电机脉动电流抑制方法的研究
2021-02-22冉正云
冉正云
(广东美的暖通设备有限公司,广东 佛山528000)
1 概述
三相二极管整流的变频调速系统中,母线电压存在纹波,纹波电压与变频输出的主频电压叠加,导致电机电流存在脉动,在重载运行时存在过流风险。理论上,电流脉动可以在PWM 调制时对母线电压进行滤波处理来抑制,实际中由于母线电压采样存在延时滞后,以及中断程序运行时间不确定,脉动电流很难从根本消除。文献[1]分析了死区时间对三相SPWM 逆变器直流母线纹波电流的影响,但没有进行脉动电流抑制。文献[2]找出永磁同步电机定位转矩中幅值较大的基波和主要谐波分量,通过注入补偿电流产生的转矩抵消定位转矩中的基波与二次谐波分量,从而达到抑制永磁同步电机转矩脉动。这种方法需要离线找到脉动电流成分,然后在线注入补偿电流,工作量大,且自适应较差。文献[3]仅考虑了电流测量误差引起的脉动。文献[4]解决了压缩机处于变工况运行时的电流脉动问题,没有解决稳定运行时的电流脉动。文献[5]基于混合控制集预测控制的电流脉动抑制,算法复杂,电流脉动抑制效果一般。
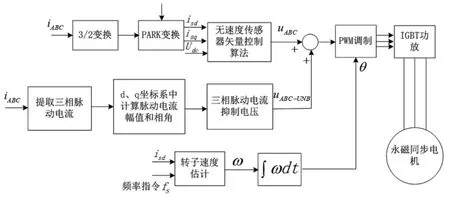
图1 电机电流不平衡补偿框图
本文根据采样到的三相电机电流,在d、q 坐标系中滤掉脉动成分,剩下主频信号的d、q 分量,计算出主频信号的三相平均电流,进而提取出三相脉动电流。在d、q 坐标系中,计算出脉动电流幅值和旋转角,按抑制步长进行平滑抑制。
2 原理与设计
图1 为电机电流不平衡补偿示意图,由无速度传感器矢量控制算法模块、电流脉动抑制算法模块构成。电流不平衡补偿算法包括提取三相脉动电流,d、q 坐标系中计算脉动电流幅值和相角、三相脉动电流抑制电压组成。
电机三相电流IA,IB,IC 经CLARKE
变换为:

ISα、ISβ电流经PARK 变换为:

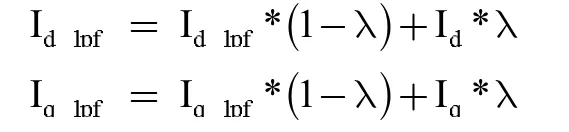
d、q 轴电流Id、Iq经低通滤波后得到:
三相平均值电流分别为:

提取的三相脉动电流分别为:

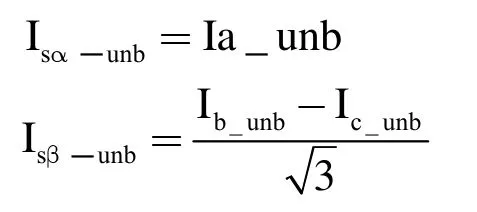
三相脉动电流经CLARKE 变换为:
脉动电流幅值为:
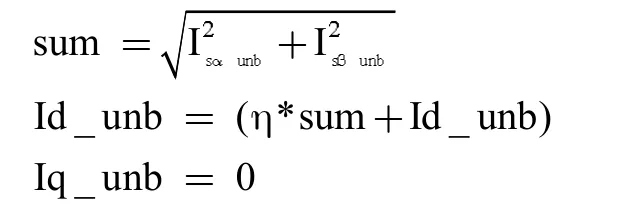
式中,η 为脉动电流补偿步长。
PARK 逆变换旋转角gama 为:
脉动电流变换到αβ 坐标系:

脉动电流变换到A,B,C:
三相抑制电压分别为:
式中的μ 为抑制系数。
3 仿真与实验
搭建永磁同步无速度传感器矢量MATLAB 仿真模型,电机参数为:1 对极,额定功率160kW,额定频率283Hz,额定电流330A,最大电流360A,L=Ld=Lq=0.15mH,反电势系数为23.4V/krpm。在CLARKE 逆变换生成的UA、UB、UC 分别加上50ωLcos(θ),50ωLcos(θ-2π/3),50ωLcos(θ+2π/3),ω和θ 分别为25Hz 低频正弦信号的角速度和旋转角,以此产生25Hz 的三相低频脉动电流。图2 为运行在满载时的电流波形,脉动频率为25Hz,基波电流中叠加了低频脉动波,在额定负载或过载的情况下,脉动电流极易触发过流点,导致变频驱动器停机。脉动抑制算法中,λ 和μ 分别取为0.01 和1。图3 为脉动抑制后的电流波形。
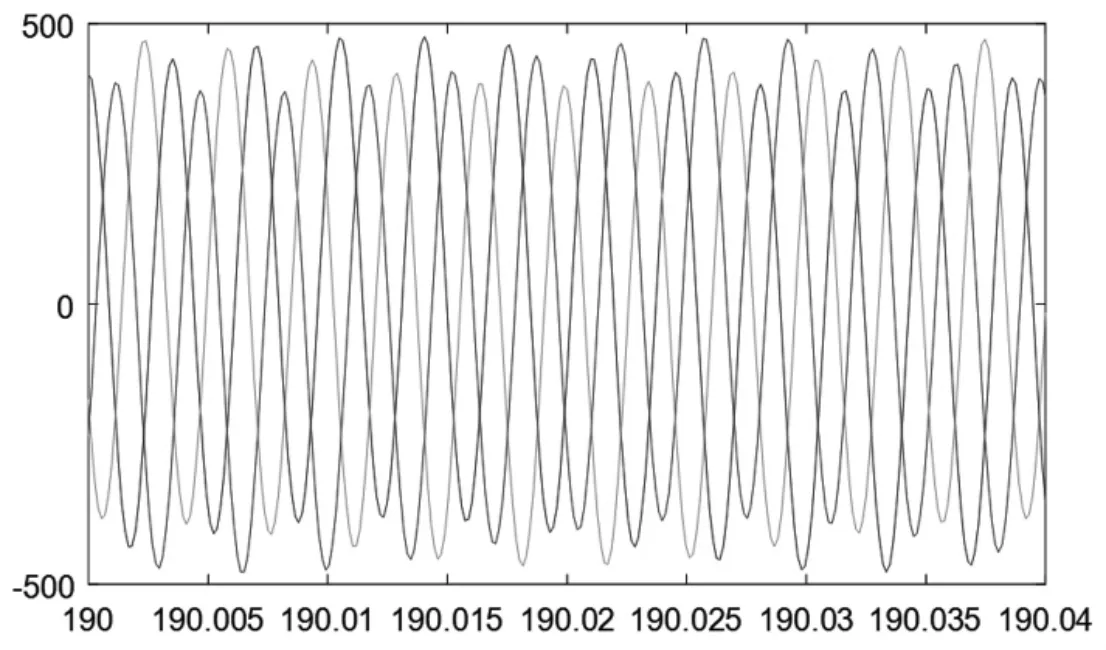
图2 脉动抑制前的电流波形

图3 脉动抑制后的电流波形
实验所用永磁同步电机额定参数和控制参数λ、μ与仿真模型相同。
运行在频率295Hz、电流有效值为330A 的工况。图4 为脉动抑制前的电流波形,脉动频率为4.9Hz,脉动幅值较大,负载电流越大,脉动幅值也越大。图5 为脉动抑制后的实验波形,经脉动抑制后,脉动幅值趋近于0,取得了较好的抑制效果。
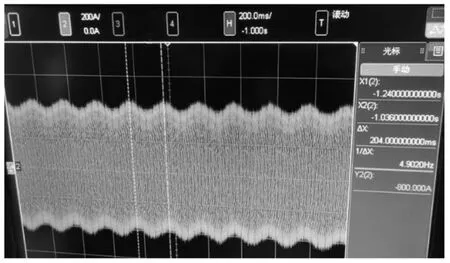
图4 脉动电流抑制前的实验波形

图5 脉动电流抑制后的实验波形
4 结束语
本文针对电机电流脉动问题,精确地提取了三相电流脉动成分,并进行有效抑制,不会在重载时由于电流脉动出现过流情况,提高了系统的可靠性,在没有增加硬件成本的同时延长了IGBT 使用寿命,降低了永磁同步电机退磁风险,适合变频驱动系统高可靠性应用场合。
