基于空间域补偿的极化敏感阵列MUSIC测向算法
2021-02-14王文晴张晓丽秦令令赵勇武
蒋 驰, 王文晴, 张晓丽, 秦令令, 赵勇武
(上海无线电设备研究所,上海 201109)
0 引言
反辐射导弹探测系统凭借其隐蔽性好、作用距离远、抗电子干扰能力强等特点在现代军事武器系统领域中得到了广泛的应用。考虑超宽频带内的电性能要求和空气动力学外形要求,反辐射导弹探测系统多采用共形天线。而采用共形天线测向对极化信息敏感,产生的极化附加相位将影响测向精度,因此需要研究对极化信息敏感的测向算法[1]。
经典的干涉仪测向算法[2]利用两个天线之间的相位差进行测向,原理简单、运算量小、实时性强,但存在测向模糊和测向精度偏低的问题。比幅测向算法[3]由于受到天线极化、波束宽度及其它因素的影响,测向精度和灵敏度不高。立体基线测向算法[4]可以灵活排列天线并实现超宽频带内无模糊测向,但存在对相位抖动敏感、测向精度不高等问题。传统的空间谱估计算法引入了阵列思想,利用空间分散排列的传感器阵列和多通道接收机获取信号的时域和空域等多维信息,具有信号检测和参数提取灵活、信号增益高、抗干扰能力强以及空间分辨能力好等优点[5-10]。以多重信号分类(multiple signal classification,MUSIC)算法[11-12]为代表的子空间算法对极化信息不敏感,估计的噪声子空间与信号子空间在来波方向上不满足正交性要求。其根本原因是极化信息引起的极化附加相位导致谱峰位置发生偏移,从而不能正确估计来波方向(direction of arrival,DOA)。
考虑目标信号具有极化特性,需构建极化敏感阵列模型实现测向。经典的极化敏感阵列MUSIC测向算法[5]能够有效地估计目标信号DOA,但反辐射导弹探测系统在运用该算法对大入射角信号测向时,会将信号多路径、折射、绕射等情况引起的干扰直接引入到极化敏感阵列空间谱估计理论模型中,从而导致测向误差偏大,且四维搜索的运算量非常庞大。针对上述情况,本文提出了一种基于空间域补偿的极化敏感阵列MUSIC测向算法。该算法利用误差补偿方法对空间域分量进行修正,结合MUSIC测向算法,构造四维极化敏感阵列空间谱函数,通过降维谱峰搜索可实现目标信号的二维测向。本文介绍了算法实现原理,并将该算法与经典极化敏感阵列MUSIC测向算法进行比较,仿真验证算法的测向精度。基于该算法的应用背景,本文重点研究其在均匀圆阵模型中的应用。
1 算法原理
1.1 极化敏感阵列模型
均匀圆阵结构如图1所示。M个阵元均匀分布于半径为d的圆周上。仅考虑远场信号,信源足够远,则认为信号到达阵列各个阵元时是平行波。

图1 均匀圆阵
建立测向空间直角坐标系o x y z,如图2所示。天线阵列中心位于坐标原点o处,设(xm,ym,zm)为第m个阵元的位置坐标。波长为λ的远场信号以方位角θ、俯仰角φ入射至天线阵列。

图2 测向空间直角坐标系
极化椭圆为电磁波在传播方向上任一点的传播截面上电场矢量端点随时间变化得到的曲线,通过图2中直角坐标系o x y平面表征,如图3所示。
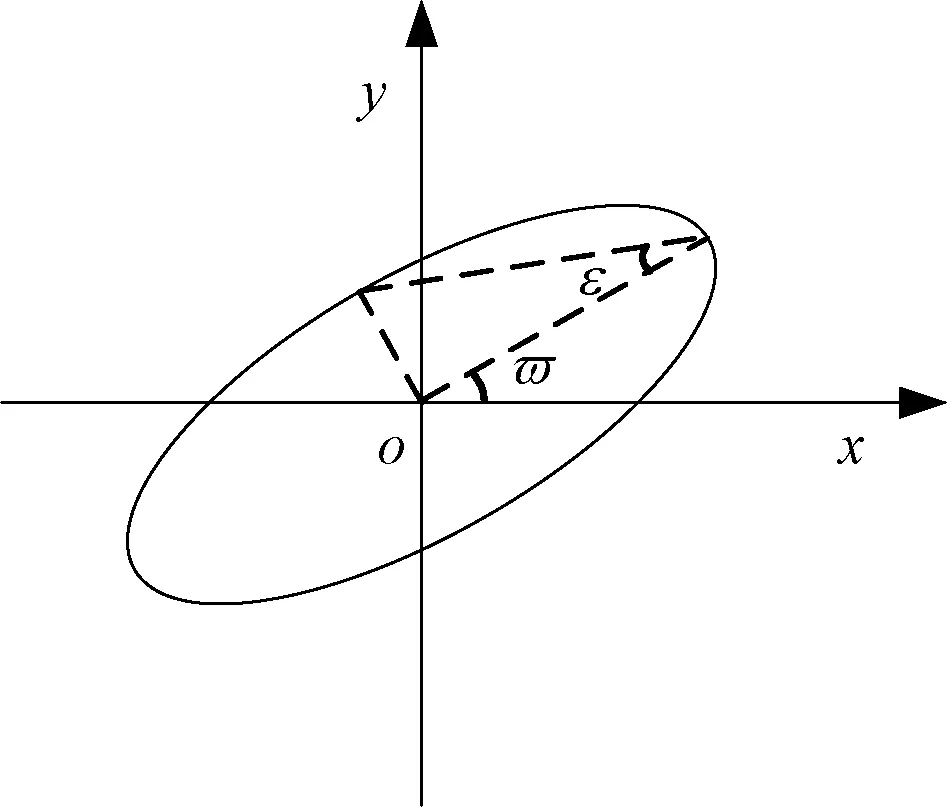
图3 极化椭圆示意图
假设噪声与信号相互独立,且满足加性独立同分布的高斯过程。则极化敏感阵列接收信号矢量可表示为

式中:A(θ,φ,γ,η)为导向矢量矩阵;S(t)是信源矢量;N(t)为加性高斯白噪声矢量。
导向矢量矩阵可具体表征为

式中:r(θ,φ)为M×1维的目标信号阵元空间相位矩阵;B为M×6维的阵列极化敏感矩阵;ψ(θ,φ)为6×2维的极化角度域角度导向矢量;h(γ,η)为2×1维的极化角度域极化导向矢量。
阵元空间相位矩阵可具体表征为

其中

式中:uθ,φ,m为第m个天线阵元相对参考点的空域相移因子;lm=[xm,ym,zm]表示第m个阵元的位置矢量;rm=[c o sφc o sθ,c o sφs i nθ,s i nφ]表示信号入射到天线阵列所在空间直角坐标系上的方向单位矢量;T为转置运算符。
极化角度域角度导向矢量ψ(θ,φ)和极化导向矢量h(γ,η)可分别表征为

r(θ,φ)为目标信号的阵元空间相位矩阵,与目标信号的位置以及天线的位置相关;B反应的是天线的指向信息,由各阵元的极化敏感矢量构成,当天线阵列的阵元摆放位置确定时,该阵列为一个常数矩阵;ψ(θ,φ)h(γ,η)为变换矩阵,h(γ,η)为信号的相位描述字参数。
1.2 极化敏感阵列MUSIC测向算法
(1)经典测向算法
基于1.1节建立的极化敏感阵列模型,对极化敏感阵列接收信号X(t)做协方差运算,求得其协方差矩阵

式中:E(·)表示求数学期望运算;H为共轭转置运算符。
对式(7)做特征值分解,利用噪声子空间与信号子空间的正交性,构造空间谱函数

式中:En为噪声子空间。
连续改变θ,φ,γ,η的值,进行四维谱峰搜索,由此得到的极大值所对应的方位角θ及俯仰角φ,即为入射信号的DOA。
上述算法模型的建立未考虑测向过程中信号多路径、折射、绕射等情况,从而导致了导向矢量矩阵A(θ,φ,γ,η)中包含的空间域分量与理论模型失配,测向结果误差偏大,且运用的四维搜索也会带来庞大的运算量。为提高测向精度,降低运算量,本文提出了基于空间域分量修正的极化敏感阵列MUSIC测向算法。
(2)基于空间域分量修正的极化敏感阵列MUSIC测向算法
如1.1节极化敏感阵列模型所示,令空间域分量D=r(θ,φ)B ψ(θ,φ),h=h(γ,η),则 极 化敏感阵列接收信号矢量可以表示为

由于信号与噪声相互独立,接收信号X(t)的协方差矩阵R可表示为

令信号功率σ2=S(t)SH(t),则

根据式(11),对协方差矩阵进行特征值分解,有

式中:λi是R的特征值,并按数值大小降序排列;ei是λi对应的特征向量;Us=[e1,e2,…,eD]是信号组成的特征子空间,D为特征值数;Λs=Di a g(λ1,λ2,…,λD)是信号对应的大特征值组成的对角矩阵;Un=[eD+1,eD+2,…,eM]是噪声组成的特征子空间;Λn=Di a g(λD+1,λD+2,…,λM)是噪声对应的小特征值组成的对角矩阵。由式(12)可知,正式期望信号导向矢量位于Us所张成的子空间内。
因信号和噪声的相互独立性,可得出σ2Dh hHDH=UsΛsUsH。当仅有一个目标信号时,Λs=[λ1]。理想情况下,σ2和λ1均表示目标信号功率,即σ2=λ1,因此可得出Dh hHDH=UsUsH,即Dh=Us。
进行空间域分量构造时,可将目标极化导向矢量h=[c o sγs i nγexp(jη)]T视为关于γ,η的二元方程组。因此可通过p组目标的极化信号来确定新的空间域分量

式中:Usq=Dhq(q=1,2,…,p),其中hq为某特定极化对应的极化导向矢量。
利用修正后的空间域分量D′对接收信号所包含的各种误差进行补偿,可消除误差源对测向精度的影响。
将D′代入极化敏感阵列接收信号模型,误差补偿后的接收信号可表示为

则其协方差矩阵为R′=E(X′(t)(X′(t))H)。对R′进行特征值分解,可求得误差补偿后的噪声子空间E′n。
构造极化敏感阵列MUSIC空间谱函数

令

则

在极化敏感阵列 MUSIC算法中,利用式(17)所构造的谱函数进行谱峰搜索求取谱峰值,相当于解决hHH(θ,φ)h的函数值最小化问题,即在理想情况下,应满足等式hHH(θ,φ)h=0。由于信号特征矢量所张成的子空间与阵列导向矢量所张成的子空间是一致的,根据信号子空间与噪声子空间的正交性,即可得到结论:噪声子空间中的任意一个噪声特征矢量和阵列导向矢量的任意一列向量都是正交的。即

式(18)左乘E′n,再左乘(D′)H,结合式(1)和式(9)可得

比较式(17)和式(19)可知,两式同时成立。将两式均看成是以极化参数γ,η为未知量的齐次线性方程组,最终极化参数的解为两式解的交集。显然,式(19)的极化域解即为两式解的交集,因而只需考虑式(19)所表示的齐次线性方程组解的情况即可。
本文算法中所考虑的极化参数的范围为极化辅助角γ∈[0,π/2],极化相位差η∈[-π,π]。因而式(19)所示的齐次线性方程组必定存在非零解,且方程组的系数矩阵H(θ,φ)必定会发生亏秩现象,其行列式的值为0,即

由行列式的值为0,对应可求得系数矩阵H(θ,φ)发生亏秩现象时的方位角θ和俯仰角φ,即为入射信号的DOA。将谱峰搜索函数转化为搜索系数矩阵H(θ,φ)行列式的极小值,即可求得行列式倒数的极大值,即

式中:argmax(·)为求极大值函数;det-1(·)为求行列式倒数的函数。所得到的极大值所对应的方位角θ及俯仰角φ即为入射信号的DOA。由式(21)可知,在利用了秩亏损方法之后,构造空间谱时无需考虑极化参数,即构造的谱函数与极化参数无关。因而将极化敏感阵列MUSIC测向算法的四维搜索降维成了二维搜索,大大减小了算法的运算量。
2 仿真验证
对经典算法与本文所提算法进行仿真,通过对比说明所提算法的性能。不失一般性,仿真过程中,选取均匀圆阵天线半径d=200mm,阵元数M=8。
2.1 经典测向算法
设目标信号分别为P波段和S波段的脉冲信号,P波段信号为水平极化,S波段信号为垂直极化。信号入射俯仰角固定为0°,方位角从+30°到-30°缓慢变化。采用经典测向算法,利用实测的幅相数据对两个波段的信号进行测向仿真,结果分别如图4和图5所示。

图4 P波段目标信号经典算法测向仿真
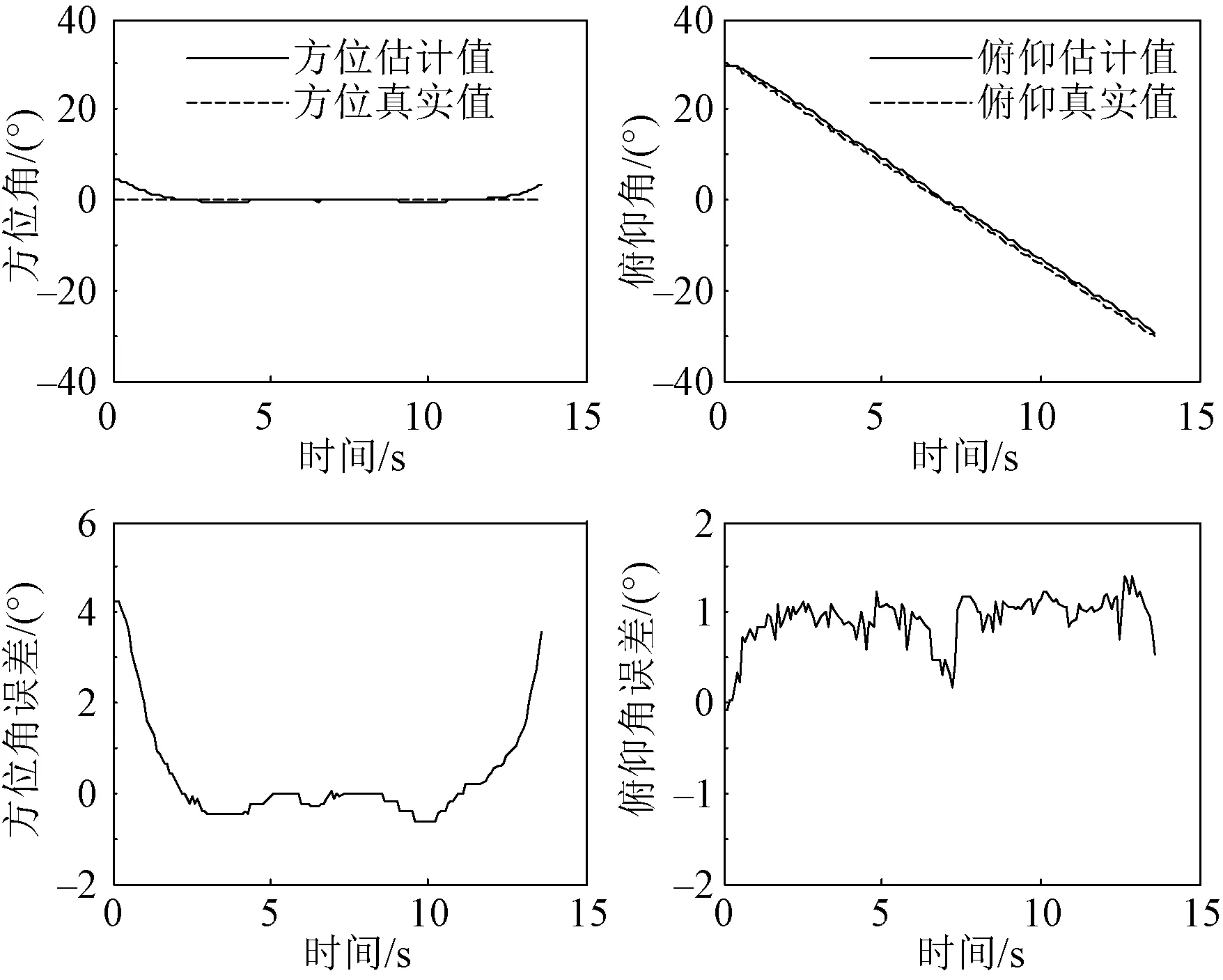
图5 S波段目标信号经典算法测向仿真
从图中可知,采用经典算法对P波段和S波段目标信号均可实现方位角-30°~+30°范围内的有效测向。P波段目标信号方位角误差在5°以内,俯仰角误差在10°以内;S波段目标信号方位角误差在5°以内,俯仰角误差在2°以内。不同波段目标信号的最大测向误差均在大入射角度时产生,这是由于大入射角度时入射信号受弹体、天线罩等遮蔽的影响,引起了相位畸变。
2.2 基于空间域补偿的极化敏感阵列MUSIC测向算法
设目标信号分别为P波段和S波段的脉冲信号,P波段信号为水平极化,S波段信号为垂直极化。信号入射俯仰角固定为0°,方位角从+30°到-30°缓慢变化。采用本文所提算法,利用实测数据对两个波段的信号进行测向仿真,结果分别如图6和图7所示。

图6 P波段目标信号本文算法测向仿真

图7 S波段目标信号本文算法测向仿真
由图可知,采用本文所提算法对P波段和S波段目标信号均可实现方位角-30°~+30°范围内的有效测向,且P波段和S波段目标信号二维角度测量误差分别在3°和2°以内。与经典算法相比,采用本所提文算法仿真的测向误差有明显降低。可以看出该测向算法具有较高的测向精度。
3 结论
对采用共形天线的反辐射导弹探测系统的测向技术进行了研究。针对均匀共形圆阵模型,提出一种基于空间域补偿的极化敏感阵列MUSIC测向算法。该算法利用误差补偿对空间域分量进行修正,结合MUSIC测向算法,构造四维极化敏感阵列空间谱函数,通过降维谱峰搜索可实现目标信号的二维测向。与经典极化敏感阵列MUSIC测向算法相比,该方法不仅抑制了系统的前端误差,避免了测向过程中的空间域分量与算法理论模型失配问题,可实现对目标信号的高精度测向及跟踪,而且凭借较小运算量的优势,可广泛应用于工程测向领域。