山东高效农业模式下田间管理装备研究进展与对策*
2021-02-22方会敏牛萌萌褚幼晖陈英凯荐世春
方会敏,牛萌萌,褚幼晖,陈英凯, 2,荐世春
(1. 山东省农业机械科学研究院,济南市,250100; 2. 山东省农业科学院,济南市,250100)
0 引言
现代高效农业是指以满足市场需求和提高综合效益为目标,采用集约化的生产方式,充分合理开发利用农业自然资源和社会经济资源,实现各种生产要素的最佳配置和优化组合,高产、优质、高效的现代农业产业[1-2]。旨在突破产业结构不合理、产品品质下降、生产环境制约、比较效益下降等难题,实现经济、社会和生态综合效益最佳。《山东省新旧动能转换重大工程实施规划》将其作为重点内容进行扶持,《山东省新旧动能转换现代高效农业专项规划(2018—2022年)》更是提出了推进全程全面、高质高效“两全两高”农业机械化的目标。
现代高效农业背景下,山东省田间管理装备的发展面临资源与环境的双重压力。一方面,以除草、施药等为代表的田间管理环节仍然存在机械化率低甚至是“无机可用”的现状;另一方面,现有田间管理装备精准作业能力仍然较低,使得肥药利用率低、肥药资源浪费,同时过量的肥药施用严重威胁了生态安全。本文总结分析了国内外田间管理技术与装备的研发现状,并为山东省现代高效农业模式下的田间管理装备发展提出了有效对策,以期为山东省现代高效农业发展进程中提升田间管理技术与装备水平提供参考。
1 田间管理装备研发现状
纵观农机发展水平较高的欧美地区,田间管理技术已经发展的十分成熟,相应的农机装备涵盖了中耕除草、追肥、施药等作业环节。他们主张为保护土壤和水体,尽可能减少化肥与农药施用量;在此基础上,基于先进传感技术和控制技术,实现农业生产最优效率。欧美地区的田间管理装备引领了高效、节能、环保现代农业的发展,本部分主要介绍国内外田间管理各环节的技术与装备发展情况,其中重点介绍国外各田间管理环节的先进装备,国内则聚焦各田间管理环节关键技术和产品的研发现状。
1.1 产品设计与制造技术
在产品的设计制造上,国外已广泛采用数字化设计和柔性化制造等组合技术。其中欧洲农机产品设计过程采取标准化和模块化技术,其定制化生产和服务已成为强有力的市场竞争手段。美国某著名公司的柴油机实现了依据客户定义进行产品生产;全球某农机巨头公司的拖拉机、收获机已实施了“个性化定制品牌战略”。另外在农机系列装备中,能够基于一个基础平台组合成不同功能的产品:如某公司研制的自走式喷雾机同时具有追肥、玉米去雄的功能,在更换相应头架、组件后完成去雄、追肥等作业,满足不同作业需求。奥地利某公司的PS-MD系列气动式施肥设备可以以单个零部件的形式任意组装到各类型播种机上,进行模块化的安装与拆卸,从而实现现有农机具的种肥同施。意大利某公司的现代化侧边割草机,可以安装在拖拉机前端或后端,无需对设备进行重新配置,增加了机器的通用性。
国内在植保底盘研究方面采用高地隙方式以适应不同类型高杆作物的植保要求。某单位研发的3WZG-650型高地隙自走式喷杆喷雾机离地间隙高,适用于棉花、小麦等作物的作业。某公司的ZP9500高地隙喷雾机搭载了自动导航作业系统,实现喷雾机在极少人工干预情况下的自动导航作业,通过对平台的机-电-液改造,实现了喷雾机作业系统的电气化控制;且关键零部件采用国际化标准设计,整机集成性高,确保零部件发挥性能,可靠耐用。广西某公司提出由动力主模块、功能模块、属具模块组成的“模块化多用途农业装备产品”,通过各种模块的灵活快速组合实现不同的作业功能,满足一机多用、提高机器利用率。农业农村部南京农业机械化研究所提出以动力平台通用化及作业部件模块化为核心,创新提出了“分形而治”“动力平台+”的茶园生产机械化发展技术模式(图1)。

图1 多功能茶园管理动力平台
1.2 机械除草技术与装备
机械除草是降低农药使用量的有效手段之一,国外在机械除草方面广泛应用机器视觉技术[3-4]。利用安装在除草机械上的摄像头获取田间图像信息,通过图像处理算法识别出作物和杂草,进而驱动执行机构进行除草作业。在此方面,已有大量产品问世,除了一些实验室的概念产品外,也有部分公司开发了实用的市场化田间作业装备。德国某公司研发的CULTICAM除草机立体摄像机通过双镜头实现作物的三维信息采集,利用空间轮廓识别杂草丛(见图2)。美国某公司致力于利用计算机视觉技术识别作物是否需要喷洒农药或除草剂,之后由机器人进行相应施药作业,为农民提供一种控制和预防杂草的新方法。全球某农机巨头和法国某公司联合研制的AutoTrac Implement Guidance能够精确导引除草机在植株间行进,而无需铺设移动架。德国某公司的电动式除草装置,除了搭载基于机器视觉的杂草识别系统外,在末端执行机构上采用指状簧齿结构,在除草的同时还能从根系区域向上粉碎土壤。图3所示的除草机器人能够实现莴苣、洋葱等苗间的精准除草。

图2 CULTICAM 除草机立体摄像机
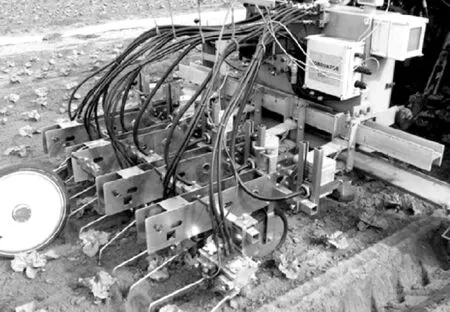
图3 除草机器人
国内各高校及科研院所针对作物行识别、作物识别、避障机构等开展了大量的理论与试验研究。南京农业大学葛艳艳等[5]基于优化的Hough变换进行作物行的检测,并基于机器视觉进行了中耕除草机的研制。东北农业大学韩豹等[6]提出了基于超声波测距的苗间机械除草部件入土深度控制方法。胡炼等[7]基于2G-R-B提出了作物识别与定位方法,该方法能够正确识别作物并提供准确的定位信息,适应不同天气不同种类的作物,做到棉苗正确识别率为95.8%和生菜苗正确识别率为100%。陈子文等[8]提出采用里程信息和视觉信息融合的刀苗距优化方法,设计了基于C8051F020单片机的刀苗距优化系统。贾洪雷等[9]基于除草执行部件间歇式旋转运动的思想,设计了一种针对中耕期玉米田间使用的避苗除草装置,该装置平均除草率达94.7%。陈学深等[10]针对水田作业环境设计了对行液压控制系统,实现对除草部件作业路径的避苗控制。王刚等[11]设计试验了触碰定位式玉米行间除草装置,能够定位并躲避玉米秧苗位置。但是这些研究成果目前大多处于实验室或者小范围试验阶段,还未进行大面积示范或应用。
1.3 变量施肥技术与装备
变量施肥技术作为精准农业的关键组成部分,能够按照不同地块的养分水平进行不同肥料量的合理施用,提高肥料利用率并降低环境污染,目前主要的变量施肥技术包括基于处方图和传感器技术两种。国外基于处方图施肥的技术在各大农场已得到广泛应用,随着实时传感技术的进步,基于传感器的变量施肥技术逐渐发展起来。德国某公司的Crop Sensor以及美国某公司的Greenseeker均采用近红外光谱分析技术,根据植物叶子对近红外和红光吸收和反射特性的区别,通过测量反射光线的类型和强度对作物生长进行评测,间接实现土壤中有效氮肥量的采集。英国某公司的HemiView数字植物冠层分析系统(图4)通过处理影像数据文件来获取与冠层结构有关的辐射数据,进而得到冠层的光线覆盖状况及直射与漫射光的分布等。另外,在线混肥技术也大幅改善了环境安全方面的一些问题,如意大利某公司的化肥在线混配系统,该模块化预混系统安装在泵下游的喷雾器上,减少了操作者受污染的风险。
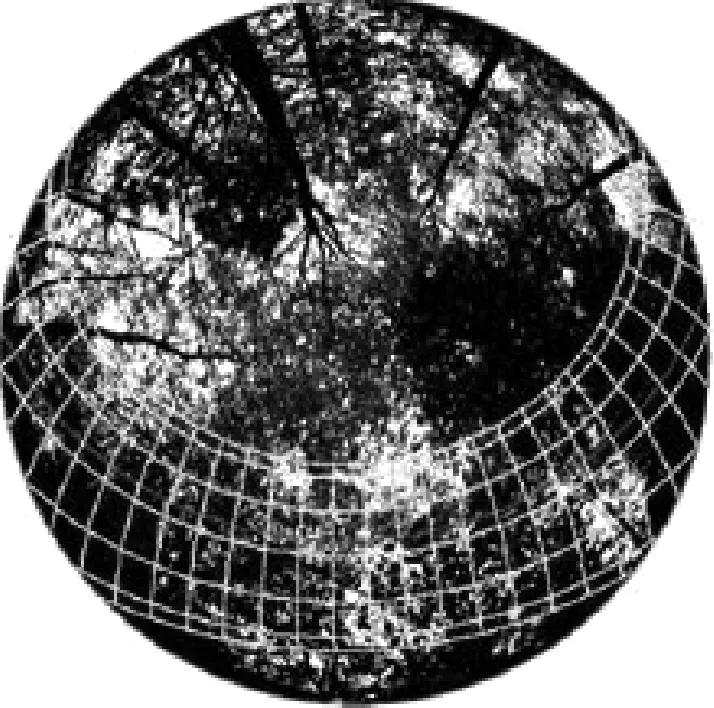
图4 HemiView数字植物冠层分析系统
国内很多高校在基于处方图和实时传感器技术方面积累了大量的变量施肥作业经验,且施肥准确度可高达90%以上。陈满等[12]设计了基于多传感器的变量施肥控制系统实现田间精准变量施肥。金鑫等[13]基于CAN总线通信协议下的车载传感器与PIC控制融合技术,设计了2BFJ-24型小麦精量播种变量施肥机,实现变量施肥准确率高达96%。余洪锋等[14]提出了一种简单实用的变量施肥方案,实现多种肥料按需配比、同一田块均匀施肥、不同田块变量施肥的功能。李欣倪等[15]基于Android平台设计了一款包含施肥监控APP和施肥执行控制器的变量施肥控制系统,其排肥精确度的准确率为94.65%。河南农业大学袁玲合[16]设计了一种三轮高地隙中耕精量施肥机,采用电液比例控制技术,实现对施肥量的精确控制。东北农业大学李沐桐[17]设计了一种玉米苗期精准穴施肥机构,当靠苗装置与玉米植株接触时,位移摆杆激活微力放大器通过离合装置带动边侧施肥机构开始扎穴,完成施肥作业。国家农业信息技术研究中心研制的精准变量旋耕施肥机,主要基于田间处方图进行变量作业;吉林大学也研制了2BDB-6大豆变量施肥播种机,但目前还未实现产业化推广与应用。
1.4 精准施药技术与装备
喷雾机领域一直是欧洲农机公司的强项,他们注重研究药剂在叶片上的沉积和分布规律[18]、药剂使用对水体及人类健康的危害[19]等,通过农药的减施和精准施用来确保对生态的最小危害。目前在喷雾机上已经广泛应用了喷杆高度自调整技术,同时作业参数在线监测系统已经成为各主流喷雾机的标准配置。德国、法国等国家大型植保公司的植保机全部采用电子调控系统,控制喷杆伸缩、喷洒、压力流速、单位面积喷洒量等各种作业参数。德国某公司的Primus系列牵引式喷雾机通过电脑控制终端实现全自动控制设定,全程显示每公顷喷药量、已喷量、喷雾压力、行驶速度以及已喷药的面积等。除此之外,国外公司在减少药液漂移方面也做了大量工作。丹麦某公司的风幕式大型喷雾机舵手Master1000(图5)采用“双风”风幕的喷杆型式,使雾滴附着于目标表面避免飘移,从而让雾滴在杂草上高效吸收,同时小雾滴实现更好的叶面覆盖能力。德国公司的UF 1501型液压打药机基于喷头控制斜面高度技术,可以实现每个喷头根据其特征获得不同的工作高度,时刻保持被喷洒试剂的最佳分布及减少漂移,在25 km/h作业速度下依旧性能优秀。德国企业采用的自动调节喷头组件斜面高度技术,通过自动斜面高度调节功能和喷头自动旋转功能的结合,使喷雾机工作在距离目标作物的最佳高度处。

图5 丹麦某公司的风幕式大型喷雾机
国内在雾滴分布和飘移方面也做了大量工作,但主要集中在理论研究方面。王潇楠[20]从影响雾滴飘移的因素入手,系统研究分析了雾滴粒径、雾滴运动速度、助剂溶液特性、施药机具等因素对雾滴飘移的影响,建立了雾滴飘移能量模型。曹军琳等[21]采用超红算子2R-G-B与OTSU算法结合的图像处理方法,研究叶片表面形态特征、雾滴粒径和叶片倾角3因素对雾滴沉积分布的影响。张慧春等[22]通过研究发现喷雾角、雾滴速度、流量、植物类型等参数对植物、地面和大气等不同部分农药分配比例的影响不大,而雾滴粒径、喷头高度、风速、植物生长阶段对植物、地面和大气等不同部分农药分配比例的影响显著。吕晓兰等[23]指出喷雾压力对雾滴沉积无明显影响,减小行驶速度可增加枝叶正反面雾滴的沉积,增大风机出口风速可有效增加雾滴在枝叶反面的沉积;各喷雾技术参数均对冠层内的雾滴沉积覆盖率有显著性影响,其影响程度由强到弱依次为采样高度、行驶速度、风机出口风速、喷雾压力。喷雾机上的智能化提升手段还未完全成熟,根据机具作业速度进行变量作业的喷雾机有一定的市场,但还有待进一步推广应用。
2 山东省田间管理装备发展存在问题及发展趋势
田间管理环节机械化水平较低。在我国主粮和经济作物生产中,普遍存在“重种轻养”的思想,整地、播种和收获的机械化水平较高,2018年山东省主要农作物耕种收综合机械化率超过86.53%,高出全国平均水平近20个百分点;田间管理环节的农机装备仍存在有效供给不足、门类不全和中低端产品产能过剩并存的问题,中耕、追肥、除草、植保等机械化率较低,部分机械甚至为空白。
2.1 山东省田间管理装备发展存在的问题
2.1.1 肥药施用过量
我国自20世纪90年代开始大量施用化肥,2015年全国化肥总用量超过5 400万t,是全球平均用量的3.4倍、美国的3.4倍、非洲的27倍。作为我国粮食、蔬菜和水果的重要产地之一,山东省2018年的化肥施用量达420.35万t,高居全国第二位。从化肥施用强度来看,2016年全国平均化肥施用强度为359.1 kg/hm2,农药施用强度10.4 kg/hm2;而山东省早在1995年化肥施用强度达到362.3 kg/hm2。化肥农药的高强度施用对山东省土壤和生态环境造成严重的负面影响,制约现代高效农业的健康可持续发展[24]。
2.1.2 高端植保装备缺乏
目前广大农户在病虫害防治过程使用的药械仍以背负式喷雾机为主,其防治面积达60%~70%,这些药械存在严重的“跑、冒、滴、漏”现象。大型喷杆式喷雾机虽然产品功能与设计上已较成熟,但装备智能化程度低,精确感知与精准作业能力差,喷施过程中农药分布不均匀,导致农药施用过量,从而致使土壤重金属含量超标,对山东省食品安全提出了新的挑战[25]。
2.1.3 农机资源未得到高效利用
由于受到土地经营模式、地势样貌、农作物生产规模等限制,农业生产仍然存在生产规模小,不同地区的气候条件、种植习惯存在差异,部分地区大型农业机械难以规模化作业而小型农机功能单一等问题。自然因素、生产规模和种植习惯上的复杂性使得“无机可用”与“有机不能用”并存,大量功能相似的单功能专用机具重复设计,农机的设计、生产、管理资源未得到高效利用。
2.2 山东省田间管理装备发展趋势
现代高效农业背景下,环境友好和资源节约是田间管理技术与装备发展需要考虑的两个现实问题,其关键在于实现肥药资源的精准供给和农机资源高效利用。因此,在田间管理全环节的关键基础理论和核心技术突破基础上,通过“以机代药”和智能化技术实现田间管理环节的精确感知、精准作业、智能管控;通过模块化设计实现田间管理装备设计、生产、使用、退役全过程的高质高效;并进一步结合现代传感、物联网等先进技术手段将田间管理装备作业过程纳入到智能农业互联网平台,构建全新高可靠农机大数据,从而实现全农艺环节的高质高效,是应对当前山东省现代高效农业模式下田间管理装备发展的有效对策。
2.2.1 基于模块化设计的田间管理装备研发模式
通过装备设计模式的创新实现由传统的“专机专用”“一机多用”向“一机N用”转变,实现田间管理装备设计、生产、使用、退役全过程的高质高效。基于模块化设计的田间管理装备研发模式(图6)。
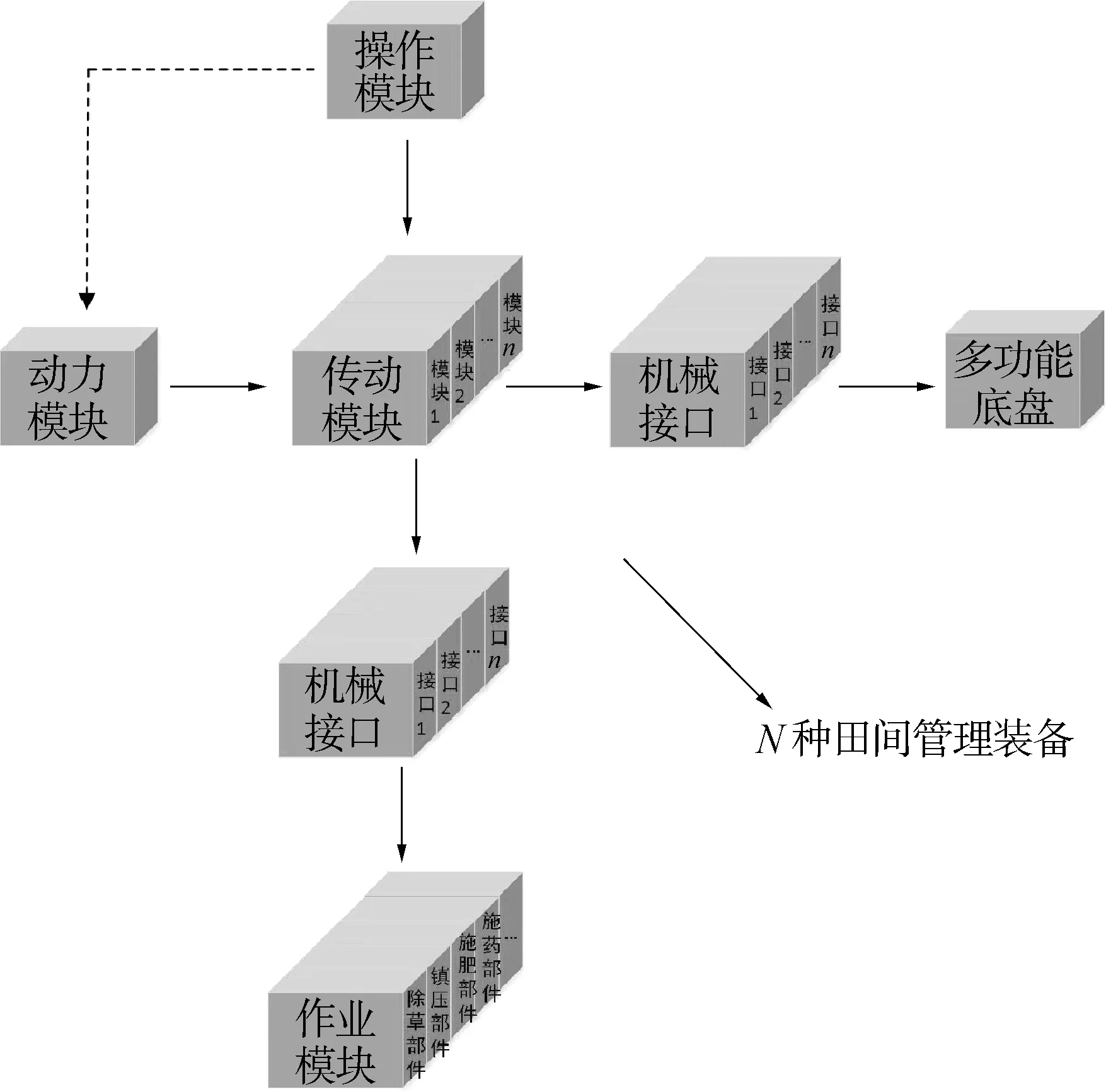
图6 田间管理装备模块化设计示意图
通过对田间管理作业装备的“拆解—重构”,实现“按需组装”,解决传统专机专用模式带来的农机利用率低以及重复设计问题,以及传统片面追求多功能化带来的机械主体部分笨重复杂、制造成本高、可靠性低、价格昂贵、功能冗余,以及农民对功能需求与价格需求矛盾问题。同时有助于扩大生产批量和降低制造成本,提高设计效率、生产效率、装备利用率,有助于产品的售后服务、维修和产品的多样化及更新换代,实现农机装备的回收再利用,节本增效。
2.2.2 基础理论和核心技术突破
在田间管理技术与装备领域,虽然已进行了一些基础理论研究;但欧美国家一直致力研究的各种减药省药理论,包括防飘移理论、雾滴最佳大小及均匀性相关理论等还未突破。同时,部分理论研究成果也未得到合理运用,如雾滴在叶片上的沉积规律还未完全用于提高雾滴在叶片正反面的沉积率。除此之外,一些制约装备发展与提升的技术还亟待突破。如为了减少操作人员接触农药发生中毒事故,在线自动混药技术的研究与应用将大幅降低施药作业人员的伤亡率;采取药液回收循环技术可将飘移或散失在非作物上的部分药液进行回收再利用,一方面提高农药利用率,另一方面减少对人体和动物等的伤害;智能行间除草技术的应用能够最大限度的降低作业时的人为误差因素,提高作业效率。
2.2.3 精确感知、精准作业与智能管控
基于智能化的精确感知与精准控制技术是实现节肥、节药的有效手段。为所有作业装备配备控制屏,控制屏通过总线技术可与多种型号的拖拉机相连,实现机具作业过程智能控制。驾驶员不仅能够实时了解机具作业状态,及时排除机具故障,还可以利用实时传感信息进行作业。融合测速传感器、测距传感器、压力传感器等信号,为喷雾量的自适应调节提供依据;基于压力传感器、流量传感器等信号,对肥药在线实时配混状态进行监测与控制;融合多传感器技术,对机具作业状态、累计作业面积、异常状态等进行监测与调整,实现智慧田间管理作业。
2.2.4 云服务平台接入与农机大数据构建
运用现代传感、物联网、信息化技术实现农机从机械化到智能化的跨越,将田间管理过程的除草、施肥、施药等环节涉及的作业监控、定位跟踪、运维管理等纳入智能农业互联网平台,借助5G传输技术构建全新高可靠农机大数据。基于平台信息,可实现农机信息、位置跟踪信息、作业过程监控信息等的实时获取;进行农机作业任务申请、作业计划发布、作业进度查询等任务发布与管理;储存的机具作业信息可供多级监管部门进行作业质量监督与作业补贴发放,为管理部门和用户提供一条龙无障碍服务;土壤养分信息和作物冠层信息及产量数据可为后续变量播种施肥提供决策支持。
3 结论
立足山东省现代高效农业发展,在总结国内外田间管理主要环节装备研发现状基础上,指出肥药资源的精准供给和农机资源的高效利用是山东省高效农业模式下田间管理装备发展面临的两大关键问题,进一步提出了山东省高效农业模式下田间管理装备的发展对策。
1) 提出基于模块化设计的田间管理装备研发模式。通过对田间管理作业装备的“拆解—重构”,实现“按需组装”,可解决传统专机专用模式带来的农机利用率低以及重复设计问题,创新实现农机装备全生命周期的高效利用。
2) 通过“以机代药”和智能化技术实现基本增效。田间管理环节的精确感知、精准作业、智能管控。进一步突破田间管理全环节的关键基础理论和核心技术,通过机械除草技术和智能化技术实现精确感知作物需求,进而智能管控作业过程、精准施用肥药资源,在保证农艺需求的条件下减少资源浪费,实现节本增效。
3) 田间管理全环节信息纳入智能农业互联网云平台,构建农机大数据。进一步结合现代传感、物联网等先进技术手段将田间管理装备作业过程纳入到智能农业互联网平台,实时获取和监管作业过程;构建全新高可靠农机大数据,为作物生长提供决策支持,从而实现全农艺环节的高质高效。
