无人机光电侦察航线自动规划方法
2021-02-23刘洋,王晶,周明
刘 洋,王 晶,周 明
( 1.西安爱生技术集团公司,西安 710065; 2.西北工业大学第365研究所,西安 710065)
随着现代战争作战方式的转变,无人机在战争中的地位愈显重要[1-3],其主要作战任务就是目标的侦察、探测和监视,相比有人机具有明显的优势,侦察无人机快速发展成为了无人机的主力军,需要根据侦察的目标和范围进行航线规划[4-10],以便使机载侦察设备采集到需要的侦察信息,从而为其他武器协同作战提供保障。
最基本的航线规划方法是通过无人机系统地面控制站软件在数字地图上设置航程点形成航线,然后将规划的航线信息通过无线电数据链上传至飞机,再由机载导航系统控制飞机按照规划航线飞行。这种人工手动规划的侦察任务航线,无法将光电载荷[11-13]的侦察特性和使用方式联系起来,操作过程繁琐,对操作人员要求较高,费时费力效率低且精确度不高,难以适应飞行时快速任务航线规划的需要。
因此,本文提出了一种适用于光电载荷的无人机侦察航线自动规划方法,根据给定的目标区域信息,自动生成侦察任务航线引导无人机执行光电侦察任务。简化了操作流程,提高了光电侦察航线规划的效率。
1 光电侦察无人机系统组成
光电侦察无人机系统组成如图1所示,由无人机平台、光电任务载荷、数据链、以及地面控制车组成。无人机平台包括无人机机体和飞行控制航电设备。数据链包括机载数据链设备和地面数据链设备。地面控制车包括飞行控制、任务控制、任务规划以及情报处理。

图1 光电侦察无人机系统组成框图
当无人机完成起飞并飞行到作战区域上空时,根据光电载荷执行任务[14-15]的模式,分为点侦察和区域侦察,地面飞行操作人员输入待侦察的目标或区域信息,地面控制车任务规划系统自动生成侦察航线,并将规划航线信息通过数据链上传至机载,无人机接收到规划航线和程控命令后将会按照航线飞行,同时光电载荷执行侦察任务并将侦察信息实时下传至地面控制车。
2 侦察航线自动规划方法
2.1 点侦察航线自动规划方法
2.1.1 点侦察参数输入
接受侦察任务目标参数输入:驶入目标区域A点经纬度坐标(LA,BA),驶出目标区域B点经纬度坐标(LB,BB),侦察目标点T点经纬度(LT,BT),海拔高度为HT,无人机在执行侦察任务时相对目标区域的高度为h,无人机围绕目标点作圆周飞行时的盘旋圆的半径为RT,图2中的长方形为目标点所在区域。

图2 点侦察模式目标信息示意图
2.1.2 点侦察航线计算
分别将A点、B点以及T点的经纬度坐标(LA,BA) 、(LB,BB)以及(LT,BT)转换为平面直角坐标(XA,YA)、(XB,YB) 以及(XT,YT),根据3点的位置计算出A点至T点的距离DAT,B点至T点的距离DBT,如式(1)所示:
(1)
通过A点作盘旋圆的切线,切点为S点,通过B点作盘旋圆的切线,切点为E点,如图3所示;计算A点至S点的距离DAS以及B点至E点的距离DBE,如式(2)所示:
(2)

图3 点侦察模式计算关系示意图
A点与目标点T点连线的方向角(与正北方向夹角)为α,线段AT与AS形成的夹角为Δα,同样B点与目标点T点连线的方向角(与正北方向夹角)为β,线段BT与BE形成的夹角为Δβ,计算出α和Δα,如式(3)所示,计算出β和Δβ,如式(4)所示:

(3)
(4)
如图3所示,A点与S点连线的方向角(与正北方向夹角)为α′,B点与E点连线的方向角(与正北方向夹角)为β′。若α-β>0,则α′和β′如式(5)所示;若α-β<0,则α′和β′如式(6)所示:

(5)

(6)
根据方向角α′和β′,A点直角坐标(XA,YA)和B点直角坐标(XB,YB),距离DAS和距离DBE,计算S点和E点的位置(XS,YS)和(XE,YE),如式(7)和式(8)所示:

(7)

(8)
利用坐标转换将S点和E点的直角坐标(XS,YS)和(XE,YE)转换为经纬度(LS,BS)和(LE,BE)。
根据以上计算和推导,得出点侦察模式下侦察航线的航点依次为:
A点驶入点: (LA,BA,HT+h);
S点开始侦察点:(LS,BS,HT+h),指令为开始侦察,盘旋半径为RT,盘旋圆心为(LT,BT),盘旋周期为n,经过n次盘旋后进入E点结束侦察;
E点结束侦察点:(LE,BE,HT+h),指令为结束侦察;
B点驶出点:(LB,BB,HT+h)。
无人机进入任务程控后,由A点进入目标区,驶向S点,在S点开始执行侦察任务,以半径为RT进行圆盘旋,对目标点进行侦察,经过n次盘旋后,在E点结束侦察任务,飞向B点,使出S区,点侦察任务结束。
2.2 区域侦察航线自动规划方法
2.2.1 区域侦察参数输入
为了对区域进行全面无遗漏侦察,在执行任务时采用光栅式搜索路线(弓形航线)。接受侦察任务参数输入:侦察区是宽度为DW、高度为DH的长方形,长方形侦察区的中心点C点的经纬度坐标为(LC,BC),侦察区域倾斜角为θ,如图4所示(一般情况下,为了避免无人机转弯时带来的误差,选取的长方形侦察区域要大于实际的侦察区域),区域海拔高为HS,无人机在执行任务时相对于侦察区域的高度为h,弓形航线的间距为d(间距d和光电平台的视场角以及无人机飞行高度有关,选择的间距一定要满足图像重叠率要求)。

图4 区域侦察模式信息示意图
2.2.2 区域侦察航线计算
假设侦察区域倾斜角为0度,将区域中心点C点的经纬度坐标(LC,BC),转换为直角坐标(XC,YC),计算区域顶点0点(将该点作为弓形航线的起始点)的位置,如式(9)所示:
(9)
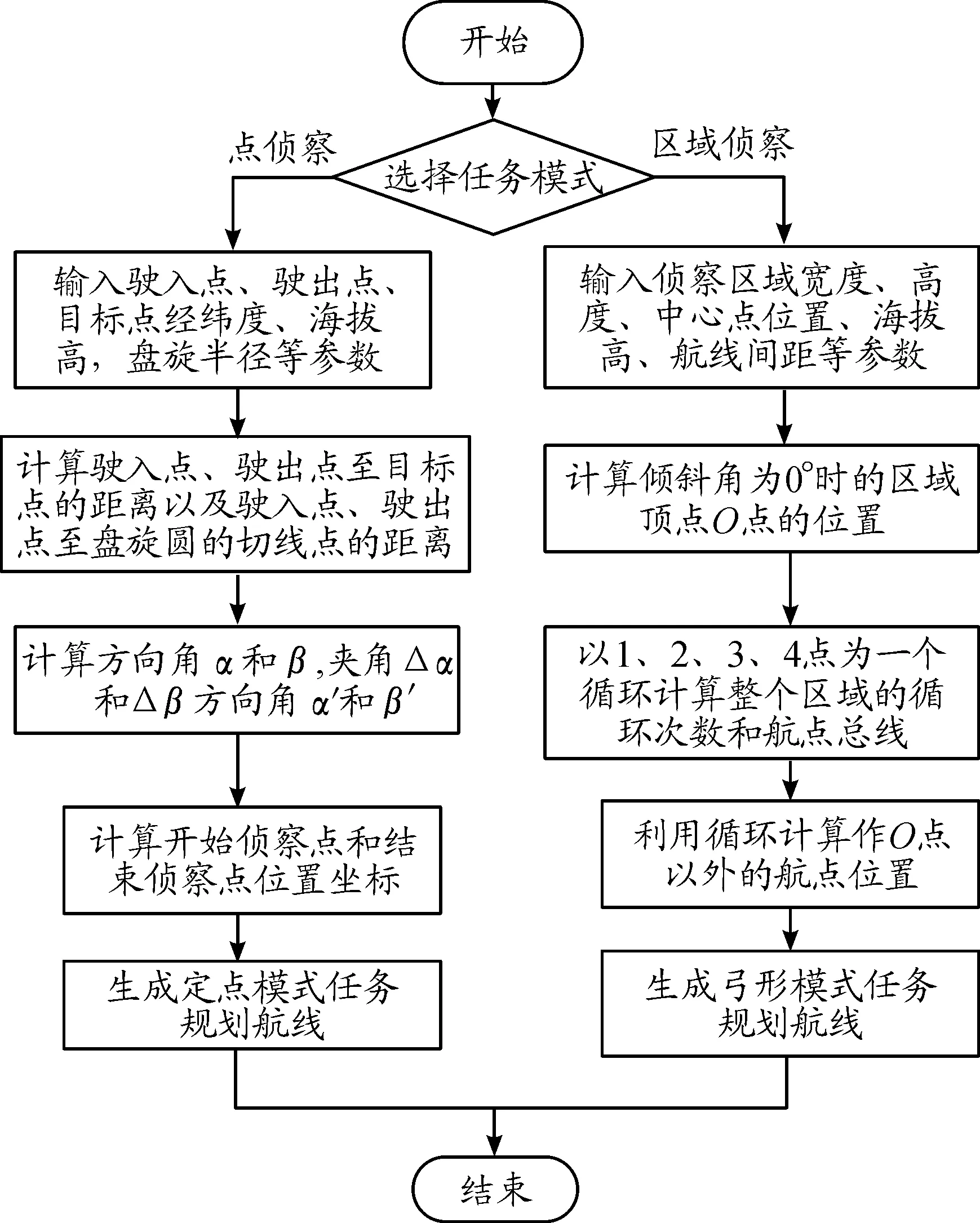
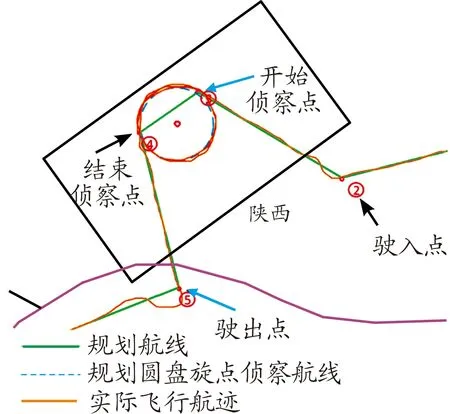
如图5所示,以1、2、3、4四个点为一个循环,计算整个区域的循环次数n=⎣DW/2d」(⎣」为向下取整函数,即⎣X」表示不大于X的最大整数),则整个区域的弓形航线航点数为N=4n+1,对i从0开始进行循环,i (10) (11) (12) (13) 利用给定角度的坐标变换计算侦察区域倾斜角为θ时的弓形航线航点位置,K为航点序号(K从0开始),*代表侦察区域旋转倾斜角θ之后的弓形航线航点,如式(14)所示: (14) 将所有航点直角坐标位置转化为经纬度坐标(LK,BK),所有弓形航线航点高度均为H=HS+h。 图5 区域侦察计算关系示意图 CPU的主频为2.1 GHz;;内存为8 GB;硬盘为512 GB;网卡为1 000 Mbps。 操作系统为Microsoft Windows 7;开发平台为Microsoft Visual Studio 2012;开发语言为C++。 侦察航线自动规划方法被包含在地面控制车任务规划软件中。当无人机到达作战区域上空时,地面指挥人员选择任务模式(点侦察和区域侦察),任务规划软件接收到任务监控发送的侦察点和侦察区域信息,并输入侦察所需参数,地面控制车任务规划软件根据以上信息计算侦察航线航点位置,自动生成侦察航线,并将规划航线信息通过数据链上传至机载,无人机即进入程控并按照航线飞行,完成侦察任务。 基于光电载荷的无人机侦察航线自动规划实现流程如图6所示。 图6 侦察航线自动规划实现流程框图 该无人机侦察航线自动生成方法经某型光电侦察无人机系统飞行,通过任务规划软件将自动生成光电侦察航线嵌入到无人机巡航航线中。 图7为某一架次飞行点侦察自动生成航线和实际无人机飞行航迹,图中绿色线条为规划航线,蓝色虚线为自动规划的圆盘旋航线,橙色为实际飞行航迹,由图可看出点侦察圆盘旋实际飞行航迹基本与规划的圆形航线吻合。 图7 自动生成点侦察航线与实际飞行航迹 图8为某一架次飞行区域侦察自动生成弓形航线和实际无人机飞行航迹,图中绿色线条为规划航线,橙色为实际飞行航迹。能够看出,除了无人机转弯半径本身带来的少许误差(规划的区域要比实际侦察的区域大,将此误差抵消),其余的真实飞行轨迹和规划航线重合度良好。 图8 自动生成区域侦察航线与实际飞行航迹 某型光电侦察无人机利用本光电侦察航线自动生成方法共飞行12架次,其中点侦察8次,区域侦察10次,累计侦察时长32 h。飞行试验的应用验证了该方法的可行性,能够满足无人机光电侦察任务的使用要求。 本文采用基于光电载荷的无人机侦察航线规划方法,利用已知目标区域和目标点信息,计算航点信息,在给定目标区域和目标点的参数后自动生成任务规划航线。将该设计应用于某型侦察无人机系统中,飞行试验结果证实了该方法可免除传统人工在地图上规划航线,极大地提高了无人机光电载荷航线规划效率。





3 侦察航线自动规划实现
4 飞行验证

5 结论
