基于SimCoder的电压反馈控制降压电源器设计
2021-02-10丁润祥
何 芳,丁润祥
(滨州学院 电气工程学院,山东 滨州 256603)
电压控制模式是一种控制电压输出的技术,这种技术在20世纪稳压电源发展的开始阶段就已得到应用,我国的直流稳压电源在20世纪60年代就已经起步研究[1],至今为止在开关频率和电源单机功率等方面已经取得了长足进步[2-4]。电压反馈控制电源技术能为各种电子产品提供稳定的直流电源,广泛应用于汽车行业、电子信息、智能制造等方面[5]。因此研究控制效果更好的电源控制方法和控制器设计具有重要的意义。
PSIM(Power Simulation)是面向电力电子领域以及电机控制领域的仿真应用包软件,它具有模拟高速、用户界面友好等特点,能为电力电子电路的解析、控制系统的设计、电机驱动研究等提供有效的模拟环境。PSIM还具有强大的模拟引擎,它的高效算法克服了许多其他模拟软件在容易收敛失败、模拟时间长等方面的问题。PSIM软件中的SimCoder模块为自动代码生产模块,它能将控制电路原理图自动生产C程序代码以应用于DSP控制器,加快了设计流程,缩短了数控直流电源开发时间并降低了成本。因此本文利用PSIM平台设计了一种基于SimCoder的电压反馈控制稳压直流电源电路。
1 电压反馈控制电路分析
稳定电路是无论输入信号变化还是负荷发生变化,输出信号都几乎不会变化的电源电路[6]。稳定电路种类很多,根据输出电流的种类分为直流稳定电路和交流稳定电路两种;根据稳定电路和负载的连接方式来分为串联和并联稳定电路两种。
闭环(闭环结构)也叫反馈控制系统,其工作原理是:采集输出的信号值并将其和预设的给定值做对比,通过对比双方差异,对系统进行调节,使差异减小,输出信号接近给定值。为提高输出的精度和动态响应特性,反馈控制环路的参数补偿器可以采用TYPE3补偿器或PI补偿器。对这两种补偿器的原理分析如下。
1.1 TYPE3补偿器的分析
控制电路就是将电源器主电路的输出信号与电压斜坡信号进行比较,输出一定的占空比信号,以调节开关的状态,从而使得输出电压恒定。其中TYPE3补偿器模块的传递函数可表示为
其中:Tz1=1/ωz1,Tz2=1/ωz2,Tp1=1/ωp1,Tp2=1/ωp2。
TYPE3控制器具有两个零点和两个极点,极点为fz1=ωz1/(2π),fz2=ωz2/(2π),零点为fp1=ωp1/(2π),fp2=ωp2/(2p)。两个零点的频率一样,在同一位置;两个极点的频率一样,在同一位置。
1.2 PI调节器的分析
PI调节器是一种线性控制器,它根据给定值与实际输出值构成控制偏差,将偏差的比例和积分通过线性组合构成控制量,对被控对象进行控制。它分为比例环节和积分环节,比例环节的作用是以减少偏差。积分环节主要用于消除静差,提高系统的无差度。总的来说,在控制工程实践中,PI控制器主要是用来改善控制系统的稳态性能。
PI控制器的传递函数定义为G(s)=k×(1+sT)/(sT)。
2 仿真模型与波形
主电路仿真模型及参数设置如图1所示。输入电压为50 V,要求设计一个最大输出功率为100 W的单环电压反馈控制降压型稳压直流电源,其输出电压稳定在24 V。

图1 主电路模型
为模拟输出负载功率变化,负载用两个电阻RL1和RL2(均为24×24/50 Ω)通过电子开关SS1和阶跃信号VST进行并联。在阶跃时间点之前仅RL1工作,此时直流电源输出的功率为50 W,在阶跃时间点时,控制双向电子开关SS1闭合,将RL1和RL2并联,此时直流电源输出的功率变成100 W。RC1和RC2为缓冲吸收电路。模型中IIN、VIN、PWM、IL、VOUT均通过“Label”标签引出,方便绘制电路。IIN与IL为电流传感器,通过更改参数可以使电流获得不同增益,并传递给控制电路,电流传感器的内阻为1 Ω。VIN与VOUT则为电压传感器,通过更改参数可以使电压获得不同增益,并传递给控制电路。PWM(脉冲宽度调制)是一种模拟控制方式,通过采集相应的控制信号的变化来调整晶体管基极或MOS管栅极的偏置,来达到控制晶体管或MOS管导通时间的目的,从而改变开关稳压电源的输出。
2.1 基于TYPE3补偿器的控制电路设计分析
控制环路仿真模型及参数如图2所示。其中主要控制器采用TYPE3补偿器,其参数设置已在图中标示,由于输出电压为24 V是通过电压传感器采样后缩小了0.024倍输出,故Vref=0.024×24=576 mV。限制器LIM1是通过设置限制器上下限来稳定输出,当输出超过限制器范围时,则将输出限制为限制器的上下限。降压器主电路输出电压经电压传感器采样后和电压Vref一起送入TYPE3,其输出信号经限幅器LIM1,限制在0~5 V,然后与锯齿波载波信号fsw比较得到一定占空比的PWM信号,调节MOS管的导通情况,从而实现逐步调整系统电压到期望的参考设置值上。

图2 TYPE3补偿器控制环路模型
设置仿真控制步长为2.5 μs,仿真时间为0.06 s,输出波形如图3所示。经过较短时间的振荡后电压稳定,并且直流电源输出电压稳定在期望值24 V。当功率从50 W突变到100 W时,输出电源出现微小的跌落,但在控制环路的自动调节下,快速稳定在24 V。

图3 TYPE3补偿器控制环路输出电压波形
对控制环路TYPE3补偿调节的输出和限幅器LIM1之间添加AC Sweep扫描,可得到其频率特性响应曲线,系统的增益裕量为18.28 dB,相位裕量约为45°,满足系统稳定性要求。
2.2 修改TYPE3参数后对输出的影响
对TYPE3控制补偿器参数进行修改以研究其参数对输出电压波形的影响(输出电压为24 V),见表1。

表1 控制器参数对输出电压波形的影响
对表1进行分析后可知:Fz越大电压趋于平稳所需的时间越短,即能更快稳定下来,但是0.03 s时增加一个负载,电压波动的时间更长;Fp越大0.03 s之前趋于平稳所需的时间越短,但0.03 s增加一个负载后波动时间变长。
2.3 输出电压的大小和稳定响应控制分析
通过分析主电路及控制环路得出:电压Vref的参数设置影响输出电压的大小(输出电压=Vref/0.024);TYPE3补偿调节器的参数影响输出电压波形的达到平稳的时间,增加负载后的电压波动及恢复平稳所需的时间。因此通过改变电压Vref的参数设置输就可以满足输出电压的可调节的要求。
2.4 开环控制电路
开环系统也被称为“无反馈系统”。系统的输出与输入直接相关,在系统不变的情况下,输入不变,输出不变;输入变化,输出随之改变。没有反馈的回路,输出不会影响输入。开环模拟控制的降压电源器仿真波形如图4所示。
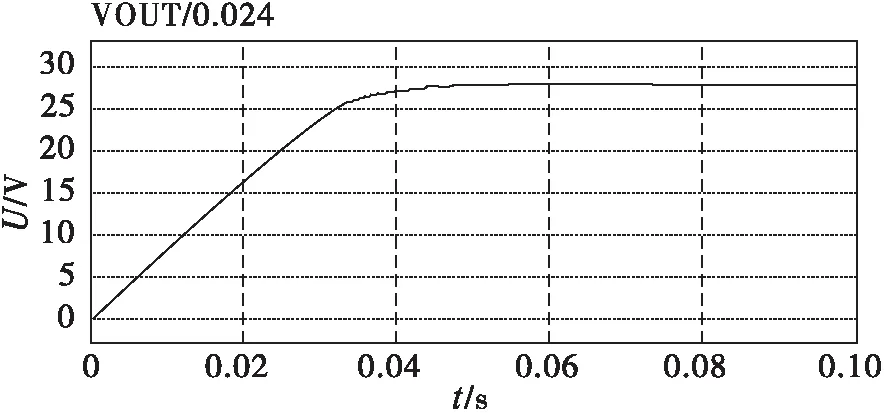
图4 开环控制电路输出电压波形
通过对比图3和图4可知,开环输出电压波形达到24 V的稳定电压大约需要0.05 s;而基于TYPE3控制环路的电压反馈电路的输出电压波形在接通后0.005 s就达到24 V,并且电压稳定,其电压稳定所需时间是开环的1/10,优势明显。
2.5 基于PI补偿调节器的控制电路
其控制环路仿真模型及参数与基于TYPE3补偿器的控制电路类似,将TYPE3补偿器改为PI补偿器,并设置其增益Kgain=843.2×10-3,Ti=2.32×10-3。得到的仿真波形如图5所示。

图5 PI控制环路输出电压波形
通过对比图3和图5可知,基于TYPE3控制环路的输出电压达到稳定需要0.005 s,在0.03 s时改变负载电路,系统的输出电压发生很小的波动,波动时间极短;PI补偿器达到输出电压稳定需要0.02 s,但当改变负载后需要0.01 s的时间才能恢复稳定。而基于TYPE3控制环路的输出电压基本不受负载变化的影响,由此可见,TYPE3补偿器比PI补偿器性能更好。
2.6 基于TYPE3调节器的单闭环电流反馈的恒流控制电路
前面都是为了电压的稳定,通过电压反馈,使电路的输出无论是刚接通,还是增加负载后,电压都能够稳定在预设值,达到电压反馈控制电压的目的。同样将TYPE3调节器应用于恒流电源设计,也可使输出的电流相对稳定。其控制环路仿真模型与图3相似,将电压反馈信号改为电流信号。并设置仿真控制步长为2.5 μs,仿真总时间为1 s,仿真输出的电流波形的变化太大,无法稳定且谐波较多,无法满足预期要求。
为此对主电路部分进行改造,在L1与IL中间加入RLC滤波电路,参数设置为R=20,L=2000×10-6,C=2000×10-6。最后得到仿真波形如图6所示。通过波形分析,波形可以满足预期目标。

图6 改进的功率变换电路输出电流波形
3 结论
本文利用PSIM软件设计了电压反馈降压电源器的模拟电路。控制器模型采用TYPE3控制补偿器并与开环控制、PI控制电路进行了对比,结果表明TYPE3控制补偿器控制电路输出能更快地达到预设值,且更加稳定。在此基础上又对电路输出电压可调性进行分析,并设计了采用TYPE3调节器的单闭环电流反馈的恒流控制电路和必要的滤波电路,通过电流仿真波形分析,得出该系统能够达到恒流输出的目的。
