LiDAR测绘新技术助力矿山生态环境修复
2021-02-21袁小勇欧阳亚
张 奇,袁小勇,甄 龙,易 祎,欧阳亚
(中国电力工程顾问集团中南电力设计院有限公司,湖北 武汉430071)
1 引言
近年来,全国各地逐步开展了多项矿山生态环境修复工程。如何快速准确获取矿山地形信息,为矿山修复工作开展提供基础数据支撑,已经成为当前需要迫切解决的关键问题之一。常规的人工测量手段,工作量大、作业时间长,并且存在一定安全隐患,传统的搭载可见光相机的无人机航摄技术,无法克服高密度植被影响,提供的数字高程模型精度较低。机载激光雷达测量(LightDetection And Ranging,LiDAR)是一种新兴的主动遥感测量技术[1,2],可以直接高效地获取高精度的地面高程信息,且不受天气影响,被广泛应用于测绘、林业应用等领域[3~5],其对植被具有很强的穿透能力,可以迅速、精准地探测到各类区域的地理数据信息[6~8],能够快速、直接、大范围地获取高精度的地表模型,在矿区生态修复工程中具有广阔的应用前景[9]。
2 LiDAR理论基础
激光雷达LiDAR是一种集激光、全球定位系统(GNSS)和惯性导航系统(INS)三种技术于一身的系统,用于获得点云数据并生成精确的数字化三维模型。它是一种主动航空遥感装置,是实现地面三维坐标和影像数据同步、快速、高精确获取,并快速、智能化实现地物三维实时、变化、真实形态特性再现的一种国际领先的测绘高新技术[10,11]。
由回波测距测量距离、POS系统测量飞机姿态和激光束扫描角度,即可以获得激光束在地面撞击点的三维坐标,同时结合扫描装置,即可获得反射物体的表面信息,现场采用的旋转正多面体扫描镜,相对于其它扫描仪来说具有扫描点均匀分布的优点,同时采用多次回波探测技术,可穿透乔木、灌木、草丛等植被直达地表,获取地面高程,特别适用于夏季高密度厚植被区域作业[12]。
3 LiDAR内外业一体数据处理流程
3.1 激光雷达及无人机设备
现场采用的高精度多平台激光雷达系统,可以直升机、无人机、车载、背包等作为运载测量平台。该系统搭载了长测距、高精度激光扫描仪,Riegl激光头,最大测程920 m,激光发射频率55万点/s,测量精度10 mm,具备多次回波探测技术;同时有效集成了高精度IMU、同步控制单元和高清相机,实现空中与陆地数据的无缝对接,能实时、快速地获取地形表面的三维空间信息和影像,具有集成度高、质量轻、数据精度高、多平台、快速拆装、方便携带等特点,能够大大提高外业作业效率[13]。
无人机设备采用大黄蜂四旋翼无人机,该无人机系统具有科学美观的结构设计,高度集成化的生产工艺以及全自动化的飞控系统,能保证高效且安全可靠的完成各种航飞任务。
3.2 飞行平台初始化与激光雷达检校
由于多平台激光雷达测量系统采用的是GNSS定位,在飞行数据采集前和数据采集后都需在设定的起飞点进行GNSS搜星和初始化定位。正常情况下为保证高精度数据采集要求,卫星数至少保证在14颗以上。
LiDAR经过长途运输或较长时间的连续作业后,需要对其进行检核校正。一般需要在城镇区域道路房屋密集位置,进行校核测量工作,测量改正数通过软件修正,同时利用变化航线对同一区域进行多次重复测量,校验测量相对精度。
飞行平台初始化与激光雷达检校完成之后,需要架设好地面基准站,采用静态作业模式,采样间隔设置为1 Hz,覆盖范围不超过3 km。
3.3 LiDAR航线设计
飞行数据采集前需提前了解测区的详细情况(包括周边建筑物高度、高压电力线分布及高度、大型通讯基站高度及位置等信息),航线设计起飞点应尽量选择测区中间,保证无人机在航飞数据采集过程中与遥控器通讯链路正常连接。
根据经验,LiDAR航测各项参数设置要求如下。
(1)航高:80~450 m,根据项目精度要求,合理设置航高。在保证安全前提下,精度要求越高,适当降低航高;精度要求越低,可适当提升航高。
(2)航速:6~14 m/s,不同比例尺的地形测量,对点云点密度要求不同,根据航高和激光点密度合适设置航速。
(3)航间距:80~300 m,根据项目精度要求和成果需求来设定,若只要求采集点云数据,可适当增大航间距,保证点云重叠率50%即可;若要求同时采集点云和影像数据,则以影像旁向重叠率(一般以60%为准)来确定航间距,此种情况适当降低航间距。
初始化完成后,飞手按照设定好的飞行航线进行飞行数据采集,采集过程中需时刻注意无人机的飞行姿态与高度,确保无人机飞行安全。
3.4 点云数据处理
3.4.1 POS数据融合解算
步骤如下:新建工程→原始数据转换→添加基准站、移动站原始数据→GNSS/INS解算→Combine→平滑处理→输出结果。
3.4.2 点云数据生成
将高精度POS文件及激光点云原始数据导入解算软件,设定项目对应的坐标系统参数及解算参数,解算出通用的LAS格式高精度激光点云数据。
3.4.3 点云数据分类处理
因为激光雷达系统接收的反射激光点包含多种信息(地面点、建筑物点、植被点、错误点等),因此需要对不同类型的点进行区分,从中提取出有用信息。
点云数据分类:首先进行整体去噪、滤波处理、分离低点;然后再进行地面点分类,分离出如房屋、树木、电杆、输电线路等地物;最后得到地面点云。因原始点云数量过多,不利于DEM的绘制,需根据需求对地面点云进行抽稀提取,得到合适密度的高程点,最后建立DEM模型,生成等高线(图1)。
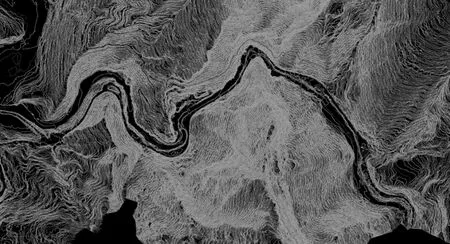
图1 生成的等高线
4 工程实例应用探讨与分析
4.1 工程概况
本次应用探讨以国内某矿区生态环境修复测量为依托,该项目共计253座矿山,零散分布在46 km2的范围内,矿区以开采锰矿为主,小部分开采重晶石矿。矿山断续开采已有近百年历史,开采方式主要采用露天开采。矿区内地形主要为陡崖,陡坎,斜坡等,有少量地物如房屋,500 kV、220 kV等高等级输电线路,10 kV、380 V等低等级输电线路、通讯线、道路、机械设备、坟、厂房、水塘、矿坑及碎石堆等。测绘植被覆盖率高达75%,种植有松树、桉树、杂树、经济林等,部分区域有水田和旱地,种植有经济作物水稻、玉米等;测区碎石林立、地形支离破碎极不完整,测区高差110 m,传统测量手段难以满足工期需求和测量精度需求(图2)。

图2 测区概略及LiDAR航线布设
4.2 LiDAR外业飞行及内业数据处理
本工程LiDAR外业飞行航高设置为110 m,飞行速度为10 m/s,共计作业4 d,累计飞行面积20 km2,飞行30个架次。经过内业数据处理,包括基站数据转换、POS数据融合解算、点云数据生成、点云数据去噪、滤波、分类等,得到矿区的数字高程模型(DEM)数据,叠加矿区的数字正射影像(DOM)后,生成成品数字线划图(DLG)文件(图3~7)。
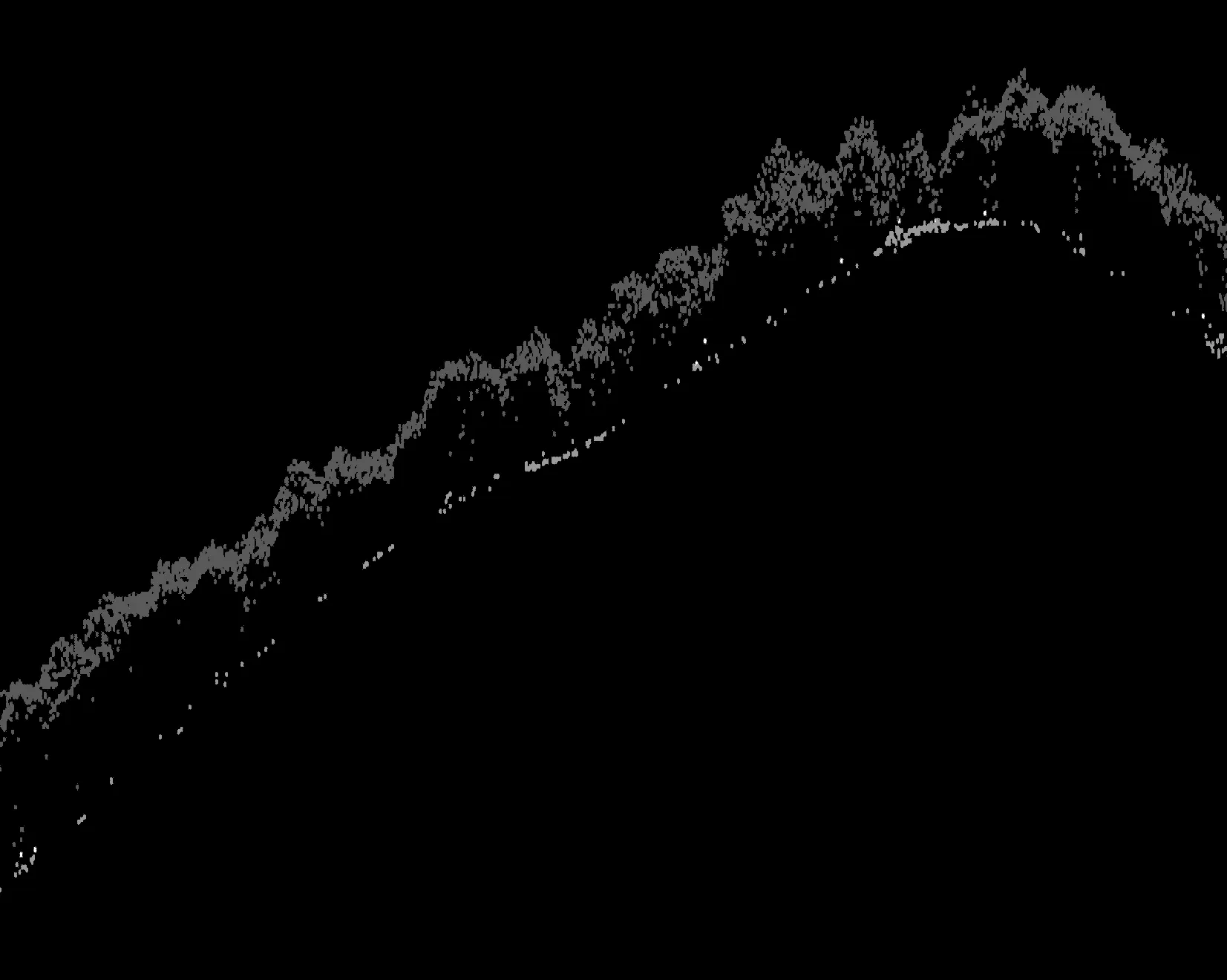
图3 植被穿透性(回波渲染)
4.3 LiDAR测量精度分析
为检测LiDAR的测量精度,现场在各个矿区随机选择抽检1300个GNSSRTK测量点,得到实测高程和点云高程的差值,高差平均值-0.037 m,差值最大值1.352 m,差值最小值-1.055 m,差值中误差±0.248。高差离散点分布情况如图8所示。
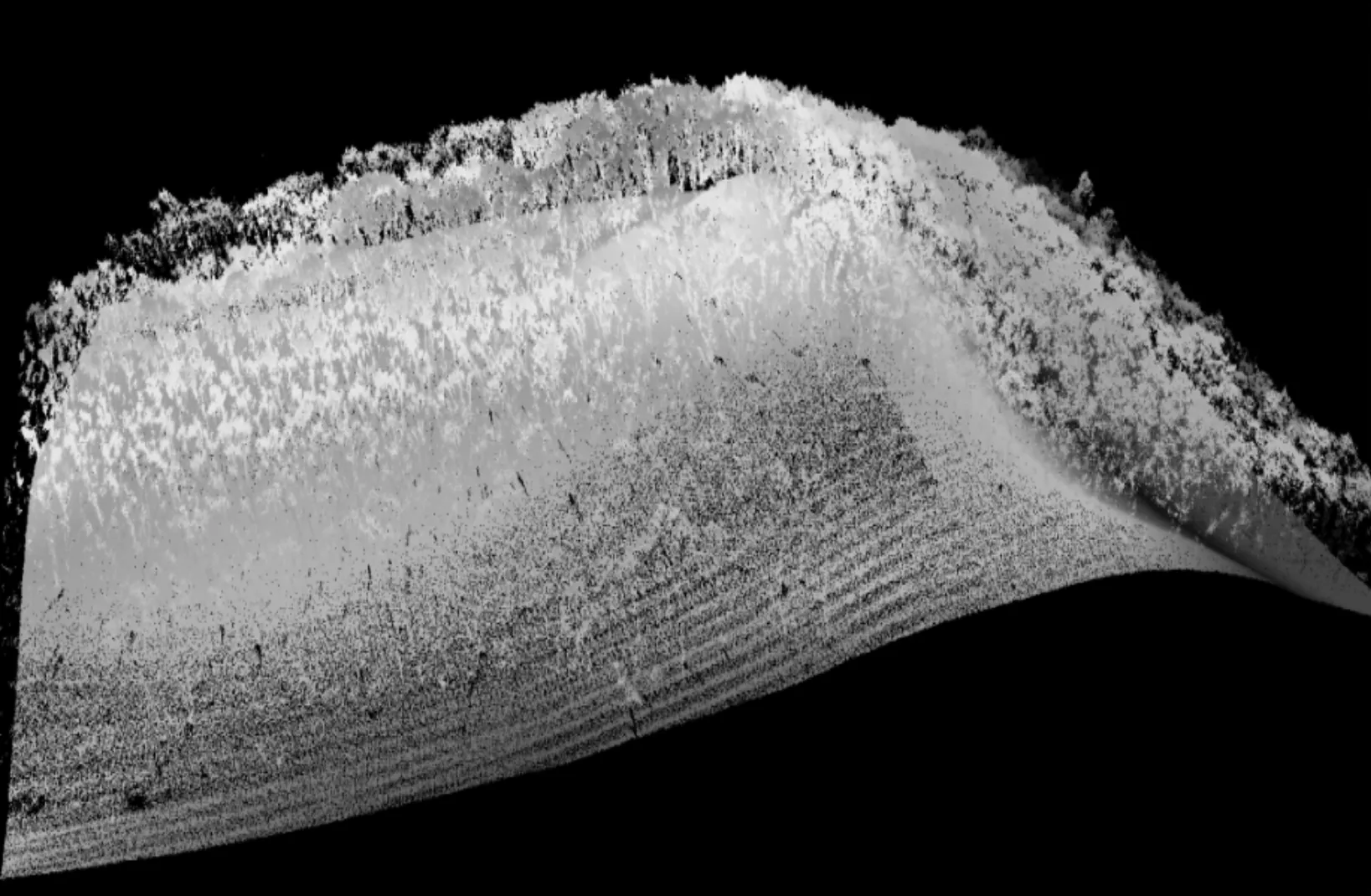
图4 植被覆盖区域穿透效果

图5 测区内A区域正射影像

图6 A区域对应的未进行分类的原始点云
从图8~10可以看出,GNSSRTK实测高程和点云高程的差值大多集中在-0.5~0.5 m区间范围之间,所占百分比为97%,其中-0.3~0.3 m分布区间占比达到90%,-0.1~0.1 m分布区间所占比超过50%,统计检测点高程中误差为0.25 m,远满足相关规范要求,说明此次LiDAR高程测量精度良好;同时,现场随机选择了一块区域进行GNSS RTK实测,分别用实测数据和点云数据计算挖填方土石方平衡,实测数据的土石方量为35223 m3,点云数据的土方石量为35018 m3,相差205 m3的土方量,误差为5.8‰,基本可以忽略不记,说明LiDAR高程测量精度完全可以满足矿区测量需要。

图7 A区域对应的分类之后的地面点云
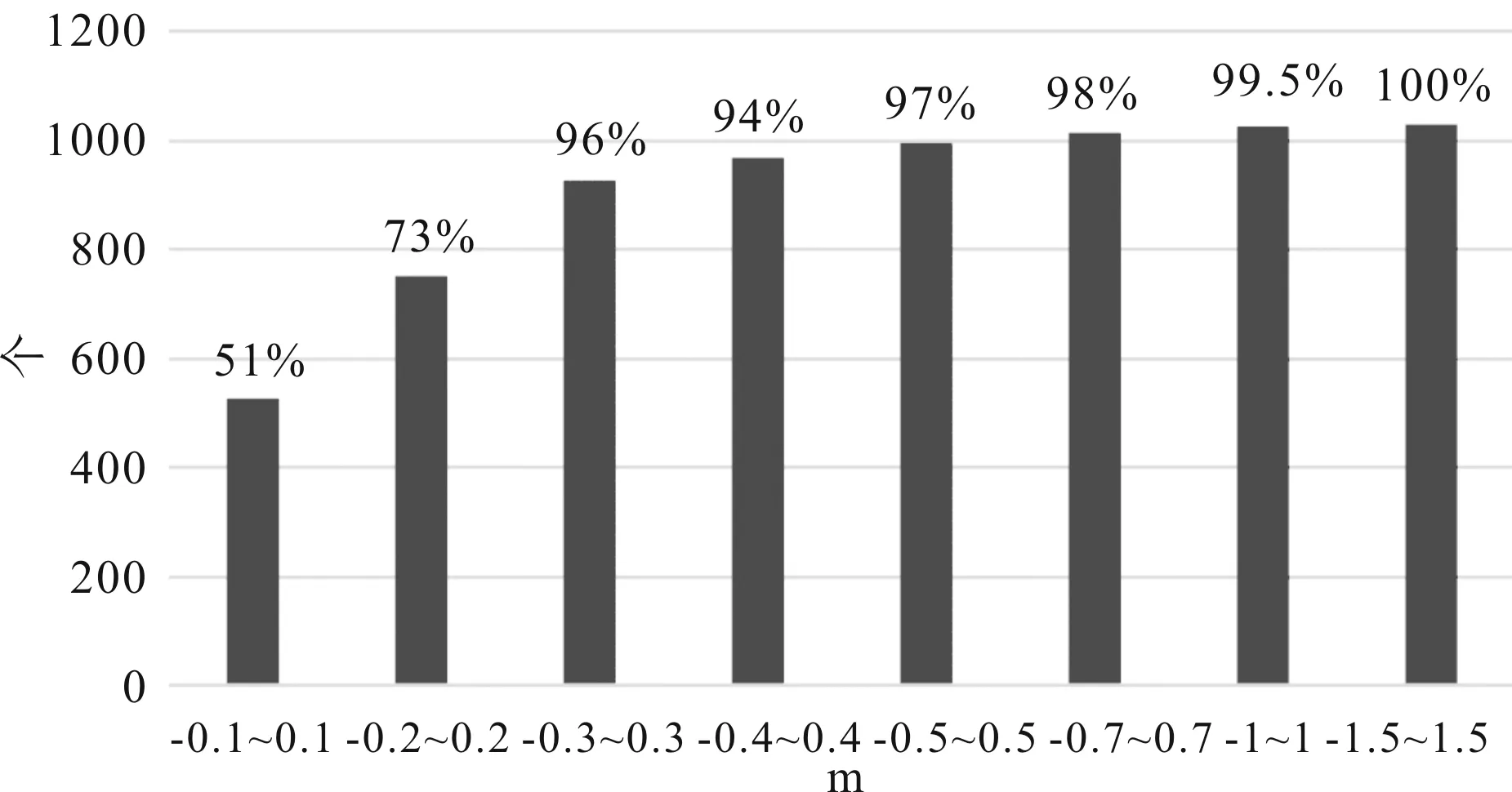
图9 高差分布区间所占百分比
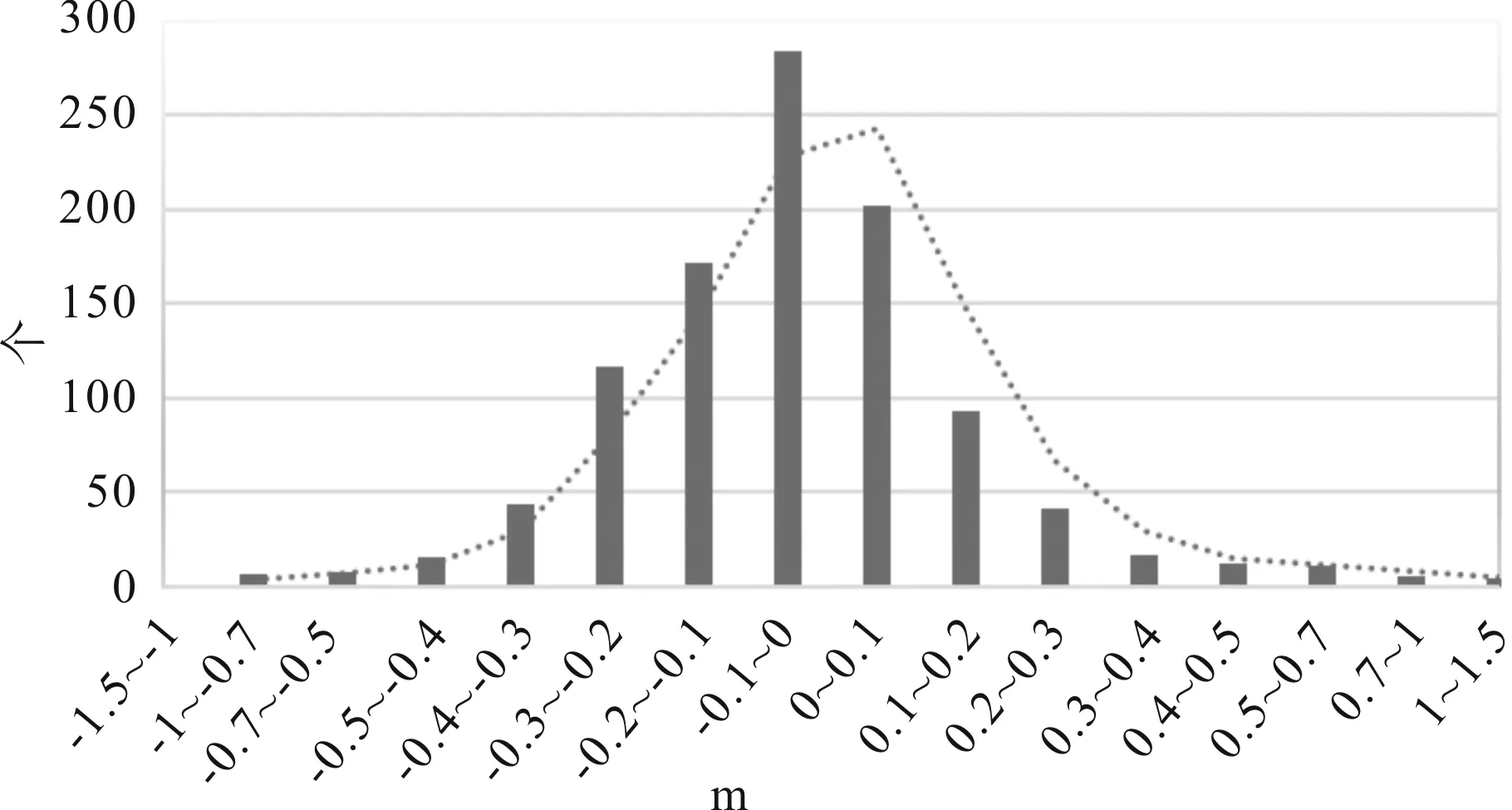
图10 高差正态分布
5 结论与展望
LiDAR相对于传统无人机航测技术来说,具有极高的分辨率、获取的信息量丰富、可全天时工作、穿透能力强等优点,成果的整体精度与精细程度更高,生产效率更高、工期相对较短,成果质量更有保障,应用价值更加深远[14]。
矿山修复工程测量因地形支离破碎、坑坑坎坎、碎石零乱,植被覆盖率高, 传统测量手段无能为力, 由于激光具有较强的穿透能力,能够获取到更高精度的DEM地形表面数据, LiDAR高程测量精度相比其他航测手段的测量精度要高,且采集的原始点密度远远高于传统航测,即使分类后平均1 m2至少一个、甚至几十个地面点,这是传统航测技术采集或人工采集手段所无法比拟的,从而保障了矿山修复测量工作的质量.对矿山修复工程后期的消方整形、底盘平整、混凝土客土喷播、覆土绿化、土地复垦等生态环境修复工作可以提供更为准确的基础测绘数据[15]。因此,机载激光雷达测量技术在矿区生态修复工程测量中具有广阔的应用前景;同时,也可以广泛应用于林业、农业等领域。
