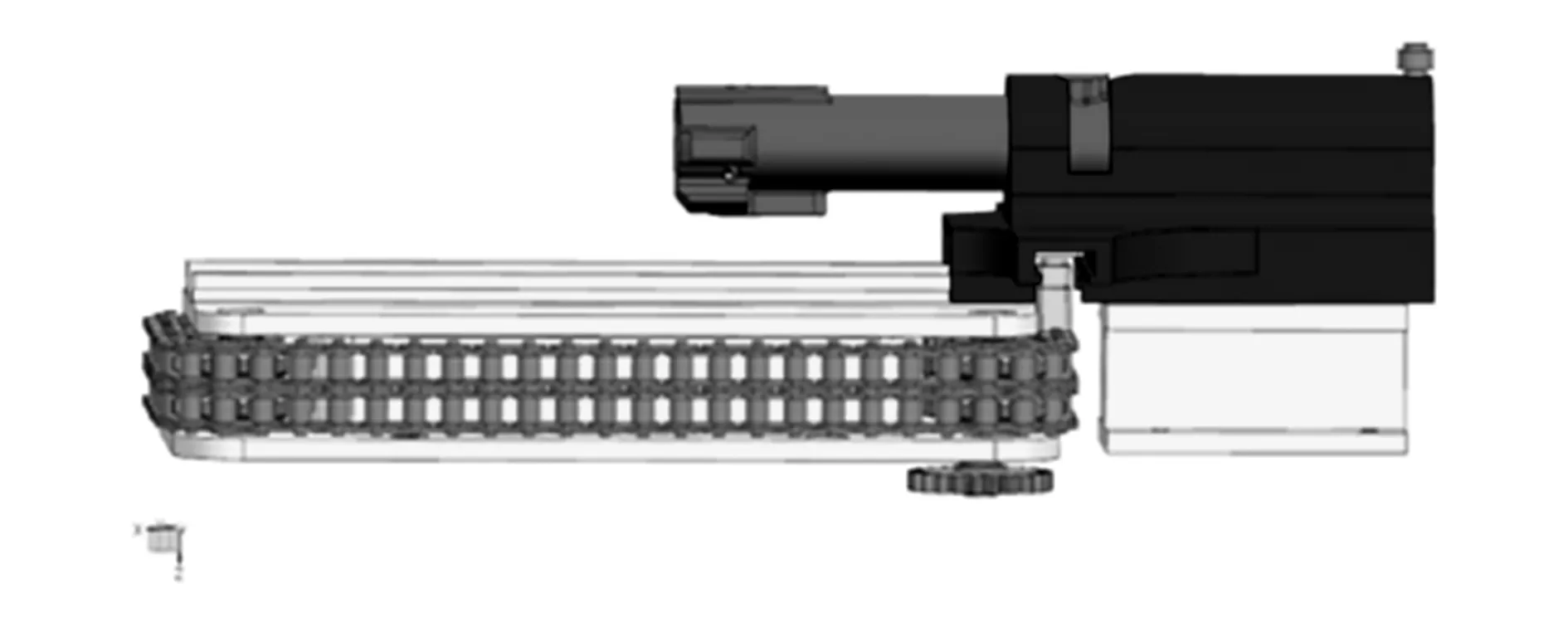
图2 自动机组件
3 建立仿真模型
3.1 虚拟样机模型的简化
1)除链条、弹链考虑其变形影响外,其他部件看成刚性体;
2)如一些销钉等连接方式简化成运动副;
3)由于开锁膛压小,因此不考虑火药气体对部件机构动作的影响;
4)用固定副固连大地,不考虑枪架振动影响;
5)忽略一些不参与仿真运动的零部件。
3.2 链式自动机运动方程及特性分析
将链传动系统进行简化,原理简图如图3所示,图中直角坐标系的X轴对应着链式自动机的进弹、抽壳运动行程,Y轴对应着闭锁、击发、开锁行程。后窄边中心设置为原点,链轮纵向中心距用长边a表示,链轮横向中心距用短边b表示,4段过渡圆弧代表的是链轮的分度圆半径。其中点1~9分别为过渡圆弧的交点,并且依据顺时针排列。
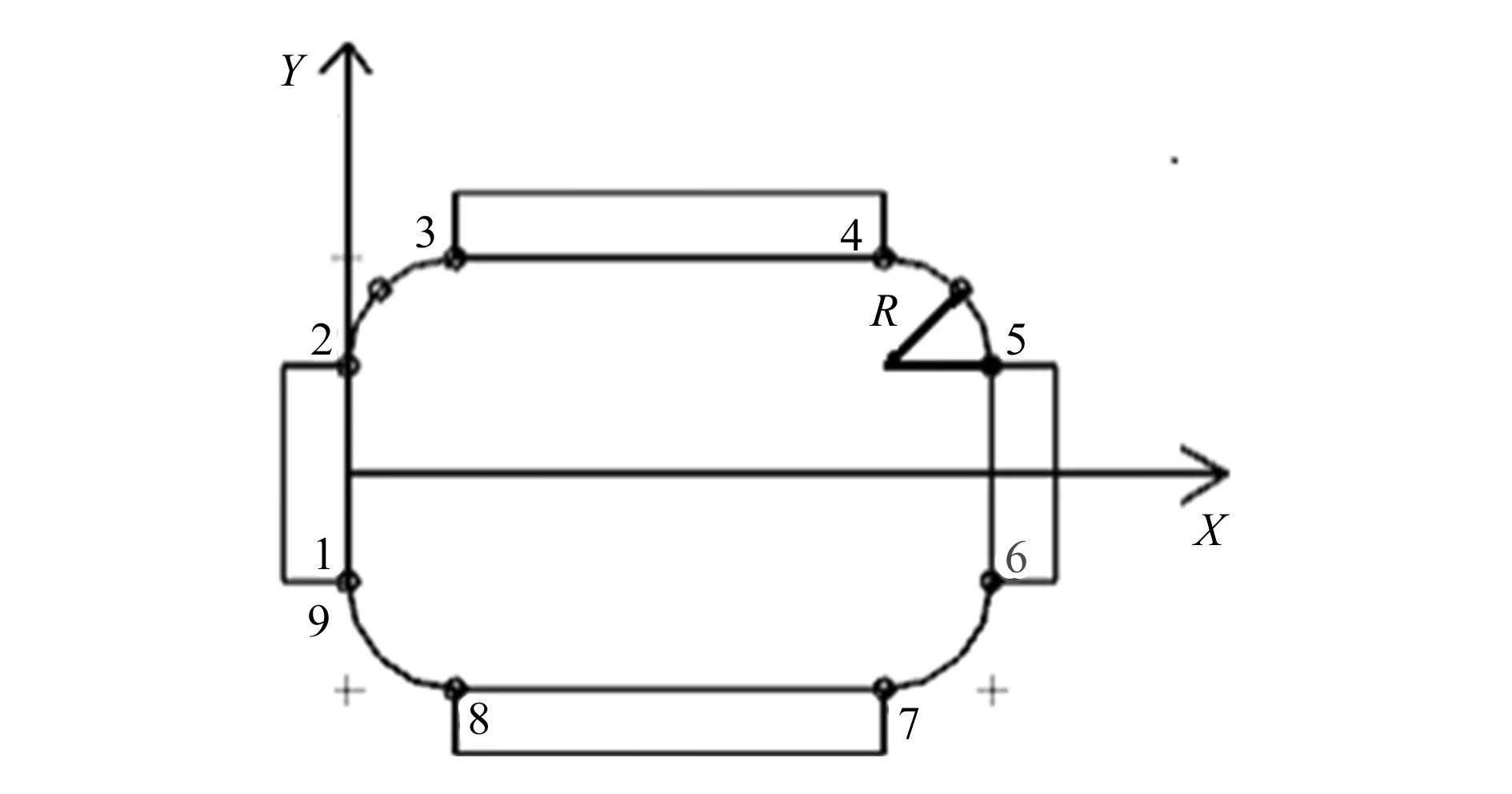
图3 链传动系统原理简图
根据表1可以看出,链式机枪自动机的运动过程分为8个阶段。表中,第一列为运动阶段;第二列为链条沿X轴方向随时间的位移;第三列为第二列表达式的一阶导数,表示的含义为链条沿X轴方向的速度;最后一列为第二列表达式的二阶导数,表示的含义为链条沿X轴方向的加速度。通过表1可得理想状态下自动机的位移、速度、加速度随时间变化的规律如图4所示。
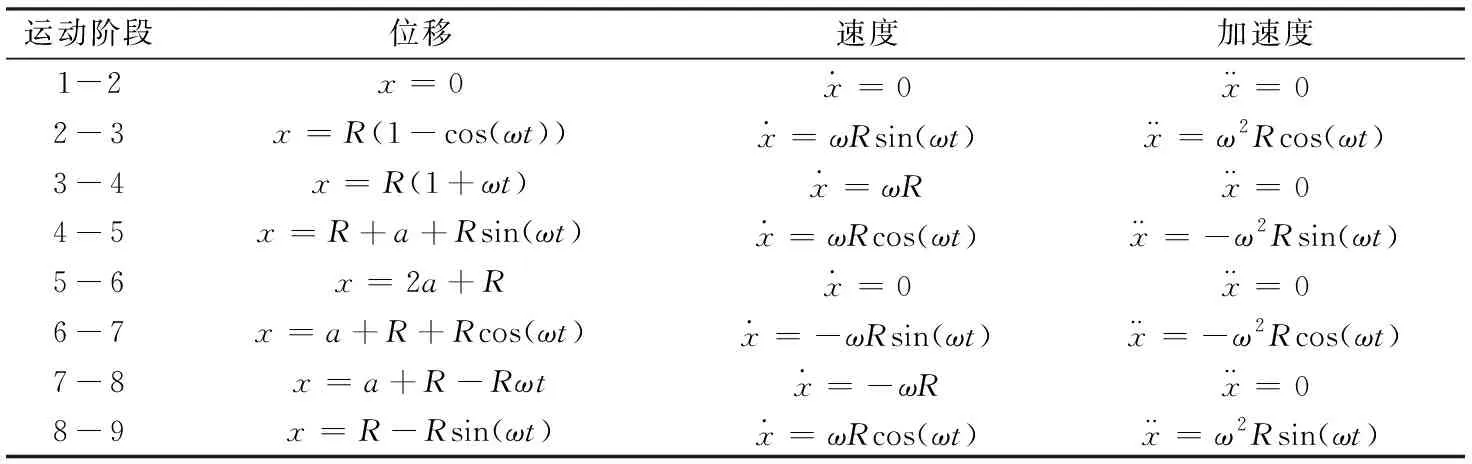
表1 链式自动机随时间运动特性函数
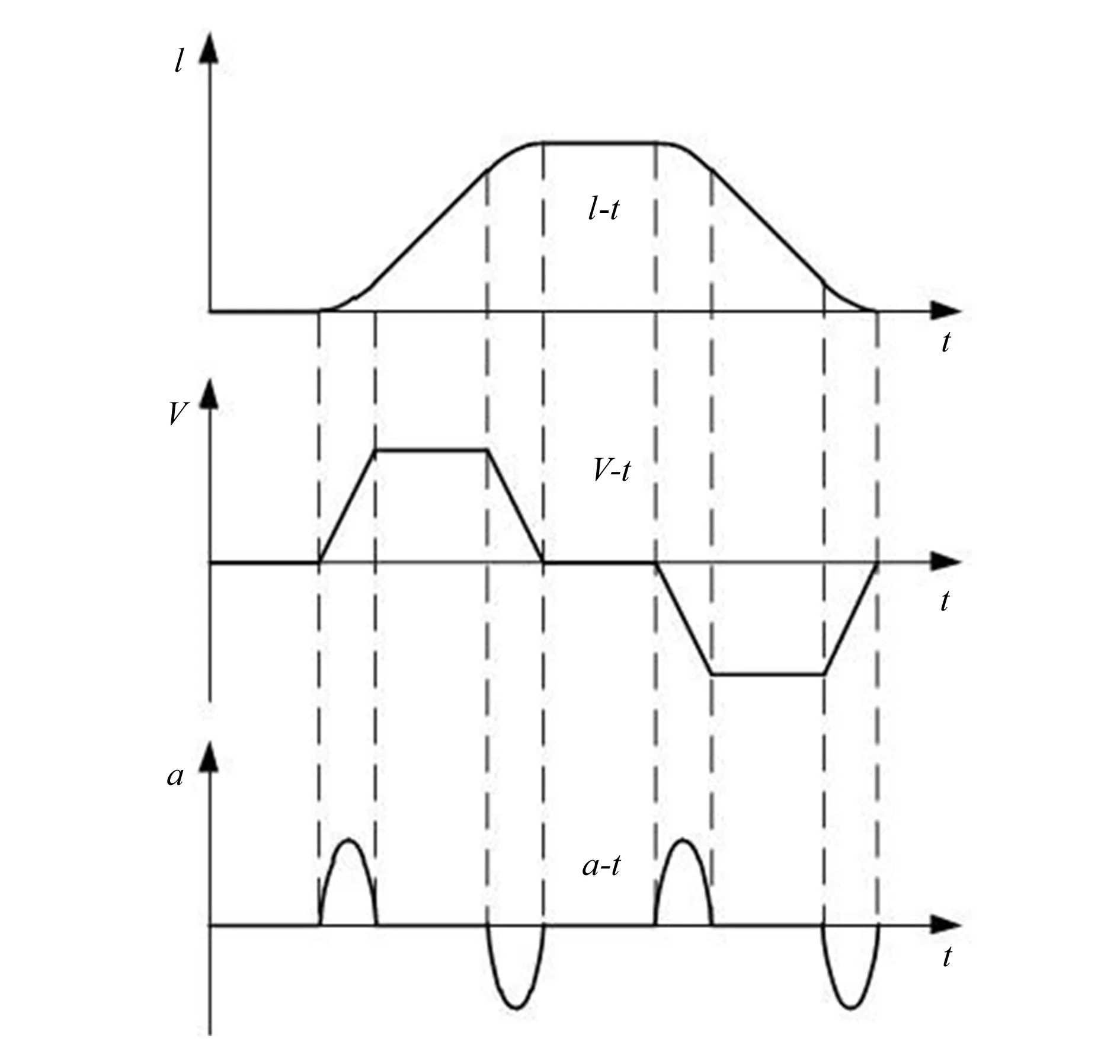
图4 理想状态下链式自动机运动特性曲线
从图4可以看出,链式机枪自动机的位移运动规律近似可以看成梯形变化规律,速度运动规律为标准的梯形变化规律,加速度变化规律属于标准的正弦变化规律。链式自动机仿真曲线只有和理想状态下自动机运动特性曲线相符才能保证其可靠工作。
3.3 模型的建立
将在UG中建立的三维模型导入ADAMS中,由于导入ADAMS中的模型仅有几何形状特征,所以在仿真分析前需要对各部件的名称、材料属性等相关参数进行设置。由于链条链轮是在ADAMS中生成的,所以用单排链代替双排链,如图5所示。设置完成后在ADAMS中根据各机构之间的关系添加运动副,其约束见表2。
3.4 虚拟样机载荷的添加
在链式机枪虚拟样机模型中,需要施加的载荷有膛底压力、抽壳力、摩擦阻力[6]。建立内弹道及后效期火药气体压力计算的数学模型,通过MATLAB进行编程,并求解得到该弹内弹道的膛底压力-时间曲线,如图6所示[7]。
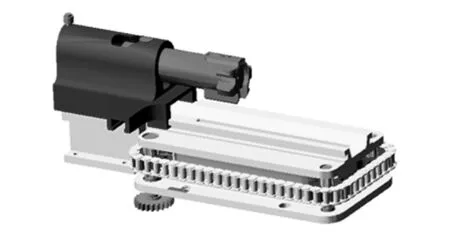
图5 虚拟仿真模型
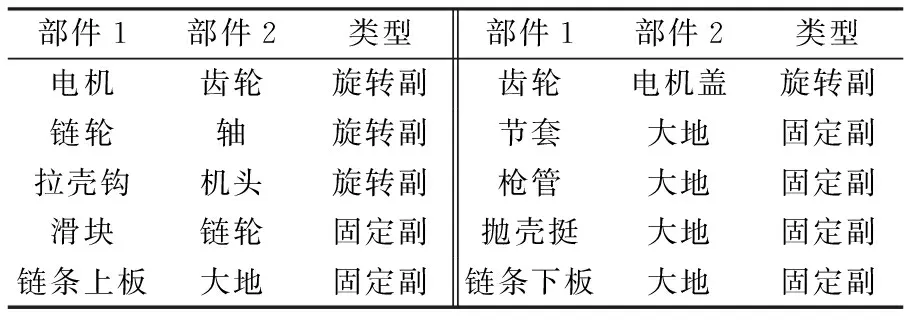
表2 各部件之间的约束
图6 膛底压力-时间曲线
已知链式机枪内弹道膛底压力-时间曲线后,再根据转化公式计算膛底合力。
转化公式:
(1)
式中:Fh为膛底合力;S为枪膛横截面积;ω为装药量;m为弹丸质量;φ1为次要功系数;p为膛压。
根据式(1)计算得到膛底合力曲线,如图7所示。
图7 膛底合力-时间曲线
4 链式机枪仿真结果与分析
在运行仿真模型前,需要进行相关参数的设置,首先需要将联合仿真模型的输入转速值设置为10 667 r/min,此转速是链式机枪在射频为600发/min的理论转速;其次将联合仿真的时间设置为0.1 s。仿真完成后得到链式机枪枪机框位移随着时间的变化规律,如图8所示。
图8 链式机枪枪机框位移随时间变化曲线
当链式机枪的射频为600发/min时,枪机框的理论循环周期为0.1 s。从图8中可以看出,枪机框的循环周期为0.1 s时,链式机枪的实际射频为588发/min。由此得出:枪机框位移图在链条前后直线段产生波动现象,究其原因是链条在前后直线段运动时前后晃动导致枪机框的位移波动。从图中还可以看出,枪机框位移的最大值约为-29 mm,最小值约为-149 mm,其差值为120 mm,与链式机枪自动机设计的工作循环行程基本一致,说明在射频不同的情况下链式机枪能够稳定地进行射击,验证了其在不同射频状态下运动的稳定性。
在射频为600发/min,自动循环周期为0.1 s的前提下,仿真得到的枪机框速度、加速度随时间变化的曲线如图9、图10所示。
图9 链式机枪枪机框速度随时间变化曲线
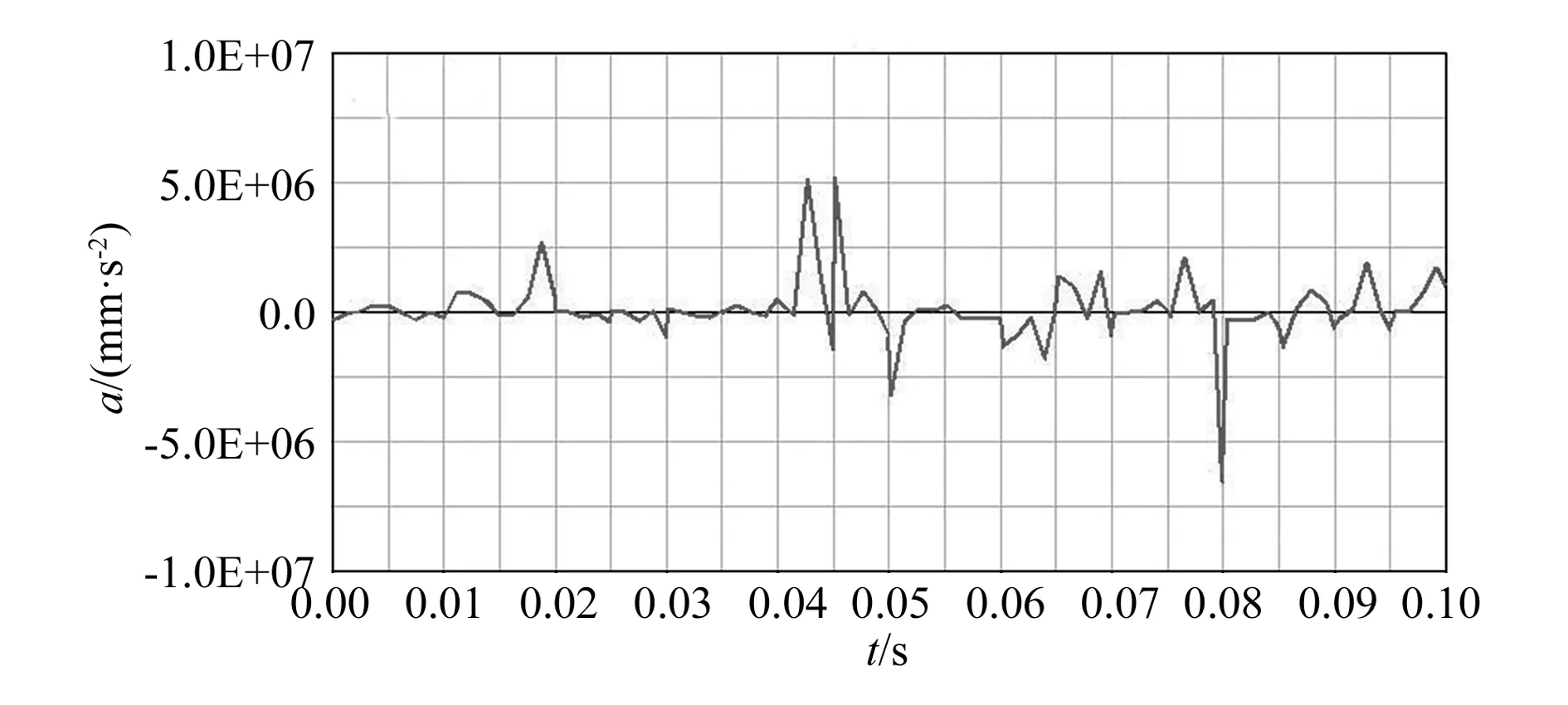
图10 链式机枪枪机框加速度随时间变化曲线
从图9中可以看出,枪机框的最大瞬时速度为3.7 m/s,平均速度约为3.3 m/s,图形近似为T型,与理论分析结果一致,即仿真结果满足实际设计要求。从图10中可以看出,枪机框的最大加速度约为10 000 m/s2,其加速度与理想的加速度曲线变化差别较大,主要原因是在仿真过程中存在大量的波动,而理想状态下忽略了链条的抖动及各部件之间的接触。
射频为500发/min情况下,链式机枪枪机框的位移、速度、加速度随时间变化的运动特性曲线如图11所示。
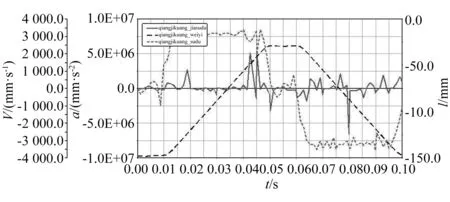
图11 500发/min射频下链式机枪枪机框位移、速度、加速度随时间变化曲线
链式机枪的射频为500发/min时,枪机框的理论循环周期为0.11 s,从图11中可知,枪机框的循环周期为0.11 s,链式机枪的实际射频为503发/min。链条的运行距离不变,则枪机框的位移大小不发生变化,同样为120 mm。相对于射频600发/min,500发/min射频时的速度较低,约为2.6 m/s,同时在链条前后直线段速度曲线波动也相对较小,主要是降低射频使链轮转数降低,链条的抖动也随之减小。在500发/min射频和600发/min射频条件下,枪机框的运动特性曲线规律基本一致,这说明链式机枪在任选的不同射频条件下依然能稳定运行。以上结果充分证明了链式机枪具有优秀的可靠性。
5 结束语
本文首先对某口径链式机枪自动机进行了理论分析,然后用多体动力学软件ADAMS进行了仿真分析,并对自动机枪机框部分的运动曲线进行了分析总结,最后得到结论:链式机枪在不同射频条件下都能够进行稳定的运行,其位移、速度、加速度与理论分析的自动机特性曲线基本一致,由此可知链式机枪具有一定的可靠性[8]。