松软地面下履带车辆斜坡转向特性
2021-02-24刘西侠宋海军邱绵浩
张 宇, 刘西侠, 李 军, 宋海军, 邱绵浩
(陆军装甲兵学院车辆工程系, 北京 100072)
履带式车辆凭借其接地比压小、牵引力大等优点,被广泛应用于消防[1]、农业[2]、军事等领域,特别是其优越的爬坡越障性能,可以较好地适应丘陵、山地等大坡度地形行驶。在这种复杂地面行驶时,履带车辆不可避免地要进行频繁地非常规操纵,比如越障驾驶、斜坡转向等。对于无人驾驶履带车辆而言,其运动规划与控制提出了挑战。
目前的履带车辆行驶理论研究针对水平面转向、纵向力或横向力单独作用下转向运动学和动力学特性进行了较为系统的分析,而对于越野地面下履带车辆的斜坡转向特性研究较为缺乏。
在已有的履带车辆斜坡转向动力学特性研究中,张战文等[3]着重研究了地面纵向坡度、横向坡度对履带式车辆匀速转向的影响。史青录等[4-5]分析了瞬时转向中心偏移量的变化规律及影响因素,指出了导致转向不稳定的因素。闫清东等[6]建立了斜坡转向动力学模型,分析了接地面瞬时转向中心偏移量和转向所需的制动力和牵引力的变化规律及不同转向半径和坡度对转向稳定性的影响。薛乃雄[7]考虑车辆行驶过程中履带滑动与转向离心力的影响,基于UM(universal mechanism)系统对车辆在斜坡转向行驶中转向半径、履带法向负荷、履带中动态张紧力等参数在车辆转向过程中变化规律。张海宁[8]分析了采矿车在深海底极稀软底质下转向行走过程中受到的牵引力和阻力,针对采矿车在深海底斜坡上行走的安全性和稳定性提出了控制要求。岳锋等[9]对丘陵山地履带车辆斜坡转向性能进行了综述研究,总结了现有研究成果,分析尚待解决的问题,指出了斜坡转向性能研究的必要性、前沿性。李世武等[10]针对轮式车辆坡道行驶,将采集的坡道信息转化为障碍空间进而建立避障模型,利用A*算法规划最优通过路径。Dong等[11]针对铰接式履带车辆斜坡转向性能进行了动力学分析,研究了坡角及车辆结构参数对转向性能的影响。
对于履带式无人车辆,没有人为的经验干预,为了满足复杂工况和地形下的自主行驶需求,设计控制算法时必须充分考虑各种复杂条件下的运动学动力学特性[12]。而履带车辆行驶的路面通常是越野复杂路面,如沙土、黏土、积雪等,地面性质对车辆性能有较大的影响。不考虑车辆工况、地面性质影响的斜坡转向模型在应用于无人驾驶控制时,存在精度不够,引起路径规划不准,易导致无人车运动规划或轨迹跟踪控制出错。
在已有履带车辆斜坡转向动力学分析基础上,分析车辆工况以及地面性质变化对履带车辆斜坡转向滑转滑移性能的影响,通过左右侧履带滑转率这一关键参数的变化来判断车辆是否能完成规定半径的转向动作,以为无人驾驶履带车辆的运动规划和跟踪控制打下基础。
1 履带车辆斜坡转向动力学模型
履带车辆在坡角为θ坡道上进行转向运动,转向角速度为ω、方位角为φ时的车辆运行情况,以坡道平面为基本面,建立如图1所示XOY坐标系,其中C为车辆中心,G为车重。
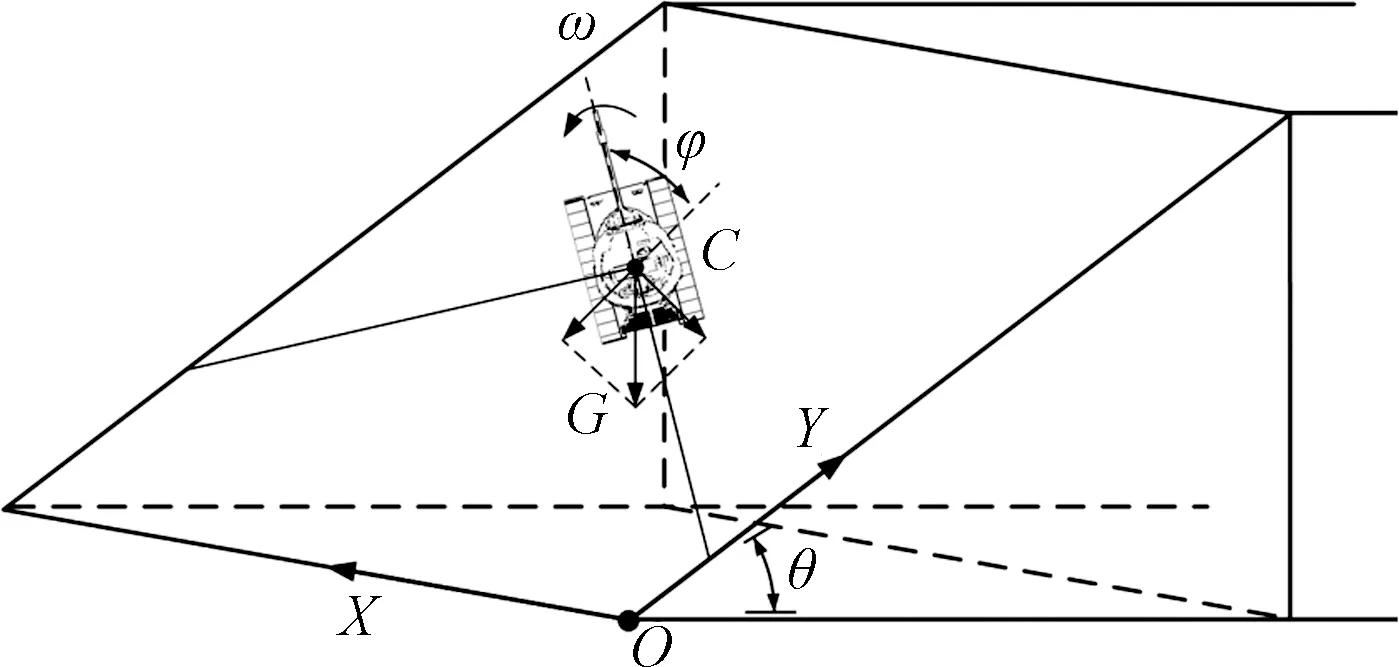
图1 履带车辆斜坡转向受力示意图Fig.1 Schematic diagram of ramp steering force on tracked vehicle
图2为履带车辆在坡道上转向的方位图[6],依据φ的不同范围,可以划定第一、二、三、四象限,分别对应上坡下转向、下坡下转向、下坡上转向、上坡上转向4个转向阶段,依据不同象限分析不同阶段转向特性。
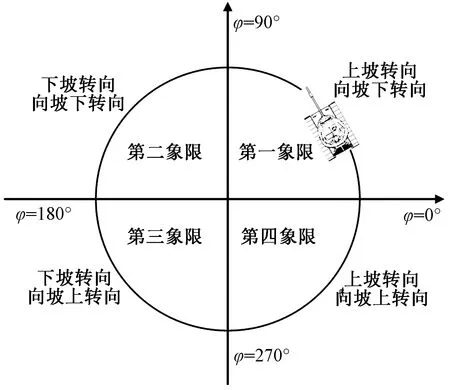
图2 履带车辆斜坡转向方位图Fig.2 Azimuth map of tracked vehicle on ramp
根据文献[6]可知,履带车辆斜坡转向时,内侧履带法向负荷为

外侧履带法向负荷为
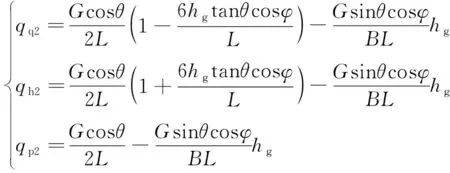
式中:qq、qh、qp分别代表履带前端、后端、中心距位置法向负荷;L为履带接地长,m;B为履带中心距,m;hg为重心距地高,m。
求得车辆总的横向外力矩M为


式(3)中:μ为车辆转向时的阻力系数;λ为接地面瞬时转向中心偏移量。
履带车辆斜坡转向时所受的外力如图3所示。

F1、F2分别为转向时内、外侧履带所需的制动力和牵引力;R1、R2分别表示地面变形阻力;V为车辆转向速度; Mμ为车辆转向阻力矩;X为车辆所受纵向力,Y为车辆所受横向力;e为车辆接地面时转向中心
要使车辆匀速转向必须满足力平衡和力矩平衡,列方程式为

可求得
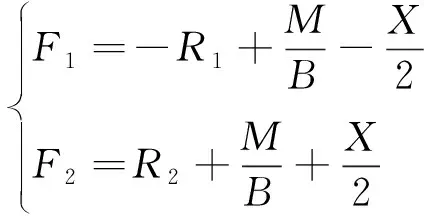
式中:
其中f为地面变形系数。
选取某履带车辆参数进行实例仿真计算:车重m=21 000 kg,履带中心距B=2.81 m,履带接地长L=4.45 m,质心位置距地高hg=0.81 m。地面变形阻力系数f=0.05,地面最大转向阻力系数μmax=0.8。图4显示的履带车辆斜坡转向时不同坡角外侧履带牵引力和内侧履带制动力随车辆方位角φ的变化曲线。
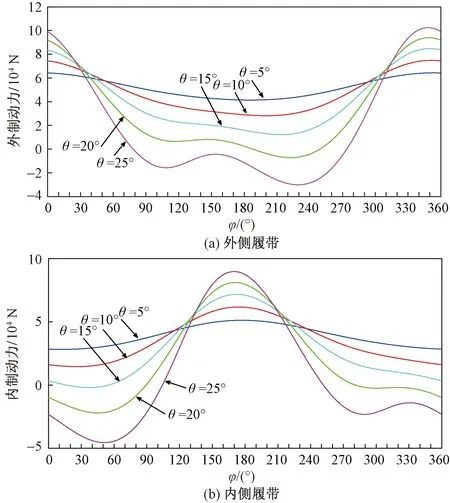
图4 不同坡角履带受力变化曲线Fig.4 Variation curve of track force at different slope angles
从图4可以看出,牵引力是两头大,中间小;制动力是中间大,两头小。随着坡角增加,牵引力两端逐渐增加,中间部分逐渐减小;制动力是两端逐渐减小,中间部分逐渐增加。在一定方位角下,内侧履带需要牵引力,外侧履带需要制动力。
求出两侧履带牵引力和制动力变化规律之后,对于松软地面,按照地面力学理论中地面剪切力与剪切位移之间的关系式,可以求出斜坡转向时两侧履带滑转率的变化规律。
2 斜坡转向时履带滑转率求解
对于沙地面、黏土地面、积雪地面以及大多数扰动地面等类型的越野地面,可以使用指数函数来描述对应的剪切应力-变形关系[13],即
τ=τmax(1-e-j/K)=(c+σtanΦ)(1-e-j/K) (6)
式(6)中:τ是剪切应力;j是剪切位移;c是地面内聚力;σ为法向应力;Φ为地面内抗剪强度角;τmax为最大剪切应力;K为剪切位移参数。
履带所能产生的总剪切力为

式(7)中:b为履带宽度,m。
图5为履带与地面相对运动示意图。可求得履带剪切位移与滑转率之间的关系,即

Vj是履带相对于地面的滑转速度,Vt为理论速度,x为履带上一点距离接触面前方距离,r为轮半径,ω1为轮角速度

式(8)中:i为履带划转率。
所以

通过把地面剪切能够提供的最大剪切力与履带所受的牵引力、制动力相对应,从而求出两侧履带的滑转率,当滑转率超过限定值时,说明地面无法提供足够的力,导致履带发生完全滑转滑移,从而使车辆失稳失控,说明车辆无法完成规定半径的转向动作。下面通过两侧履带滑转率仿真来分析地面性质、坡度角、车辆工况等对履带车辆斜坡转向性能的影响。
3 仿真分析
选取5种典型地面:重黏土、雪、砂、Petawawa沼泽、LETE沙,地面参数如表1所示[14-15]。
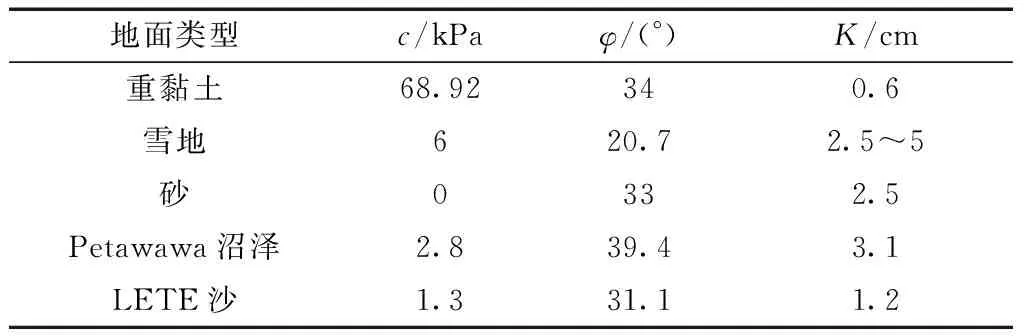
表1 5种地面参数
3.1 坡度角对履带车辆斜坡转向性能影响
图6为雪地地面不同坡角下斜坡转向内侧履带滑转率变化示曲线,可以看出随着坡角的不断增加,内侧履带滑转率逐渐增加,当坡角达到15°时,当车辆方位角在155°~210°时,内侧履带滑转率超过1,发生完全滑移,无法完成规定半径的转向动作。图7重黏土地面不同坡角θ时斜坡转向内外侧履带滑转率i变化示曲线。
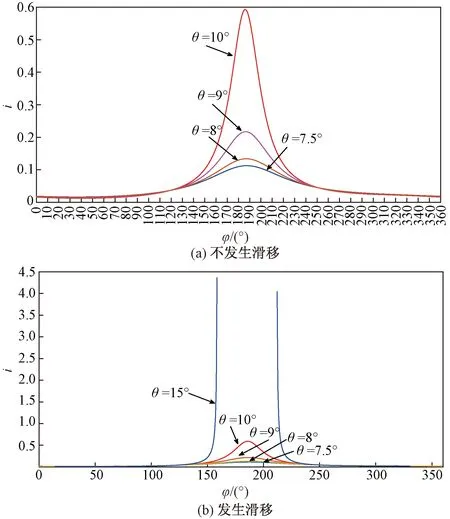
图6 雪地不同坡度角斜坡转向内侧履带滑转率变化Fig.6 Changes in slip rate of inter track of ramp steering at different slope angles on snow
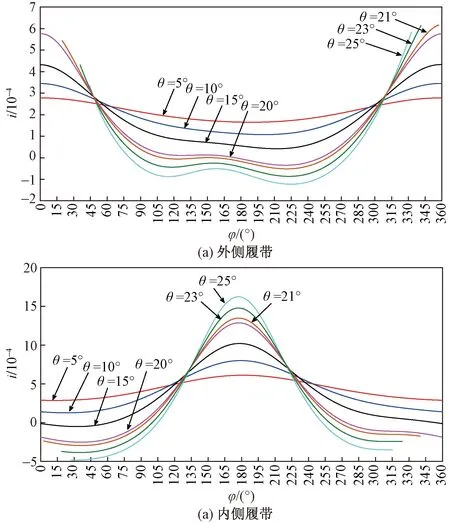
图7 重黏土不同坡度角斜坡转向履带滑转率变化图Fig.7 Changes in slip rate of inter track of ramp steering at different slope angles on heavy clay
如图7所示,相比雪地,车辆在重黏土地面下可以完成更大坡度角的圆周转向,当坡度角θ=21°时,就会在一象限开始和四象限末尾处发生完全滑转滑移的现象,意味着履带车辆在上坡阶段容易发生滑转滑移。随着坡角的增加,发生完全滑转滑移的方位角范围也越大。
通过雪地与重黏土地面的对比,可见,在不同地面性质,车辆斜坡转向性能不同,接下来分析不同地面条件下履带车辆斜坡转向内、外侧履带的滑转滑移情况。
3.2 地面性质对履带车辆斜坡转向性能影响
在相同坡角、转向半径、转向速率前提下,按照选定的5种地面性质进行仿真分析,图8为5种地面性质内外侧履带的滑转滑移变化情况。
由图8所示,内聚力较好的地面,如重黏土,可以使车辆完成更大坡角的斜坡转向。对于车辆而言,制定驾驶控制策略时要依据地面条件,忽略地面条件的影响会使车辆的规划控制出现偏差,无法完成规定转向动作,甚至发生失稳失控的现象。
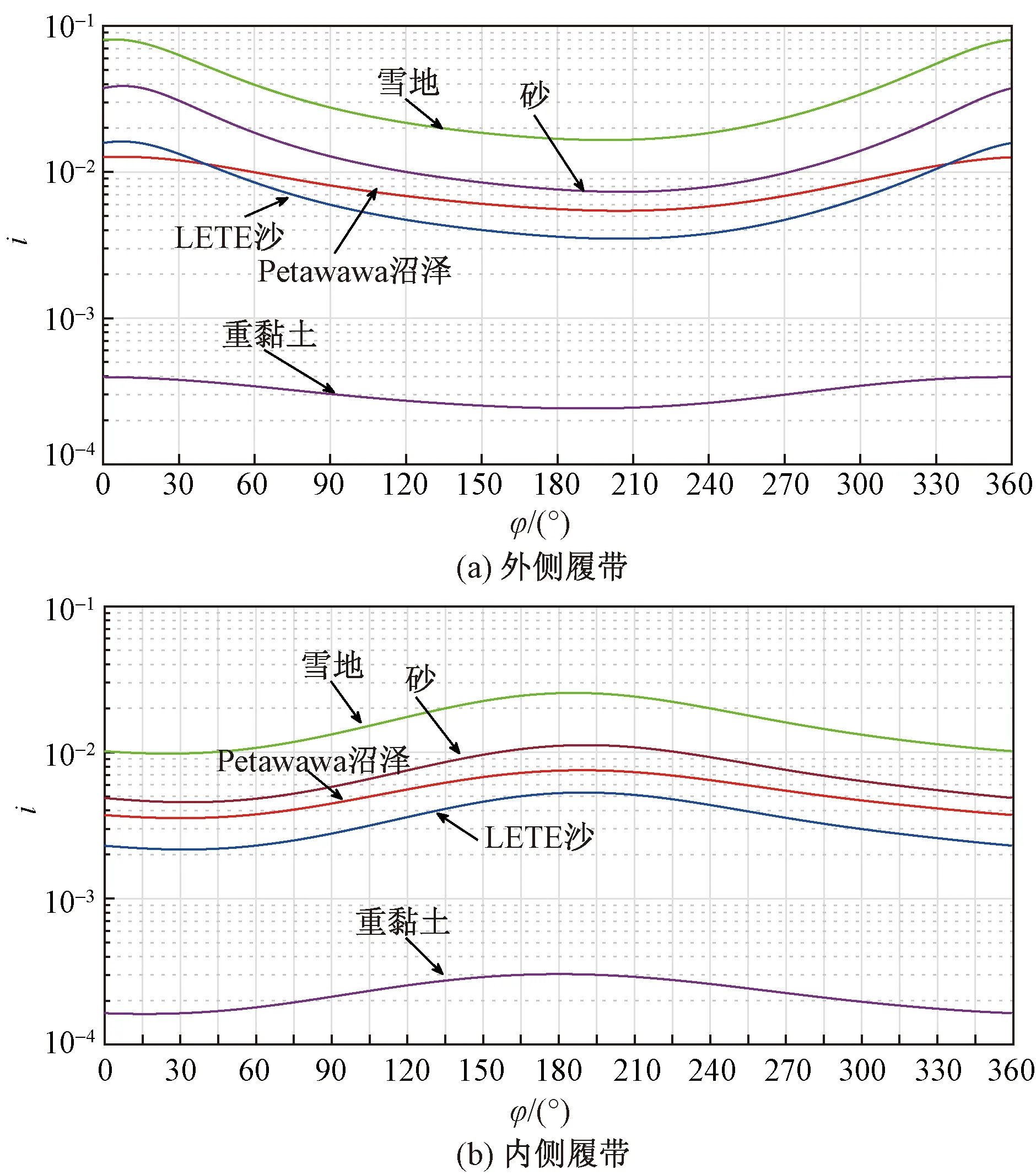
图8 不同地面性质斜坡转向履带滑转率变化Fig.8 Changes in slip rate of ramp steering at different slope angles on five types of terrains
3.3 转向半径对履带车辆斜坡转向性能影响
在坡角θ=10°,重黏土地面下,选取转向半径,R=10、20、30、40、50 m进行仿真,如图9所示为5种转向半径内外侧履带的滑转滑移变化情况。

图9 重黏土不同转向半径斜坡转向履带滑转率变化图Fig.9 Changes in slip rate of track of ramp steering at different steering radius on heavy clay
如图9所示,随着车辆转向半径的增加,内外侧履带的滑转率均降低。车辆进行小半径转向时,会需要地面提供更大的力。所以在斜坡转向时,选择小半径急转向时容易发生完全滑转滑移,导致车辆失稳失控,甚至是侧翻现象。
4 结论
(1)坡角越大,滑转滑移越大,超过一定值将会引起完全滑转,对于在越野路面上行驶的履带车辆而言,在大坡度情况下,选择斜坡转向要谨慎。
(2)地面性质对斜坡转向性能影响较大,地面性质良好的地面,履带车辆可完成较大坡度角的完整转向过程,地面性质差的地面,履带车辆只能完成有限坡道角的完整转向过程,在选择斜坡转向时,首先要注意收集地面性质信息,已确保完成预定转向动作。在重黏土地面,履带车辆能够完成19.5°的坡角转向,而在雪地地面,当坡角达到15°时,则会发生完全滑移,完成不了规定转向半径斜坡转向动作。
(3)随着转向半径的增加,两侧履带的滑转滑移均降低,车辆能够完成规定半径的转向动作,在地面性质较差的斜坡上转向要选择较大的转向半径。
特定地面条件下,履带车辆可以完成固定半径的转向过程,当地面条件不足以支撑履带车辆完成圆周转向过程时,履带将会发生完全滑转滑移现象,使车辆无法完成规定转向动作,甚至发生失稳失控。对于双侧电机驱动的履带车辆而言,要控制两侧电机转速输出,使履带的卷绕速度在滑转率的影响下依然能够完成规定的转向半径转向。但是,当履带发生完全滑转时,则会使车辆发生失控,无法控制轨迹,无法完成规划的转向动作。所以,制定无人驾驶履带车辆的斜坡转向控制策略时,要充分考虑坡度角、地面性质等条件,制定两侧履带相应的转向半径、转向速度,完成履带车辆的轨迹规划和跟踪控制,使车辆平稳安全顺利地通过斜坡越野路面。
