基于共形几何代数的空间机构位置解方法研究
2021-02-25亢书华李瑞琴
亢书华,李瑞琴
(中北大学机械工程学院,山西 太原 030051)
串联机构和并联机构统称为空间机构。串联机构因具有运动空间范围广、灵活性高等优势广泛应用于工业机器人、医疗康复机器人等领域。并联机构相对于串联机构具有刚度大、精度高、结构稳定、承载能力强等特点,长期以来都是机构学领域的研究热点。
位置分析作为机构运动分析的基础,包括位置逆解和位置正解。位置逆解指已知输出参数求输入参数;位置正解指已知输入参数求输出参数。分析方法通常分为数值法和解析法两种。解析法能够得到全部解且解析表达式对机构动力学性能分析有很大用处,缺点是不易获得解析表达式,没有通用性。Li等[1]采用解析法求得3-RSR并联机构相对于静平台的位姿关系矩阵。Gong等[2]通过解析式求得7-DOF冗余度机械手的逆解。Lu等[3]采用解析法对平面三连杆6-DOF进行分析,得到了该机构的逆解与正解。数值法的优点是可以快速求解,但是一般得不到全部解。张启升等[4]采用数值法求得3-PSS-6R并联机构每条支链的运动学逆解。Zhu等[5]引入简化的牛顿迭代法,以Stewart平台为例,结合人工神经网络得到平台运动的正解。无论是解析法还是数值法,在求解机构运动学性能的过程中都不能表达机构运动与机构参数之间的几何关系[6]。
共形几何代数(conformal geometric algebra,CGA)作为几何代数的重要分支之一,由于具有计算过程简单、清晰且不与坐标选取相关等优点,被广泛应用于物理学、计算机图形学、计算机视觉等基础和技术领域[7]。近几年,CGA已被应用于空间机构位置解的求解过程中。CGA将机构的几何结构与运动联系起来,具有较强的几何直观性且能够简化位置解计算过程。因此本文着重探讨CGA在求解刚柔耦合并联机构和冗余驱动并联机构位置解的应用潜力。
1 CGA的计算原理
1.1 CGA的基本计算
五维空间R3+1,1是由一个三维欧氏向量空间R3与一个二维的闵氏空间R1,1延伸而来。CGA包括5个正交基{e1,e2.e3,e+,e-},且该组正交基满足:
ei·e+=ei·e-=e+·e-=0
在共形几何空间中,引入两个null基{e0,e∞}表示原点和无穷远点,且
e∞=e++e-
物体的运动通过几何积表示为:
uv=u·v+u∧v
式中:uv为几何积;u·v为内积,用来计算距离和角度;u∧v为外积,用来构建几何实体。
在共形几何空间中,对于一个矢量A,其逆A-1的定义为:
AA-1=1
矢量A的对偶A*表示为:
A*=A·I-1
式中:I-1=e1e2e3e0e∞,为单位伪标量的逆。
1.2 空间几何元素的表达原理
在共形几何空间中,通过几何实体的相交可以得到不同的元素表达式,见表1[7]。
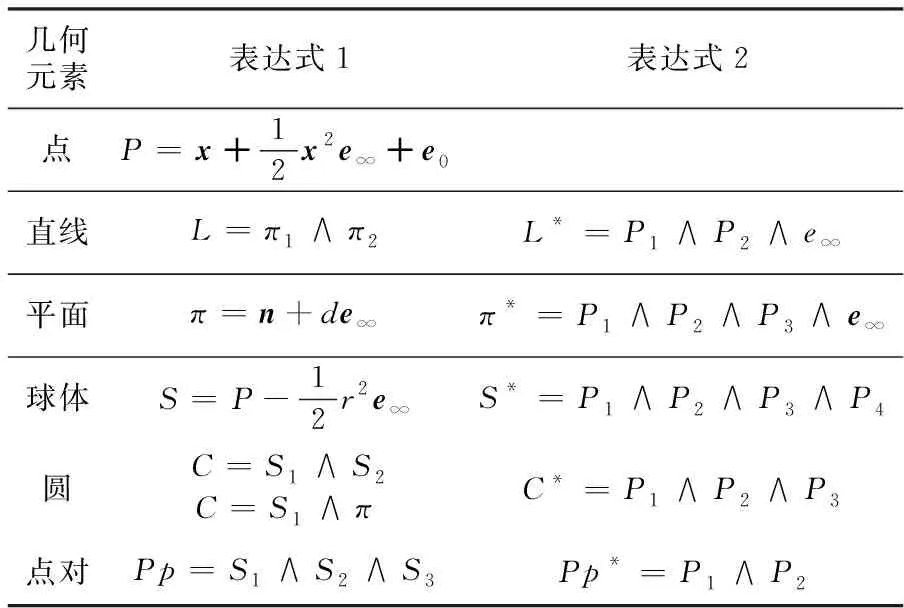
表1 几何元素的表达式
刚体的运动主要表现为平移和旋转。在共形几何空间中,平移算子T表示为:
式中:t为平移的方向和距离,t=t1e1+t2e2+t3e3,其中t1,t2,t3为标量系数,e1,e2,e3为三维空间中的向量。
旋转算子R表示为:
式中:θ为旋转角;L为旋转平面的单位二向量。
刚体的马达算子M表示为:
M=RT
刚体的运动被表达为:


2 基于CGA的空间机构的位置逆解方法研究
机构分析可为机构设计提供数据支持。相对来说,串联机器人的位置逆解比正解难获得。对于串联机器人的正解,采用传统的D-H矩阵法只需要将各关节的矩阵相乘便可获得;反而是逆解不易获得,但是逆解是控制程序和轨迹规划的基础。对于传统方法,需要考虑到非线性和耦合等因素,求解效率不高且容易产生漏根或者增根。因此串联机器人逆解的求解一直是机构学的难点,比如20世纪的“珠穆朗玛峰”问题,即串联7R机构的位移分析[8]。将CGA应用于串联机器人的逆解问题中,从几何角度去分析机构,避免了多元高次的求解问题,可以快速获得位置逆解,不少学者利用该方法得到了串联机器人的位置逆解[9-14]。
在这种算法基础上,Campos-Macías等[15]针对6-DOF仿人机器人通过CGA的外积得到身体和末端所需要的位置和方向,以此重新分配每个关节的旋转量,该方法还可以用到后续的避障和自碰撞算法中。Bayro-Corrochano等[14]基于视觉辅助通过操纵5-DOF机械臂实现对物体的各种操作,他们通过CGA引入的一种二维几何雅可比矩阵作为标准雅可比矩阵,该雅可比矩阵可以应用于任何类型的机器人关节。此外,结合CGA在其他领域的应用可以完成更多的任务。Zamora等[16]在运动学的基础上结合机器视觉,解决了视觉引导的抓取问题。Pitt等[17]提出基于CGA求解位置逆解的算法,结合代码生成软件得到可执行的C代码,实现了更高效的求解。
当然,对于并联机构也有相关的研究,并在冗余并联机构的位置解求解方面实现了新的突破:Park等[18]提出了一种3-DOF球面3-SPS冗余并联机构,结合CGA和冗余度可以快速得到运动学逆解的最优解;Kim等[19]采用CGA从奇异性的角度求解3-SPS/S冗余并联机构的逆解的最优解。在算法效率方面也取得了一些成果:Tørdal等[20]提出的CGA算法计算效率是矩阵代数算法的两倍。除了高效率,CGA算法的计算过程也比传统的算法更加简单。
对于串联机器人的位置逆解一直在研究中,除了D-H矩阵法和CGA法,还有四元数和对偶四元数等方法,对于不同的机构,建模方法不同,计算效率和遇到的困难也不相同。在这几种方法中,CGA在算法等方面的优势显而易见,然而在轨迹规划和控制等方面只是进行了初步设想,未来CGA在这个问题上的优势难以估计。总之,在串联机器人位置逆解问题上,建模方法的研究还有很长的路要走。
3 基于CGA的空间机构位置正解研究进展
对于并联机构而言,由于支链之间的耦合性,造成位置逆解容易获得、正解不易获得。对于该问题的研究,首先要对并联机构进行分类,如传统并联机构、平面并联机构、冗余驱动并联机构和刚柔耦合并联机构等。传统方法遇到的主要问题是多元高次方程求解不易,尤其是新型冗余驱动机构和刚柔耦合并联机构的求解过程特别复杂,导致在这个问题上一直没有一种适用于所有机构的求解方法。将CGA引入该问题,张忠海等[21]基于CGA得到了4-UPU空间并联机构的正解,其过程简洁明了,没有繁杂的矩阵代数计算。对于一般并联机构,应用此方法都可以得到正解[22-27]。
在平面并联机构中,倪振松等[28]将CGA应用于平面并联机构位置正解的求解过程。张英等[29]基于CGA提出的免消元计算方法加快了平面并联机构位置正解的研究进展。张忠海等[30]将CGA结合Sylvester结式方法求解平面并联机构的正解,该算法的优势是能避免一般消元法产生的增根。黄昔光等[31]将CGA应用于平面并联机构的正解求解过程,提出了由移动副和转动副组成的平面并联机构的等效模型,应用CGA可以同时解得1 140种平面并联机构的正解,并且能够得到全部解,无漏根,无增根。邱健等[32]将CGA应用于Stephenson平面并联机构,在得到运动姿态输入输出方程后,推导出了能够快速找到机构死点位置的判别式。
CGA在冗余驱动并联机构上也有应用。Kim等[33]将CGA应用于3-SPS/S冗余并联机构,得到了位置正解,并提出了一种最优解选取方法。该方法为求解冗余并联机构的位置解提供了新的思路。马朝阳[34]、高俊林[35]则是将CGA应用于不同的冗余并联机构或混联机构。
对并联机构位置正解的研究一直是机构学的热点问题,尤其是位置解的研究决定了后继工作如工作空间、奇异性等方面的进展。对于该问题已有相对完整的研究理论,如数值法、解析法还有包括神经网络、遗传算法在内的智能算法,但是这几种方法对于耦合性强、结构复杂的并联机构来说效果依然不好。CGA不仅揭示了机构运动的几何特征,而且在算法上不需要考虑坐标系的建立以及复杂的旋转角计算。目前对于传统的空间并联机构和平面并联机构的理论研究已相对完备。随着科技的发展,并联机构已发展为高精度、微操作的冗余驱动并联机构或者混联机构,但是CGA在这方面应用的研究较少。虽然未来CGA在位置解的研究过程中会发展到哪一步还不得而知,但是根据目前的研究来看,它的进一步发展值得期待。
4 基于CGA的空间机构奇异性的研究进展
机构在特殊位形下,实际自由度与理论自由度不等的情况,被称为奇异位形。由于机构处于奇异位形将失去控制,因此奇异位形成为机构学研究的热点之一。目前对奇异位形的研究主要是如何避免工作空间中的奇异位置。因此,能否获得一个机构的全部奇异位形是研究奇异性的第一步。
在位置解的基础上,不少学者利用CGA求解机构的奇异性。Li和Tanev等[36-38]利用CGA求解并联机器人的奇异性,发现CGA在处理6-DOF以下的并联机器人奇异性时提供了良好的几何洞察力和效率。Huo等[39]在奇异性方面提出了一种基于CGA的判定方法,该方法有助于运动分析和优化设计,特别易于用计算机语言实现编程,极大地提高了计算效率。Yao等[40]提出了一种用CGA度量并联机器人奇异性贴近度的指标,该指标没有坐标系,但具有清晰的物理意义和几何意义,而且该指标还可以应用于结构参数的选择、路径规划和结构设计。奇异位形的研究方法目前并不成熟,传统的研究方法有螺旋理论法、雅可比矩阵法和线几何法等,但是没有方法能参数化地表示整个奇异位置形成的超曲面[41]。作为一种新方法,CGA在这方面的研究几乎没有,未来是否可以用CGA解决这个问题还有待研究。
5 基于CGA在刚柔耦合和冗余驱动机构的设想
刚柔耦合并联机构和冗余驱动并联机构是并联机构领域的研究热点,CGA在这两方面的应用潜力如下:
1)由于科技的快速发展,空间机构的研究开始向高精度的方向发展。在这种情况下,刚体的弹性变形会引起重大的误差。在实际生活中,不存在全刚体,因此刚柔耦合被人们逐渐重视起来。尤其在康复医疗方面,基于全刚体空间机构的康复机器人已不能满足需求,因此有必要对刚柔耦合进行研究。由于存在弹性体,导致机构的动态分析过程变得十分困难,因此将CGA应用于刚柔耦合的康复机器人运动学分析是机遇,也是挑战。
2)冗余驱动并联机构作为一类特殊的并联机构,在刚度和稳定性、工作空间等方面有很大的优势。由于冗余支链的增加,使冗余机构的位置解求解过程更为复杂。将CGA应用于冗余驱动并联机构可以避免复杂的迭代计算,且可以通过冗余度快速得到最优解。可惜的是,对于结构复杂的冗余驱动并联机构的研究较少,如何将CGA应用于这类机构还有待研究。
6 结束语
本文分析了CGA的计算特征,对CGA在空间机构位置解的求解方法进行了探讨。作为几何代数的重要分支,目前CGA在机构学的应用有限,多数学者只是证明了CGA在位置解求解过程中的正确性和有效性,如何提高位置解的计算效率、将CGA更好地应用于轨迹规划和奇异性等方面还需要进一步研究。此外,将CGA应用于康复机器人领域将是机构学领域的重要机遇和挑战。