一种全自动除雪机器人设计
2021-02-22潘江如甄世婵
何 龙,潘江如,张 成,甄世婵,李 潇
(新疆工程学院 机电工程学院,乌鲁木齐 831200)
0 引言
我国国土辽阔,由于纬度因素影响,北方的冬季一般会持续3~5个月,部分地区冬季持续时间更长。每当下雪季,道路积雪会严重影响出行安全和交通运输,交通事故频发[1]。
我国现有的冬季常用除雪方式主要包括人工扫雪、化学融雪和机械除雪这三类[2]。人工扫雪除雪速度慢,费时费力,劳动强度大,在除雪时间上,通常受到诸多因素的限制,不能及时有效地除雪,路面既要遇雪受冻又要被除雪工具敲凿,极大的缩短了道路的使用寿命;化学融雪除雪法是运用氯化物融雪剂降低雪的融点,化雪成水,以实现除雪的目的,但化学试剂会造成路面腐蚀,极大地减小道路的使用寿命,并且在使用化学药剂化雪成水的过程中,融雪剂中的化学物质会随雪水进入到自然环境中去,当这些化学物质在自然环境中超过一定量时,就会导致土壤盐化盐害,造成植物受损严重枯死,甚至会使动物病害死亡,极易造成污染环境。
机械除雪法则是我国目前使用最普遍的一种除雪方法。但是我国除雪机械的研制起步发展较晚,市场上现有的除雪机械从适用范围上主要分为两类:大型扫雪车和小型除雪机。大型扫雪车主要适用于交通运输路线的积雪清扫,由于设计体积大,只能在宽阔道路上使用,不能在其狭小道路作业,较为典型的是汇强重工生产的HQC GS-5000大功率超宽全钢丝滚刷系列,每次扫雪宽度在4~5米,这类除雪车只能适用于交通运输干线的路面清雪工作,而随着近年来我国城市化的不断发展,城区面积的逐步扩大,对于小型除雪机的依赖增多,大型扫雪车应用范围单一,不能广泛推广应用;小型除雪机则主要用于人行道、公园小道、学校等狭窄道路场所的除雪作业,然而市面上现有的小型除雪机以手推式为主,智能化、自动化水平低,结构复杂,在进行除雪作业时,普遍需要人工辅助进行积雪的清扫,浪费大量的人力物力资源,费时费力,且除雪效率低,除雪效果差,综合性能较差[3-5]。

图1 除雪机器人系统结构设计图
针对上述小型除雪机存在的除雪效率低、应用范围小、不能全自动化作业等问题,设计一种全自动除雪机器人,采用计算机控制,实现除雪机器人的全自动路线规划和导航扫雪,利用网络RTK实时动态差分定位技术可以达到对除雪机器人5个厘米以内的高精度定位,有效的防止重扫、漏扫现象的出现,极大地提高了除雪效率,使冬季除雪作业更加快捷化、全自动化和智能化,对未来我国的小型扫雪机械向更加智能化的方向发展具有极其重要的推动作用。
1 机器人系统结构设计及原理
一种新型全自动除雪机器人设计主要由控制系统、除雪系统和行走系统三部分组成。除雪机器人工作时,控制系统与运动系统结合,通过控制系统中的网络RTK实时差分定位模块、无线数传等技术手段实现机器人的全自动路线规划导航,除雪系统在运动系统的带动下,通过控制系统调节除雪系统中的电机转速,将收集的积雪喷向道路两旁。在整个除雪机器人系统装置的设计中,行走系统和除雪系统是硬件基础,控制系统是软件控制核心,控制系统由2.4 GHz发射机、4 G通讯模块、数据传输传天线、接收机、计算机、主控控制模块、惯性导航模块、网络RTK实时动态差分定位模块、地面站、定位天线、测向天线、电子调速器12个主要单元组成,通过这12个单元的协同工作,实现了除雪机器人的全自动路线规划和导航除雪[6]。除雪系统由连接支架、敛雪装置、扫雪转筒、喷雪口和无刷电机组成,通过三维建模对除雪系统的机械结构进行了系统的设计与优化,依靠除雪系统可以完成高效快速的除雪工作;行走系统运用双履带式结构作为行走系统,其包括支撑骨架、主动轮、诱导轮和电机等机构,可以实现机器人在除雪作业全过程中的全自动运动行进。一种全自动除雪机器人系统设计图如图1所示。
工作原理:在除雪机器人作业过程中,当机器人开机自动完成自检工作后,控制系统首先会通过GPS定位天线和网络RTK实时动态差分模块的共同作用,精确获取机器人的位置信息,控制器自动解读定位信息确定除雪机器人的地理位置,地面站会实时监测显示当前除雪机器人位置,同时显示扫雪机器人定位的卫星数量、扫雪机器人速度、信号质量、经度、纬度、电池电压等信息。操作者可以通过地面站上的云地图设置除雪区域和路线,或者通过计算机自主识别规划行进路线,地面站将这些信息通过数据传输天线和4G通讯模块的配合,传输给除雪机器人上的数据接收模块,当数据接收模块接受到信息时,会通过计算机的数据解码运算将信息传输给主控制模块,主控制模块会根据信息向电子调速器发出指令,电子调速器的两个输出端口分别与行走系统中的电机和除雪系统中的无刷电机连接,电子调速器控制电机转动,以控制机器人的行进系统按指定路线行进和除雪系统进行除雪工作,在三者的共同协调作用下,完成积雪的清扫。
在控制系统的设计中,定位天线实时动态定位除雪机器人的位置,调整除雪路线,测向天线为机器人实时确定方向。控制系统会时刻根据除雪机器人的位置变化,控制器通过电子调速器,调节PWM值改变除雪系统上无刷电机的转速,调节产生离心力的大小来控制除雪滚筒喷射积雪的距离,使收拢的积雪可以有效的清除到道路两侧[7]。控制系统中的惯性导航模块,提高了控制系统的稳定性和可靠性,使除雪机器人在冬季复杂的天气环境下能够有效地工作;同时网络RTK实时差分定位模块通过除雪机器人、地面站和卫星三者间的数据传输可以实现对除雪机器人在5厘米以内的高精度定位,可以有效地防止重扫,漏扫现象的出现,使除雪机器人的除雪作业效率大大提升。在实现自动化控制的基础上,设计了“超声波+红外线”的复合避障系统,通过超声波和红外线的安装,确保了对障碍物检测的可靠性和准确性,极大地降低了单纯用超声波进行检测的误判,使除雪机器人的安全性能进一步提升[8]。
在整个除雪机器人的系统设计中以控制系统的设计为核心,通过控制系统驱动行走部分运行,除雪系统实现除雪作业任务。
2 系统硬件设计
2.1 设计思路
一种全自动除雪机器人设计主要从以下几个设计理念出发。
1)小型化:
随着社会现代化的不断发展,城市化的发展速度快速提高,城市群逐渐增多,城区面积逐步扩大[9]。冬季城市道路的清雪对于除雪机的需求也将会增多,而大型的除雪机械已经不能适应城市化的发展,相反小型化的除雪机械更能满足市场需求。现今扫雪机械的发展与应用已经较为普遍,但是我国大部分的人行道、街道、小型广场、公园、社区等区域内的积雪都是依靠环卫工人进行清除工作的,因此加大对小型除雪机的研制,提高其适应范围,对于冬季的城区道路清雪作业具有重要的意义。
2)全自动化控制+自动避障:
市面上现有的小型除雪机以手推式为主,智能化、自动化水平低,工作效率慢,结构复杂,综合性能较差,大多依靠人工辅助进行半自动除雪作业,除雪效率低,浪费人力物力。针对目前存在的这些问题,设计一种新型全自动除雪机器人,通过计算机控制实现除雪机器人的全自动路线规划和导航除雪,使除雪作业实现了全自动化工作。此外在除雪机器人运动系统的前端安装了“超声波+红外线”的复合避障系统,在清扫积雪时避免碰撞到行人和路面障碍物,使除雪机器人的设计更加智能化和人性化[10]。
3)一车多用:
现在国内外设计的小型除雪机械普遍是功能单一型的,只能用于冬季的除雪作业。因此设计一种新型全自动除雪机器人,其除雪系统和行走系统之间通过连接支架实现固定连接,两者之间是可以拆卸的。在冬天的下雪季,在机器人前端安装除雪系统可以完成除雪工作,而在非除雪期,可以在机器人的前端安装其他装置如割草装置、吸尘装置等,只需通过控制系统的重新编程,完成新装置的功能需求,就能够实现一车多用的功能[11],极大的提高了机器人的利用率,节约了购买成本。
根据上述设计思路,设计了一种新型全自动扫雪机器人,其整体设计三维UG建模图如图2所示。

图2 一种全自动除雪机器人三维建模图
机器人的整体设计是:控制系统位于除雪机器人的顶部,进行数据的搜集和处理,控制行走系统和除雪系统共同完成除雪作业;动力系统和行走系统是一体化设计的,动力系统位于行走系统即除雪机器人的底板上,为机器人工作提供动能;除雪系统处于在除雪机器人的前端,完成除雪任务。在进行除雪工作时,通过这四者协调工作,实现机器人的全自动除雪作业。
2.2 硬件机构的设计
一种全自动除雪机器人的硬件设计主要包括除雪系统的设计和行走系统的设计两部分。
1)除雪系统:除雪系统由敛雪装置、扫雪转筒、喷雪口和无刷电机4部分组成,喷雪系统通过连接支架与运动系统相连接,当需要将机器人用于其他作业时,只需更换除雪系统即可。除雪系统的三维模型设计如图3所示。最外侧的敛雪装置是模仿推雪式除雪机工作原理,敛雪装置的设计是由两个呈150°角度张开的推雪挡板组成,机器人在除雪行进的过程中,两侧采用具有一定倾角的推雪板装置设计,可以有效地提高积雪的收拢效率。敛雪装置的推雪板设计能根据扫雪路面的宽度进行的调整,以满足对除雪路面宽度的工作要求,达到最佳收拢积雪的效果和次数。当外部的敛雪装置将积雪收拢到内层扫雪转筒中时,无刷电机会带动扫雪转筒同步高速旋转,依靠转动时产生的离心力将积雪从喷雪口喷出,完成除雪工作,喷雪的距离则通过电子调速器来调节电机的转速,改变离心力的大小进行控制。当机器人定位在路面的不同位置时,控制系统会自动计算喷雪距离,向电子调速器发布指令驱动电机进行控制。除雪系统的外层敛雪装置类似于推板式除雪车机身前的推雪板设计,主要进行积雪的收拢,区别于现有的除雪刷,敛雪装置的设计在很大程度上降低了除雪机械在除雪时对道路的破坏,提高了积雪收拢的效率。

图3 除雪系统设计三维建模图
2)行走系统:在一种全自动除雪机器人的设计中,行走系统和动力系统采用一体化设计,行走系统采用双履带运行装置,包括支撑骨架、主动轮、诱导轮、电机、支重轮和传动装置等部分,动力系统安装在支撑骨架上,在一种全自动除雪机器人的模型设计中采用锂电池为机器人的工作提供动力。电机带动主动轮运动,并将动力传递到双履带结构支撑架的滚动轮上,同时在诱导轮、支重轮和传动装置的共同作用下,完成除雪机器人的行进作业。传统小型除雪机械基本采用轮胎作为行走机构,而冬季下雪路面光滑轮胎易打滑,影响除雪效率。因此除雪机器人设计运用双履带式结构作为行进装置,其优点是除雪机工作时增大了行走装置与路面的接触面积,除雪时的防滑效果和避障能力得到明显提升,可适应多种复杂地形的除雪作业,而且双履带式结构使机器人的转向半径变小,机器人转向和行进时的机动性更高,稳定性得到进一步优化,除雪效率明显提高。同时考虑到金属履带式结构对路面具有较大的破坏性,以及一种全自动除雪机器人的设计机身自重较小的原因,因此采用橡胶履带代替金属履带,既能满足工作要求又能减轻履带运动方式对路面的破坏程度。行走系统的双履带行进机构的设计如图4所示。
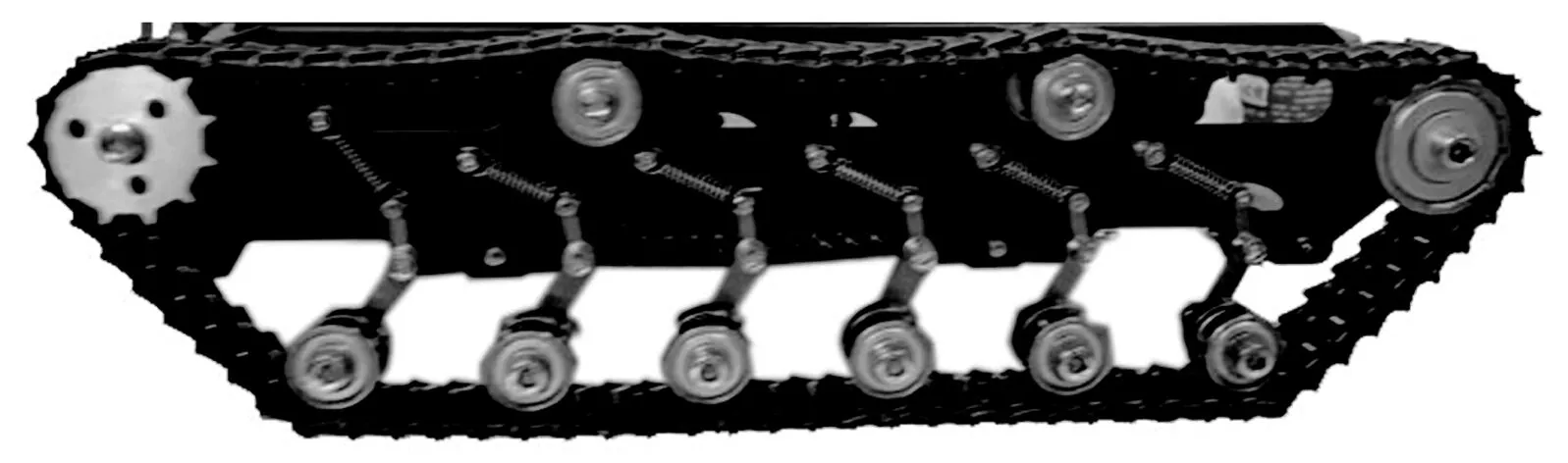
图4 双履带式行走机构
3 实验结果与分析
一种全自动除雪机器人装置的设计,通过三维建模和3D打印技术,制作出实物模型,并测得主要技术参数和在冬季道路工作状况下的数据信息。
3.1 数据参数
表1为本文全自动除雪机器人实物模型主要参数。
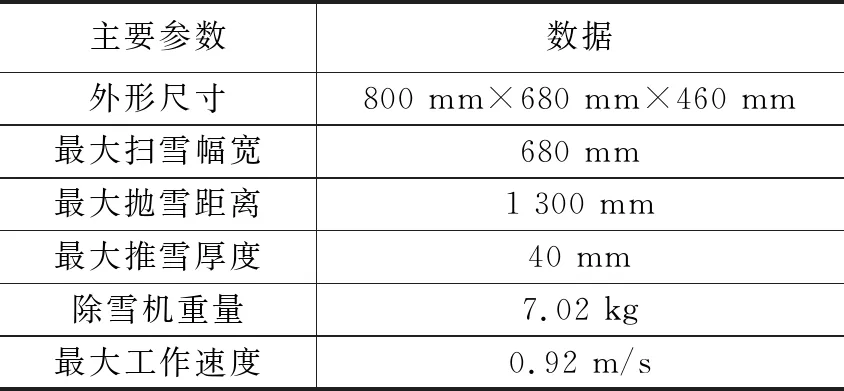
表1 全自动除雪机器人实物模型主要参数
根据表1各项数据参数,设计模拟计算得出该全自动除雪机器人实际生产制造和工作中的各项数据参数如表2所示。
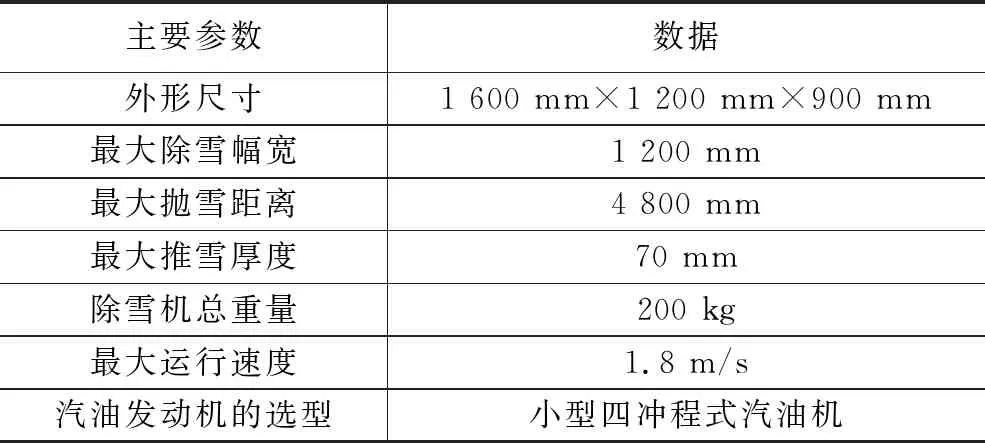
表2 全自动除雪机器人实际生产制造和工作中的各项数据参数
依照表2,设计参数的要求,已知在工作状态下,除雪机器人运行速度Vmax=1.8 m/s,最大除雪幅宽b=1.2 m,则除雪机器人每小时的工作效率为:
P=Vmax×b×T=7 776 m2/h
由知同类除雪机小型柳岸滚刷清雪无死角除雪机工作效率:
P0=5 000 m2/h
则与小型柳岸滚刷清雪无死角除雪机相比,一种新型全自动除雪机器人效率的提高率为:
通过模拟计算可知,一种全自动除雪机器人的工作效率将优于同类小型除雪机械产品,综合性能稳定。
3.2 运行效果
如图5、图6所示,分别为一种全自动除雪机器人实物模型路线规划图和工作状态图。通过对地面站信息分析和在工作状况下的除雪机器人信息的统计处理可知,除雪机器人的设计完全可以实现全自动的路线规划和自主除雪作业,达到对扫雪机器人5厘米以内的精度定位。除雪机器人作业时性能稳定,防滑效果好,避障精准,对地形的适应能力强,综上所述,本文全自动除雪机器人的综合性能优于同类小型除雪机产品。

图5 地面站除雪路况规划图

图6 除雪作业图
4 结束语
本文全自动除雪机器人设计主要为解决现有的除雪机不能实现自动除雪作业、狭窄道路积雪清扫,应用范围小等问题,通过对除雪机器人模型的构建和不断地实验验证现有以下结论:
1)除雪机器人可以实现自主路线规划和自动导航除雪作业,以及精准避障功能的除雪作业,与传统小型除雪机相比,除雪效率提高了55.52%;
2)采用双履带式运行结构设计,极大地提高了除雪机工作的稳定性,除雪机的防滑效果明显提升,可以适应于多种复杂路面的除雪工作;
3)利用网络RTK实时动态差分定位模块,实现了对除雪车5厘米以内的高精度定位,除雪作业时不会出现重扫和漏扫问题,与同类除雪机器人相比,除雪效率大大提高,综合性能优于现有小型除雪机械。
4)一种小型全自动除雪机的设计,其应用范围得到了极大的提高,可以适用于人行道、街道、小型广场、公园、社区、城区等区域路面的积雪清扫作业,同时为我国智能化、全自动化的小型除雪机械的研制提供了一种可行性设计方案。