商用车AEB系统测试场景构建及仿真研究*
2021-02-23蔡博陈韬回春檀廷军
蔡博, 陈韬, 回春, 檀廷军
(1.中国汽车技术研究中心有限公司, 天津 300300;2.中汽研汽车检验中心(武汉)有限公司, 湖北 武汉 430056)
据统计,中国近5年死亡10人以上的重特大交通事故均由商用车引发,提高商用车主动安全水平迫在眉睫;交通事故中70%由撞车事故引起,而撞车事故主要表现为追尾。自动紧急制动(AEB)作为一项主动安全技术,在车辆检测到前方存在碰撞危险时能自行启动行车制动系统为车辆施加制动力,降低车辆行驶速度,从而避免发生碰撞。JT/T 1094-2016《营运客车安全技术条件》中规定车长大于9 m的营运客车应装备车道偏离预警系统(LDWS)及AEB系统,随着车辆智能化水平的逐步提高及GB/T 38186-2019《商用车辆自动紧急制动系统(AEBS)性能要求及试验方法》、JT/T 1242-2019《营运车辆自动紧急制动系统性能要求和测试规程》、JT/T 883-2014《营运车辆行驶危险预警系统技术要求和试验方法》等标准的实施,商用车装配AEB系统已成为一种趋势。当前智能网联汽车自动驾驶最先有望实际落地的场景将主要由商用车、专用车来实现,其中商用车的应用场景包括城市公交、城市物流、高速公路、干线物流,专用车的应用场景包括矿区矿山、港口码头、园区接驳、工厂。另一方面,与乘用车相比,商用车自重大、车身宽且长、轮胎直径大,自动驾驶商用车对车辆的控制要求比乘用车高,驾驶场景也更复杂。目前国内商用车AEB系统性能测试评价尚处于起步阶段,亟待各企业加大研发力度。该文从各类智能网联汽车自动驾驶功能测试场景来源中提取关键共性与个性场景要素,考虑场景可移动性、可组合性及易搭建性进行场景元素分类,构建智能网联汽车自动驾驶功能测试场景,从商用车自动紧急功能测试评价技术着手,建立商用车AEB典型测试场景,搭建自动驾驶功能控制模型,进行AEB系统测试仿真分析与测试验证。
1 场景采集与场景元素分类
1.1 自动驾驶测试场景概述
测试场景及场景搭建是智能网联汽车测试评价中的关键,测试场景数据主要来源于U-NCAP和E-NCAP等标准法规、共享出行车辆采集的自动驾驶数据、交通事故数据(CIDAS数据库)、模拟试验所得仿真及理论分析数据,而通过多种来源的测试数据库寻找典型场景的成本高、任务复杂。
不同数据来源的场景数据之间存在差异,且原始采集数据中存在很多无效数据、错误数据,对场景数据进行适当处理才能形成对自动驾驶测试场景有用的测试场景。另一方面,可基于各种自动驾驶测试场景数据来源,通过匹配ESC、AEB等功能特点进行场景筛选,然后通过概率分布统计和聚类分析等获得典型驾驶场景,结合实际测试试验与工程经验,设计得到相关测试用例(见图1)。
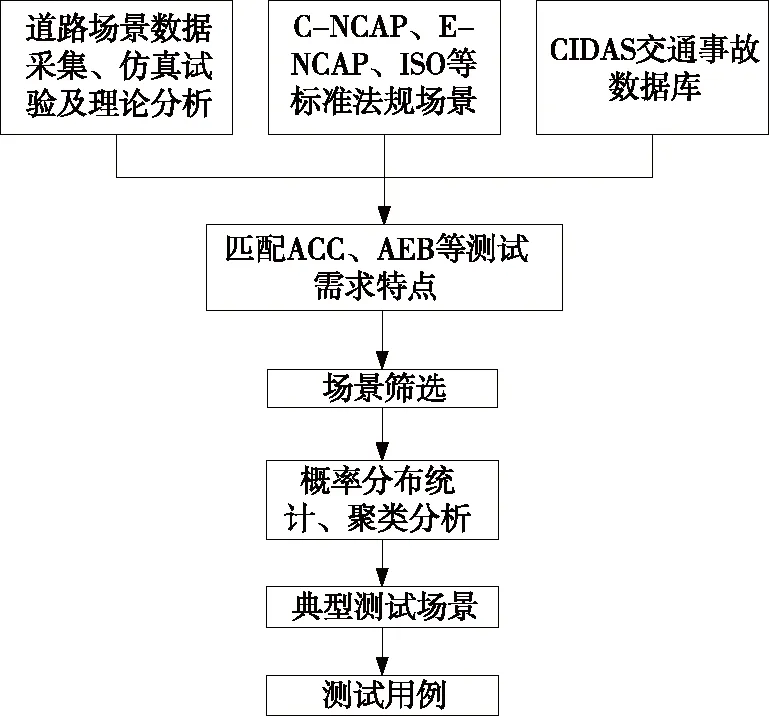
图1 智能网联汽车测试用例生成
1.2 基于场景元素的测试场景库构建
真实交通场景复杂多变,数据量非常大,在现实中无法穷尽所有场景,而从标准法规、自然驾驶数据、仿真和理论分析等场景数据中筛选得到测试需求场景的过程繁琐、效率低下。分析大量场景数据,发现每个场景工况都可被抽象为多个变量参数的组合。为此,对当前智能网联汽车测试场景需求进行分析,剖析多元化场景数据中的关键测试场景元素,归纳各类场景中的共性和个性特征,同时考虑测试场景可移动性、可组合性及易搭建性,构建智能网联汽车自动驾驶测试场景。
如图2所示,根据自动驾驶典型测试场景分析进行场景特征元素提取,实现场景解构,搭建基于人-车-路-环境模型的场景元素分类架构,对各类场景元素进行基本整理与分类。

图2 场景元素分类
智能网联汽车的驾驶场景覆盖自然驾驶、危险工况、人机共驾数据及道路交通交互等多个方面,其在实际工况时的场景数不胜数,构建测试场景时,无法在有限的区域内构建现实道路中的无限场景。因此,场景元素分类采用场景融合和柔性设计理念,具有易组合性、快搭建性、强扩展性的特点。
2 商用车AEB系统场景搭建
AEB是一种汽车主动安全技术,主要由控制模块(ECU)、测距模块和制动模块构成,其中测距模块的核心包括微波雷达、人脸识别和视频系统等,它可提供前方道路准确、实时的图像和路况信息。通过激光雷达、毫米波雷达和摄像头感知前方道路环境,识别到危险时通过报警声和闪烁灯提醒驾驶员。如果驾驶员没有反应,则在碰撞前AEB系统开始起作用,提前主动采取制动措施以避免或减缓交通事故。目前各类法律法规、标准中的自动紧急制动测试场景有前车静止测试场景、前车慢行测试场景、前车制动测试场景、行人自动紧急制动系统等。
在智能网联汽车自动驾驶方面,商用车比乘用车有着更强的需求、更明确的目标和商业场景,故从需求侧来看,商用车自动驾驶有望最先落地。根据AEB系统的技术发展和实际交通事故场景的需求,
各试验规程的测试评价内容在逐渐丰富,但目前国内已有AEB测试评价方法存在场景单一、评价参数单一的问题,如缺少夜间测试、雨雪天气测试等。
基于前文搭建的具有易组合、快搭建、强扩展特点的场景元素分类框架,选择2018版C-NCAP中AEB CCR系统性能测试场景中的前车制动测试场景(CCRs)作为自动紧急制动典型场景进行场景搭建与仿真测试评价,在车辆主动安全仿真软件Pre-Scan中进行自动紧急制动测试场景建模,采用前述场景元素法进行测试场景构建(见图3)。

图3 商用车AEB性能测试场景
根据车辆主动仿真软件中搭建的商用车自动紧急制动场景,场景可描述为:厢式货车以50 km/h的速度跟随前方以同样速度行驶的轻型厢式货车行驶,两车都在单向三车道的中间车道沿同一方向行驶,两车纵向距离为40 m,前方轻型厢式货车检测到前方车辆停车等待红灯,便以一定减速度减速停车,以此检验厢式货车的自动紧急制动功能。
按照上述智能网联汽车测试场景元素分类架构,提取场景元素进行整理,结果见图4。图4已概括出该场景中各测试场景要素,表明文中提出的测试场景元素分类架构合理,可为智能网联汽车场景库搭建提供参考与借鉴。
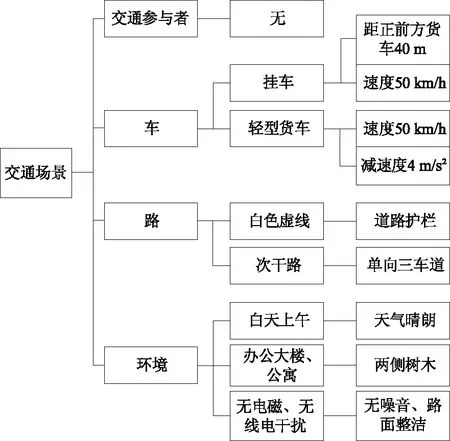
图4 场景要素分类结果
3 AEB系统测试仿真分析与验证
3.1 AEB系统控制模型搭建
在前文所搭建的商用车自动紧急制动典型测试场景中,前方轻型厢式货车以一定减速度减速停车,后方厢式货车在其正后方以同样的速度跟随,若AEB系统未起作用,则厢式货车与轻型厢式货车存在碰撞的可能。针对前文所搭建的商用车AEB典型测试场景,搭建商用车AEB系统控制模型,利用主动安全系统开发验证软件PreScan与可视化仿真工具Simulink进行联合仿真。
根据搭建的测试场景,采用Inherited Path Definition的方式规划测试车辆与目标车辆的行驶轨迹,并进行车辆行驶速度与相对位置设定,在测试车辆上安装TIS传感器检测测试车辆周围的物理环境,包括测试车辆与目标车辆之间的相对距离、相对速度、角度、运动方向等,以便于仿真测试。最后在Simulink中搭建商用车AEB系统控制模型,选用仿真软件模型库中自带的AEB系统模型作为测试车辆在自动紧急制动测试场景中的控制算法模型,再添加传感器模块、车辆自身参数模块、路径跟随模块、车辆动力学模块、动画显示模块等组成控制系统。将测试车辆控制各模块进行有效连接(见图5),建立两个仿真软件之间的交互数据连接,形成一个完整的闭环控制系统。

图5 车辆控制流程
3.2 测试仿真
完成商用车自动紧急制动功能系统场景搭建、车辆动力学模型及控制系统模型搭建后,PreScan与Simulink进行实时信息数据流交互,进行测试场景下AEB系统仿真测试。 在单向三车道的次干线道路上,厢式货车以50 km/h的速度跟随前方距离40 m、以相同速度行驶的轻型厢式货车在中间车道中间行驶;轻型厢式货车发现前方车辆在队列停车等待红绿灯,开始以4 m/s2的减速度减速并停车;后方自动驾驶测试车辆启动AEB功能,测试车辆感知系统中TIS雷达时刻进行扫描检测与前方目标车辆的相对距离、相对位置、相对速度等;如图6所示,测试车辆以40%的制动减速,油门开度为零,同时发出自动紧急制动警示提示预警。

图6 测试车辆状态
测试车辆根据与前车的相对距离、相对速度自动控制自身减速度、速度等(见图7)。当检测到前方目标车辆减速时,测试车辆AEB系统控制模块开始执行,车辆及时进行减速制动,有效避免与前方厢式货车发生碰撞。
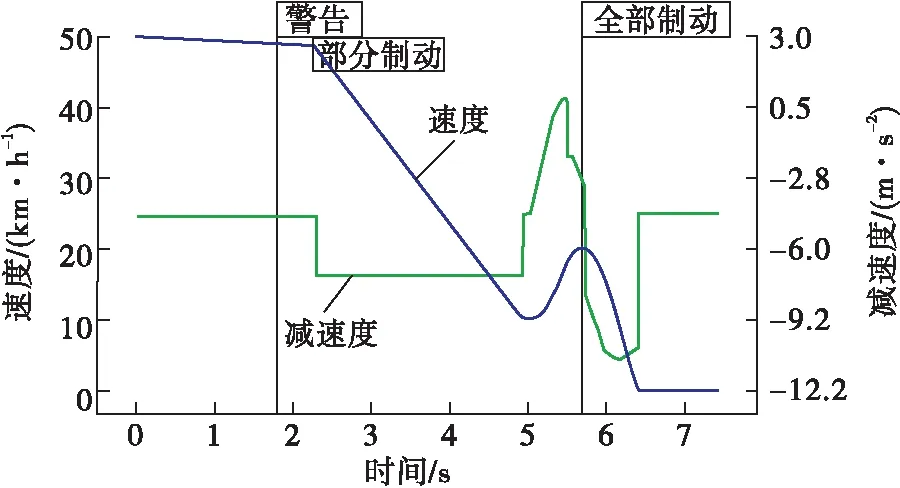
图7 车辆运行参数
4 结语
针对智能网联汽车最有望落地的商用车干线自动驾驶场景,研究智能网联汽车自动驾驶功能各类测试场景的共性与个性特征,考虑场景搭建的场景元素可移动性、可组合性、可扩展性及场景搭建便捷性,构建智能网联汽车自动驾驶功能测试场景分类架构,结合商用车自动紧急制动功能需求,进行测试场景构建,并在仿真软件中进行仿真分析与测试验证。仿真结果表明所搭建的智能网联汽车场景分类架构合理,商用车自动紧急制动功能测试场景与测试评价方法合理,可为智能网联汽车场景构建与仿真测试提供新的思路与借鉴。
