某型海警舰艇电站自动化控制设计
2021-02-23刘亚雷顾晓辉胡旭东
刘亚雷,顾晓辉,胡旭东
(1.中国人民武装警察部队海警学院舰艇指挥系,宁波 315801; 2.南京理工大学智能弹药技术国防重点学科重点实验室,南京 210094)
随着中国海洋战略及“一带一路”的提出,海警部队迅速发展,海警舰艇吨位由几百吨发展到千吨级、万吨级。舰艇的电气系统是一个大型的电站发电和电能传输系统[1-3]。某型海警舰艇电站由原动机、发电机和附属设备(组合成发电机组)及配电板组成,为全舰提供电能,是舰艇电力系统的供电枢纽,舰艇供电的最主要环节。此舰利用柴油机作为原动机,配电板由各种开关、保护电器、测量仪表、调节和信号装置等电器设备按一定要求组合而成,实现电能的接收及分配。电站具有自动监控单元,实现机组自动起动、投网、调频调载、自动准同期并车、投切负载、重载询问、负载转移、自动停机和运行参数的控制、显示及故障监视等功能。随着舰艇运行工况的不同,电站提供的电力负荷发生变化,如在靠岸工况下,电力负荷为430 kW,而在巡航工况下,可达到1 300 kW。因此,如何可靠、稳定保障舰艇在不同工况下电力负荷的分配,有效地实现电站的监测使用,是保证舰艇安全航行、完成海警部队维权执法等各项任务的关键。
文献[4]针对电站直流并网系统中存在的升压比较低、各光伏单元输出变化时复杂的功率控制和电压平衡问题,提出了一种基于磁集成变压器的电站直流并网拓扑方案,建立了系统数学模型,在稳态和暂态下进行了仿真分析。文献[5]针对当前电站自动功率控制算法没有针对不同用电量进行相应的功率控制,导致功率控制效果不佳,稳定性较差的问题,提出了一种新的不同电站自动功率控制算法,给出了大型光伏电站功率分层控制系统结构,试验验证了所提算法的控制效果。上述研究成果从不同角度研究了电站并网过冲的升压及功率转换问题,从理论上给出了相应的解决方案,但是针对电站并车过程中的电网数据监测、报警、并列监测等问题涉及甚少。此外,虽然舰艇电站自动化监控系统存在着多种方式并行的局面,但具体到其内部的控制器应用,却不外乎单片机、可编程逻辑控制器(programmable logic controlle,PLC)、数据传输系统(data communication system,DCS)、工控机等几大类[6-7]。相较于这几类控制器,可编程逻辑控制器(PLC)是比较受人瞩目的[8-10]。由于PLC接线十分简单,方便安装,容易编程,有较短的开发周期而且学起来十分简单,再加上PLC的抗干扰能力强的同时带来的可靠性,因此很少出现故障,维护起来比较简单。值得一提的是PLC有较强的防潮、抗震、耐热等能力,对于舰艇上的严酷工作环境给予了巨大的帮助。
现以某型海警舰艇电站为研究对象,针对在不同舰艇航行工况下电站电力参数(电压、电流、功率、频率等)稳定性问题开展研究,以PLC为控制核心,结合模拟量输入、电力模拟量传感器及上位机人机界面等模块,开展了基于PLC的某型海警舰艇电站自动化设计的研究,特别针对电站并网检测、柴油机数据监测、电网报警方面进行实时跟踪,完善该型舰艇电站自动化的硬件及软件设计,提升该型舰艇的自动化与智能化水平,保证舰艇航行的安全性与可靠性,以期为该型舰艇电站自动化实时监控系统提供技术借鉴。
1 控制系统设计
1.1 控制系统结构
利用 S7-200 PLC作为系统的控制器,结合TPC人机界面完成对舰艇电站自动化监控系统的设计。从系统结构形式上讨论,该系统隶属集散式监控系统,系统参数的数据采集通过模拟量传感器来完成。此外由于系统使用了人机界面,因此,在一定程度上也算是部分引入了现场总线技术,具体设计应用了1套人机界面对2套发电机组进行监控。系统结构如图1所示。监控系统要求监测的参数主要有电网参数、柴油机参数、发电机参数。监控系统需要控制的参数主要有柴油机速度、起/停车执行、并/脱网执行。

图1 控制系统结构
1.2 控制系统硬件设计
通过以上分析,故决定本系统选用西门子S7系列的PLC CPU 226,并结合4个4通道模拟量输入模块(EM231)作为本次设计的控制核心。CPU S7-226主机具有24个数字量输入点和16个数字量输出点,2个RS485通信口。另外CPU 226主机还内置6路高速计数输入,2个100 kHz的高速脉冲输出端口。该设备具有较强的扩展能力,拥有较多接口和内置部件。同时系统自带较多内置功能。这些都使得该设备具有较为明显的优势,性能好、处理效率高,是该系列产品中配置最高的一种机型,所以S7-226 PLC完全能够满足本系统的功能和I/O需求。汇总以上各项I/O需求便得到系统的I/O总需求,即输入数字3点,输出数字10点,模拟量输入14点。控制系统I/O分配如表1所示。

表1 控制系统I/O分配
1.3 控制系统电气原理图
在电路系统设计中,一般要通过电气原理图来描述各个电气设备的结构以及连接方式,这种方式有助于明确整个电气线路的结构,降低电路中可能存在的故障问题。电气原理图总体划分为控制电路、主电路、配电电路等部分。根据系统的功能要求以及各种元件的使用手册绘制电气原理图,如图2~图4所示。
图2所示为系统电气连接主电路图,N为中线,A、B、C、L1、L2、L3为三相电网首尾端,T1~T4尾电感线圈,T5为变压器。此电路图实现了发电机电源与电站配电站之间的电力传输,包含该型舰艇的主动力电源输配送(AC380V)、照明等供电输配送(AC220V)、控制电路输配送(DC24V)。

图2 电气原理图-主电路
图3所示为控制系统PLC数字量控制电路图,该部分主要用于控制的运行操作,如启动、停止、复位等,此外还包含了系统控制输出(柴油机速度、柴油机运行控制、并网控制)及系统状态指示(运行状态、声光报警)。

图3 PLC数字量控制电路
图4所示为PLC模拟量控制电路。该图设计了控制系统模拟量数据采集,主要包含电网数据(如电网中的电流、电压、功率和频率)、柴油机的数据(如润滑压力、气瓶压力、冷却温度、排烟温度)、发电机数据(如发电机的电压、电流、功率、相位、绕阻温度、频率)。

图4 PLC模拟量控制电路
2 控制系统软件设计
2.1 系统程序控制流程
在该型电站自动化控制过程中,调用PLC数据转换程序,检测电网、柴油机及发电机的各项数据。在发电机组启动时,若超过3次需要间隔一段时间才能重启。具体相关控制流程如图5所示。
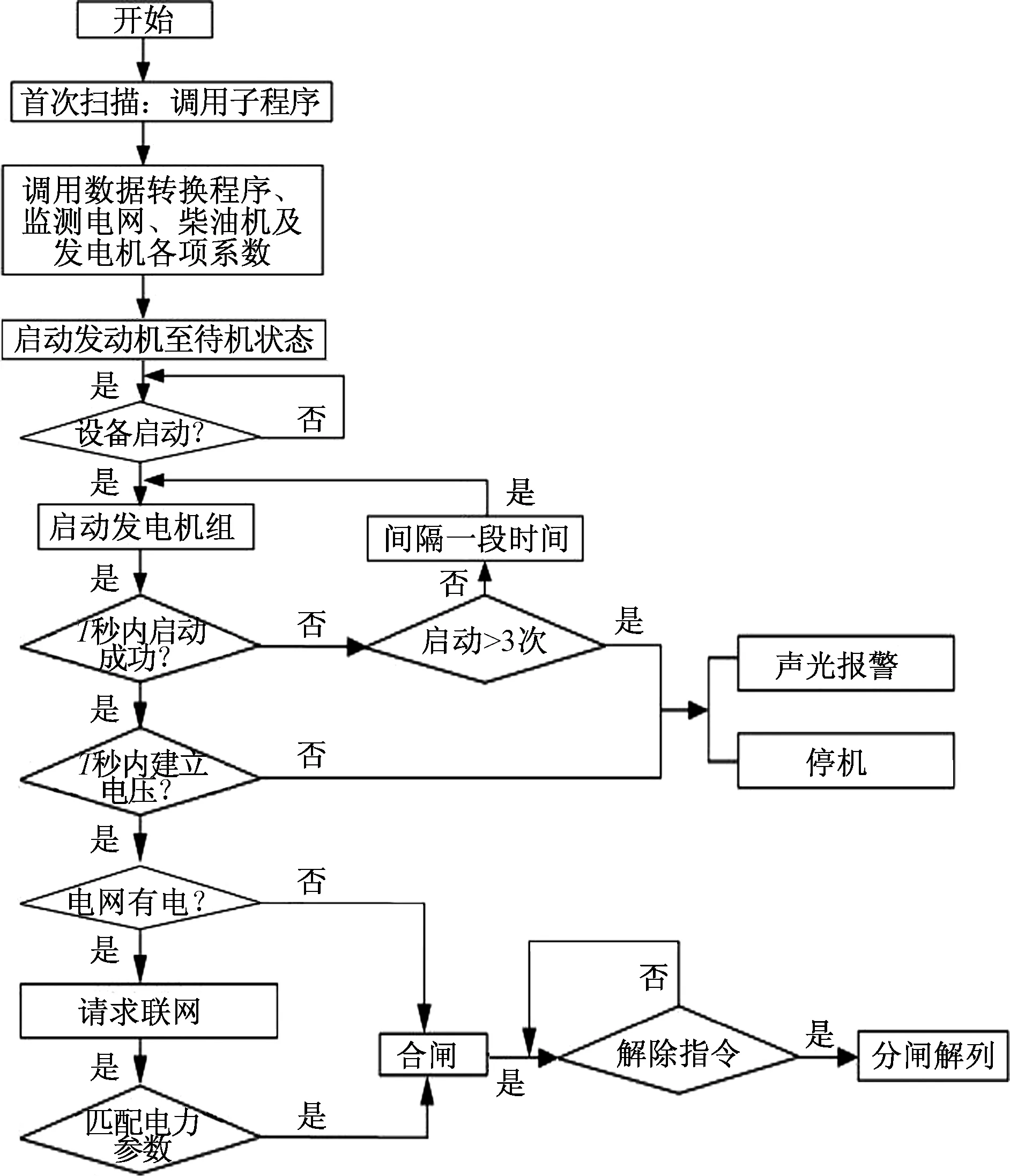
图5 系统程序控制流程
2.2 PLC程序设计
系统控制程序大体可分为主程序、子程序两大模块。由于模拟量数据比较多,如果每一个模拟量数据都展开的话,那么整个程序过程复杂,增加了计算量及控制执行时间,因此,采用程序结构模块化的设计思路,在PLC程序设计中将模拟量转换到工程量的程序单独作为一个子程序,并形成为一个程序块,并在程序块中留出相应的参数输入输出接口,所有类似的程序就可直接调用该“程序块”,简化了PLC程序的复杂性。具体程序如下。
2.2.1 数据转换程序(模拟量工程量转换)
在系统应用过程中需要通过数据转换程序来对模拟信号进行转换,其中模拟量通常以电压(0~10 V)、电流(0~20 mA、4~20 mA)形式输入到PLC,经过PLC内部的A/D转换,表现为数字模式,即数字量,模拟量称作工程量。模拟量与工程量之间有很大的不同,但也存在着一定的数学联系,可以通过一定的算法实现从模拟量到工程量的转换。在S7-200 PLC程序,即是把压力的模拟量值(0~32 000)转换为以MPa为单位工程量数据。设计中,模拟量量程为0~20 mA,模拟量值则在0~32 000,工程量量程为工程量最小至工程量最大。图6所示为模拟量数据类型转换程序,图7所示为工程量值计算数据。

图6 模拟量数据类型转换程序
2.2.2 控制系统部分主程序
根据图5编写PLC控制程序,其中主程序的功能主要体现在启停、报警以及其他控制功能,具体如图8~图15所示。
图8所示为电网数据监测程序,主要用于舰艇电站电网的参数的监测,如电压、电流、功率等参数。
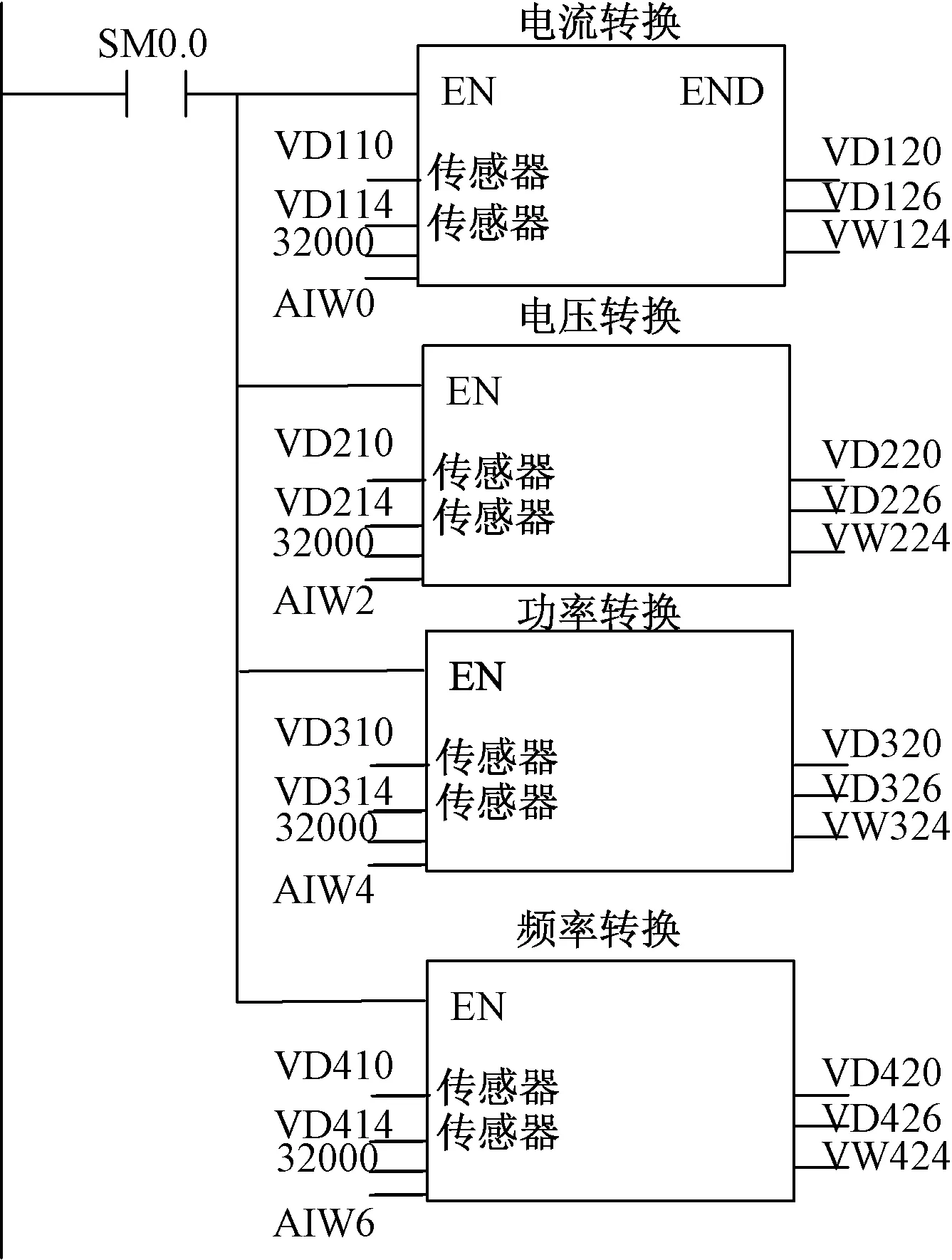
图8 电网数据监测程序
图9所示为柴油机数据监测程序,主要用于发电柴油机组的参数监测,如润滑压力、气压、排气温度、冷却泵温度等。

图9 柴油机数据监测程序
图10所示为发电机数据监测程序,用于电站发电机组数据参数的监测。

图10 发电机数据监测程序
图11所示为电网报警监测程序,主要设置电网电流、电压、功率等参数的上下限报警。
图12所示为柴油机机报警监测程序,主要用于实时监测柴油机运行参数情况。
图13所示为发电机报警监测程序,主要由于发电机组的实时参数运行监测。
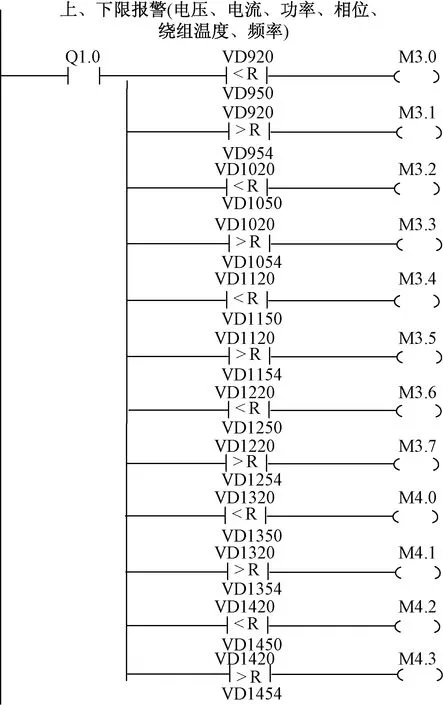
图13 发电机报警监测程序
图14所示为设备启动监测程序,用于监测设备的启动是否成功。

图14 设备启动监测程序
图15所示为电站合闸、并列检测程序图,用于监测电站电网并车与解列。

图15 电站合闸、并列检测程序
3 系统调试
系统调试过程分为PLC程序调试、人机界面调试。程序调试经过程序编译、程序下载、运行在线监控、数据读取、数据写入等步骤。结合“按钮”和“运行策略”,最终通过编辑脚本的方式实现对多个控件的一键调试。首先在界面组态“激活”程序,人机在模拟运行时“启动”,人机立即调用“运行策略”,在执行完“脚本程序”后,最终的结果呈现在界面中。图16所示为所有控件激活状态下的模拟运行结果。
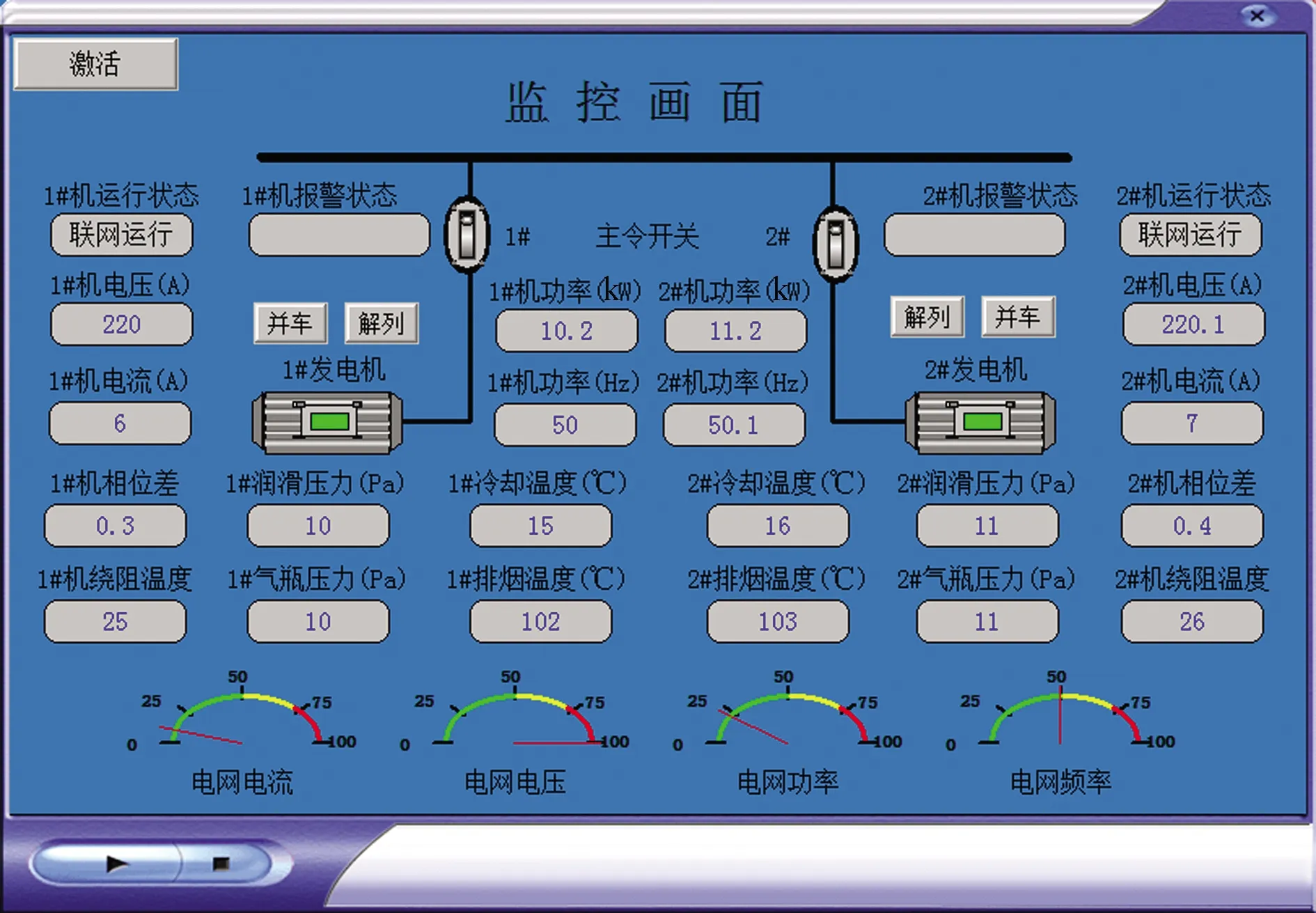
图16 所有控件都激活的模拟运行画面
4 结论
基于PLC技术,结合某型海警舰艇电站系统结构,分别从硬件及软件两部分开展了海警舰艇电站自动化控制系统设计研究。基于电站集中管理、分散控制的原则,完成了包含电网参数采集和系统电源、系统运行操作和系统控制输出及系统状态指示、系统模拟量数据采集、系统控制输出等部分电气原理图的设计,给出了电站自动化监测控制系统程序流程,采用程序结构模块化的设计思路详细编写了电网及柴油机数据监测、电网报警、电站合闸及并列检测等控制程序,为进一步实现工程应用奠定了理论基础。
