九相永磁同步推进电机系统主动切套运行控制策略
2021-02-24翟自斌郑晓钦李修东
翟自斌,郑晓钦,李修东
九相永磁同步推进电机系统主动切套运行控制策略
翟自斌,郑晓钦,李修东
(青岛大学电气工程学院,山东 青岛 266071)
主动切套运行是多套多相电机特有的一种对称故障运行方式,可根据负载率选择最佳的运行绕组套数,以优化电机系统效率。本文以三套三相绕组构成的九相永磁同步推进电机系统为研究对象,研究了电机主动切套的控制方法,通过考虑切套前后推进电机本体及其逆变器损耗的变化,得到九相永磁同步推进电机系统全转矩范围内损耗最小的切套运行方式。通过对9kW九相永磁同步推进电机原理样机进行Simulink仿真计算,验证了理论分析的正确性。
九相永磁同步电机;切套控制;损耗分析
0 前言
电力推进分系统作为舰船综合电力系统中的主要分系统,也是电能需求量最大的分系统,其重要性不言而喻[1]。高效率、高转矩密度、高可靠性是对大容量推进电机系统的基本要求[2]。推进电机系统损耗的降低成了提高效率的关键因素,需要综合考虑推进电机本体以及逆变器的损耗[3]。
相比于传统的励磁电机,永磁同步电机能够获得更高的效率与转矩密度,特别适合在空间受限的多功能舰船上使用[4]。同时,绕组经多相化设计后,可使用低压开关器件实现大功率驱动,转矩脉动减小,可靠性提高,具有更多的控制资源和自由度[5]。鉴于多相永磁电机的诸多优势,已逐步应用于各国大容量舰船的推进系统中[6]。
不同于传统多相绕组结构,多相永磁推进电机常采用多套多相绕组结构。一方面,当电机某相绕组发生故障时,可将故障相所在的整套绕组切出,牺牲部分带载能力,最大程度的保证故障电机平稳运行;另一方面,在舰船作业与巡航减速航行时,为避免功率逆变器在轻载工况产生不必要的损耗,可根据负载需要主动切套运行,以提高推进系统效率。因此,为提高整个推进系统的可靠性和高效性,开展多相永磁推进电机切套运行研究势在必行。文献[7]针对九相磁通切换永磁电机轻载运行工况,主动关闭其中部分相绕组,使用一套或两套三相绕组工作就可以满足输出要求,减小逆变器损耗,优化推进系统的效率。文献[8]针对四套三相绕组构成的十二相永磁推进电机系统,研究了分组控制的驱动系统容错控制方式。当某相出现故障时,切出故障相所在的整套绕组及控制通道,保证故障电机可靠运行。文献[9]针对三套五相绕组构成的十五相感应推进电机切套减额运行工况,得到电机切套减额运行时与负载相适应的最大输出转矩。
本文针对三套三相绕组构成的九相永磁推进电机系统,研究了推进系统全转矩范围内,主动切出不同套数绕组运行的控制方式,以及同时考虑不同切套运行时推进电机本体及其逆变器的系统损耗变化,得出与负载相适应的最优切套运行方式。
1 九相永磁同步电机绕组结构
本文研究的九相永磁同步电机定子绕组由三套三相开端绕组构成,每两套三相绕组互成p/9电角度,采用H桥逆变电路分别驱动各相[9]。图1所示为电机切套运行前后的绕组变化。图2所示为九相H桥逆变电路的拓扑结构。

图1 九相永磁推进电机切套减额运行前后绕组变化

图2 九相H桥逆变电路拓扑结构
2 九相永磁同步电机切套运行数学模型
2.1 电机正常运行时的数学模型
九相永磁同步电机是一个高阶、非线性、强耦合的多变量系统,在a-b-c坐标系下对其数学模型进行分析较为复杂,为简化分析,将其数学模型解耦到0坐标系中,解耦矩阵及其逆矩阵为:

式中,子矩阵为:

式中,表示绕组套数,取值为1,2,3。
解耦后0坐标系各轴电流分量仍为交流量,为方便控制,需将其转化为d-q-0坐标系下的直流量,变换矩阵为:
式中,为同步角位移,有=d,为电角速度。
九相永磁同步电机在d-q-0坐标系下的电压方程、磁链方程、转矩方程和运动方程分别为:



式中,有:






2.2 切套运行对数学模型的影响
多相永磁同步电机切出不同套数绕组运行时,部分参数会发生变化[10],需要重新计算。根据文献[11]可知,两相绕组重合时的主电感m表达式为:
式中,0为空气相对磁导率;定子极距;ef为定子有效长度;为定子绕组每相串联匝数;wv为定子绕组基波绕组因数;p为极对数;ef为气隙有效长度。
由式(8)可以看出,定子两相间的主电感m仅与电机结构有关,与相数无关。因而,电机切套运行时,m不发生变化。
定子漏感sσ是计及所有相绕组共同作用时的定子每相漏感。根据文献[12]可知,定子漏抗受相数影响较大,且没有规律可循,因此只能重新计算。定子漏感主要包括端部漏感、槽漏感、谐波漏感三部分。根据文献[13]介绍的方法,可分别计算九相永磁同步电机不同切套运行时的漏感参数,详见表1。

表1 切套前后定子漏感参数变化
3 九相永磁同步电机切套运行的实现
3.1 切套运行控制策略
图3所示为基于三d-q模型的九相永磁同步电机切套控制框图。整个控制回路由转速外环和电流内环组成,设置了转速调节器和电流调节器来进行控制。
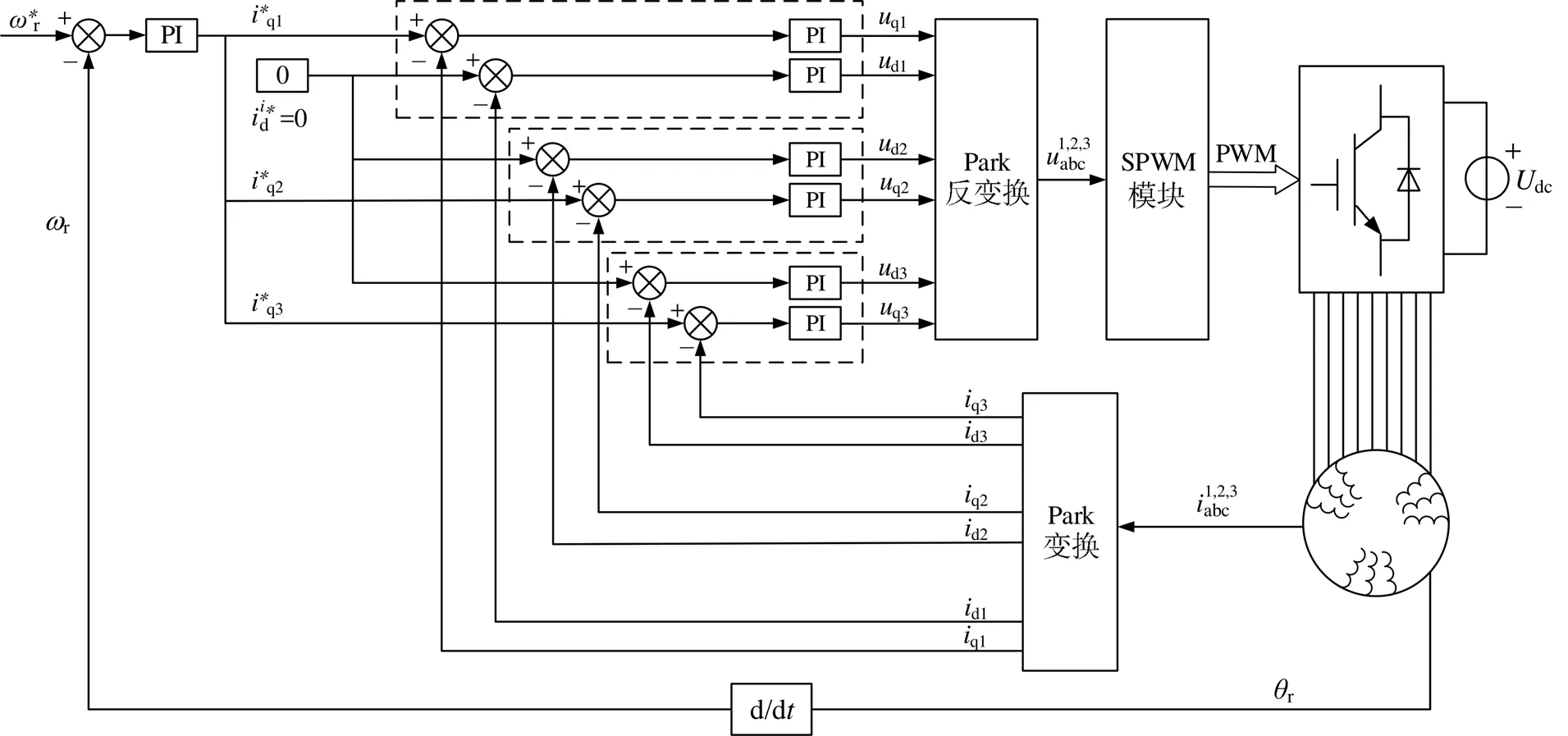
图3 基于三d-q模型的九相永磁同步电机切套控制框图
图3中三个虚线框的内容为三套三相绕组的控制部分。每切一套三相绕组运行时,就有一个虚线框中的控制部分退出运行,剩余绕组继续工作,保证了电机的不间断运行。仿真电机参数见表2。

表2 九相永磁同步电机参数
对九相永磁同步电机正常运行、切一套三相绕组运行和切两套三相绕组运行分别了进行仿真。图4~6所示为相应运行条件下加载后的电流和转矩。

图4 九相永磁同步电机正常运行时电流、转矩波形

图5 九相永磁同步电机切一套三相绕组运行时电流、转矩波形

图6 九相永磁同步电机切两套三相绕组运行时电流、转矩波形
3.2 推进电机系统的损耗分析
3.2.1 电机本体损耗
电机本体损耗的增加会导致电机运行效率降低。九相永磁同步电机运行时主要的电磁损耗包括:铁耗、永磁体涡流损耗和铜耗[14]。文献[7]建立了电机损耗模型,并分析出电机缺相运行时,电机内部损耗发生改变的只有铜耗,其余损耗变化不大。因此,进行切套控制损耗分析时,电机本体损耗只需计算铜耗的增加。
九相永磁同步电机铜耗计算与切套后电流大小有关,通过对切套控制后的电流进行分析,可得到切套控制电机内部损耗的变化。
由文献[8]得知,在电机系统不过载的情况下,三相绕组运行时,负载率不得超过33%;六相绕组运行时,负载率不得超过66%;九相绕组运行时,加载不得超过额定负载。电机进行切套控制时,在系统不过载的前提下,得到了计及运行绕组相数和负载率的铜耗,见表3。

表3 计及运行绕组相数和负载率的铜耗
3.2.2 逆变器损耗
逆变器主要由IGBT和反并联二极管组成[15],二者进行开关时,会产生逆变器损耗。逆变器总损耗包括通态损耗和开关损耗[16]。
(1)IGBT通态损耗
IGBT的通态损耗与导通压降、流过IGBT的电流、占空比有关。IGBT的通态损耗为:

式中,con_IGBT为IGBT通态损耗;CE()为IGBT导通压降函数;c()为流过IGBT的电流函数;Q()为IGBT占空比函数;为调制波周期。
(2)IGBT开关损耗
IGBT的开关损耗与其开关特性有关,包括开通损耗和关断损耗,可表示为:

式中,sw_IGBT为IGBT开关损耗;sw为开关频率;on()为导通一次的能耗函数;off()为关断一次的能耗函数。
(3)二极管的通态损耗
二极管的通态损耗与导通压降、流过二极管的电流、占空比有关。二极管的通态损耗为:

式中,on_Diode为二极管的通态损耗;F()为二极管的导通压降函数;F()为流过IGBT的电流函数;D()为二极管的占空比函数。
(4)二极管的关断损耗
二极管的开通损耗远小于关断损耗,因此,只需计算二极管关断损耗即可。二极管关断损耗为:
式中,sw_Diode为二极管的关断损耗;rec()为反向恢复能耗函数。
九相永磁同步电机进行切套控制时,逆变器损耗随着相数的减少而降低。电机进行切套控制时,得到了计及运行绕组相数和负载率的逆变器损耗,见表4。

表4 计及运行绕组相数和负载率的逆变器损耗
九相永磁同步推进电机系统切套控制损耗变化包含电机内部损耗变化和逆变器损耗变化。将表3与表4中损耗相加,可得到切套控制时,推进电机系统的损耗变化,如图7所示。
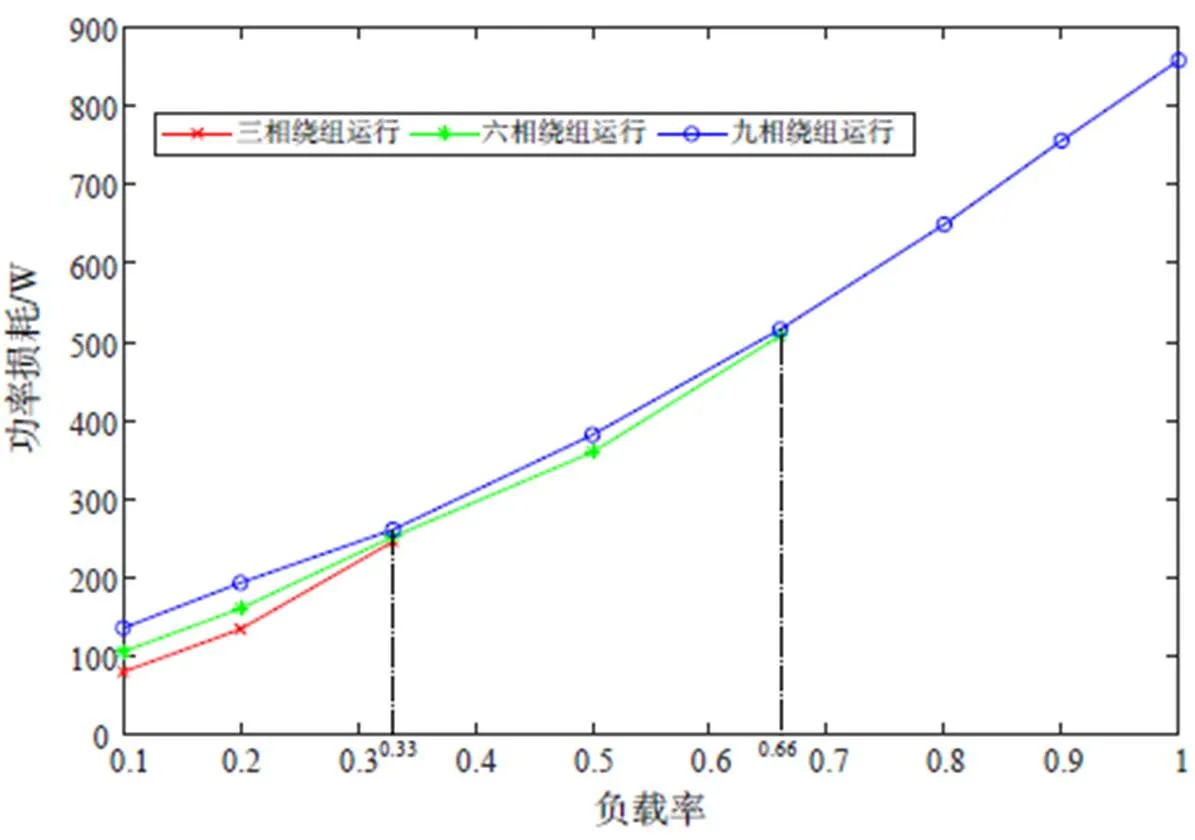
图7 推进电机系统损耗分析图
由图7可知,在电机系统不过载的情况下,负载率小于0.33时,三相绕组、六相绕组和九相绕组都可以带负载运行,在此情况下,九相绕组带负载运行的功率损耗最大,六相绕组次之,三相绕组最小,故选择切两套三相绕组运行方式最优。负载率为0.33~0.66时,三相绕组投入运行,电机过载,只有六相绕组、九相绕组可以带负载运行,在此情况下,九相绕组带负载运行的功率损耗较大,六相绕组较小,故选择切一套三相绕组运行方式最优。负载率为0.66~1时,为使电机不过流,必须九相绕组全部投入运行,不能选择其他的切套方式运行。
4 结论
本文对三套三相绕组构成的九相永磁同步推进电机进行了切套控制,并进行仿真分析。综合计算了推进电机系统运行时电机本体的铜耗和逆变器损耗,得出电机不过流情况下,全转矩范围内损耗最小的切套运行方式。结论如下:
(1)负载率小于0.33时,切出两套三相绕组运行的功率损耗最小,运行方式最优;
(2)负载率为0.33~0.66时,切出一套三相绕组运行的功率损耗最小,运行方式最优;
(3)负载率为0.66~1时,九相绕组需全部投入运行。
[1] 寿海明,冀路明,马守军.现代船用推进电机技术研究[J].船电技术,2007(1):36-39.
[2] 芮江,由大伟.舰船综合电力推进技术的现状和发展趋势[J].舰船科学技术, 2010, 32(4):3-6.
[3] 马伟明. 舰船综合电力系统中的机电能量转换技术[J]. 电气工程学报, 2015, 10(4):3-10.
[4] 华斌, 周艳红, 等. 电机技术在舰船电力推进系统中的应用研究[J]. 微电机, 2015, 48(5):101-105.
[5] 欧阳红林. 多相永磁同步电动机调速系统控制方法的研究[D]. 湖南大学, 2005.
[6] 周长攀. 双三相永磁同步电机驱动及容错控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
[7] 於锋. 九相磁通切换永磁电机系统及容错控制研究[D]. 南京: 东南大学, 2016.
[8] 魏永清, 康军, 曾海燕, 朱鹏. 十二相永磁电机驱动系统的容错控制策略[J]. 电工技术学报, 2019, 34(21):4467-4473.
[9] 郑晓钦, 王东, 刘海涛, 孟繁庆. 十五相感应推进电机切套减额运行转矩计算[J]. 电工技术学报, 2019, 34(1):58-65.
[10] 郑晓钦, 马伟明, 王东, 易新强, 刘海涛. 十五相感应电机不对称缺相容错运行控制[J]. 中国电机工程学报, 2018, 38(4):1212-1221.
[11] 郑晓钦. 多相感应电机缺相运行研究[D]. 武汉: 华中科技大学, 2017.
[12] 郑晓钦, 王东. 十五相感应电机对称缺相运行时的定子漏抗计算[J]. 电工技术学报, 2016, 31(15):25-31.
[13] 张伟玲. 十二相整流同步发电机系统整流桥故障运行模式的研究[D]. 青岛大学, 2016.
[14] Pang Y, Zhu Z Q, and Howe D. Eddy current loss in the frame of a flux-switching permanent magnet machine[J]. IEEE Transactions on Magnetics, 2006, 42(10): 3413-3415.
[15] 白保东, 陈德志, 王鑫博. 逆变器IGBT损耗计算及冷却装置设计[J]. 电工技术学报, 2013, 28(8):97-106.
[16] 於锋, 程明, 田朱杰, 张蔚. 九相磁通切换永磁电机主动缺相运行控制策略[J]. 电工技术学报, 2019, 34(8):1626-1635.
Active Symmetrical Fault Operation Control Strategy of Nine-phase Permanent Magnet Synchronous Propulsion Motor System
ZHAI Zibin, ZHENG Xiaoqin,LI Xiudong
(College of Electrical Engineering, Qingdao University, Qingdao 266071, China)
Active symmetrical fault operation is a unique symmetrical fault operation mode ofsynchronous motor composed of multiple sets of multi-phase windings. The optimal number of running winding sets can be selected according to the load rate to optimize the efficiency of the motor system. This paper takes the nine-phase permanent magnet synchronous propulsion motor system composed of three sets of three-phase windings as the research object, and studies the control method of the motor's active symmetrical fault. By considering the changes in the loss of the propulsion motor and its inverter during symmetrical fault operation, the symmetrical fault operation mode with the smallest loss in the full torque range of the nine-phase permanent magnet synchronous propulsion motor system is obtained. Simulink simulation calculation of a 9kW nine-phase permanent magnet synchronous propulsion motor prototype verified the correctness of the theoretical analysis.
nine-phase PMSM; symmetrical fault control; loss analysis
TM341
A
1000-3983(2021)01-0014-06
国家自然科学基金资助项目(51907093);山东省自然科学基金资助项目(ZR2019BEE009)
2020-06-16
翟自斌(1996-),现为青岛大学电机与电器方向全日制硕士研究生,研究方向为多相永磁同步电机控制。