二阶差分模型预测控制在热工过程中的应用
2021-02-07杨文健秦鹏程
李 轩,杨文健,秦鹏程
(华北电力大学 自动化系,河北 保定 071003)
0 引言
模型预测控制(MPC)在化工、汽车、航空航天等领域得到了广泛的应用。在每个采样时刻,MPC 计算控制律序列,以优化预测未来时刻被控对象的控制律。MPC 通过计算目标函数得到最优控制律,从而得到系统最优预测输出值。如今,已经发展了多种基于MPC 的控制策略。
锅炉过热蒸汽温度是发电厂机组安全与经济运行的重要参数之一[1]。若温度过高则容易损坏过热器及汽机的进汽部件,影响机组安全;若温度过低,则会影响到机组的经济性。因此,锅炉的过热汽温必须严格控制在规定的范围内。但由于过热汽温对象具有非线性、大滞后和时变性,采用常规的串级控制策略往往难以获得理想的控制效果。近年来,人们开始研究采用先进的预测控制策略来提高过热汽温的控制品质,得到了较为满意的结果。
本文提出一种新的MPC 算法。基于二阶差分运算内模型控制器,建立了一种新的预测模型[2]。不同于其他使用被控对象输出的方法,该模型有两个嵌入式积分器[3],针对电站锅炉过热汽温控制的大滞后和时变性,提出了鲁棒性强的预测控制策略,并通过仿真研究证实了其有效性。
1 模型预测控制的增广模型
考虑以下n 阶离散SISO 对象:

其中,i 是离散时间指标,xn(i)∈Rn×1; un(i)∈Rn×1、yn(i)∈Rn×1分别是被控对象的状态向量、输入和输出,An(i)∈Rn×n、Bn(i)∈Rn×1、Cn(i)∈R1×n组成被控对象模型。在式(1)两边同时进行一阶差分运算,得到:

其中:

另有, yn(i+1)=Cnxn(i+1)。由式(2)、式(3)可得:

由式(3)、式(4)推导出被控对象的增广模型[4,5]:

由于y(î + j|î) = Cx(î + j|î),预测输出为:

式(7)可改写为矩阵形式:

其中:

设r(i)和R=[1,1…1]Tr(i)∈Rp×1分别为被控对象参考向量和设定点向量。根据式(15)中的目标函数,得到使预测输出向量Y 与R 的误差最小的U 的最优值:

其中,Ic为c×c 的单位矩阵, rw为调优参数。在式(14)中,假设R 在预测时域内为常数。由式(10)和式(15)可以证明∂J/∂U=2(φTφ+G)U-2φT(R-Fx(î))。式(15)的最优解使得∂J/∂U=0,则有:

在预测控制滚动优化中,仅使用U 的第一个样本,即U(i)来计算控制律:

在式(6)中,u(î)=Δun(î)。因此,通过对式(17)中得到的u(î)积分,得到被控对象控制律un(î)。式(6)中的扩充模型具有嵌入式积分器。
2 基于二阶差分模型的MPC方案
图1 是基于二阶差分算子(Δ2)的内部模型控制器(IMC)的MPC 模型。二阶差分算子定义为:Δ2a(i)=Δ[Δa(i)]=Δa(i)-Δa(i-1);内模控制器模型为:(t)=Aax(t)+Baün(t)。其 中,xT(t)=[nT(t)(t) e(t)],xn(t)为被控对象状态向量,un(t)为控制输入,e(t)为跟踪误差,Aa和Ba取决于被控对象模型。

图1 基于二阶差分算子的内部模型控制器Fig.1 Internal model controller based on second order model
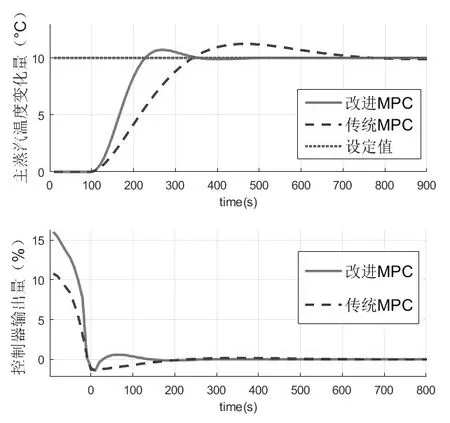
图2 定值扰动仿真图Fig.2 Simulation diagram of fixed value disturbance
设e(i)=r(i)-yn(i)为跟踪误差。类似于内模控制器模型,Δ2xn(i),e(i)和Δe(i)被用于创建一个新的增强模型,用于输出预测。注意,e(i+1)=r(i+1)-yn(i+1)对式(3)、式(5)和e(i+1)进行了一阶差分运算,由于算子具有线性,Δ2xn(i+1)、Δyn(i+1)和Δe(i+1)可以表示为:

其中:

将式(18)、式(19)组合,得到式(20)、式(21)所述的增广模型。所提模型的输入和输出分别为Δ2un(i)和e(i)。

设e(î+j|î)为î+j时刻对误差的预测;j= 1,……p,根据x(i)的值。设Δ2un(î+h)为模型在î+h 时刻的输入;h =0,1,……c-1。式(6)和式(20)中的模型均基于状态方程x(i+1)=Ax(i)+Bu(i)。而且,式(8)和式(9)与x(i)、u(i)、A和B的值无关(不同于式(5)和式(21))。因此,可以使用式(10)来预测提出的模型输出:

其中,F和φ定义在式(13)、式(14)中,Y和U的结构与Ya和Ua分别定义在式(11)和式(12)中相同,但其中元素分别为:u(î+h)=Δ2un(î+h)和y(î+j|î)=e(î+p|î)。
跟踪误差e(i)的期望值始终为零。因此,Ya的设定点向量R是一组零(R=0),即对于所提出的增广模型,预测范围内的设定点是恒定的。因此,令(式(15)~式(17)中的R= 0,Y=Ya,U=Ua,可应用传统MPC 中的反馈校正和滚动优化策略,得到u(î):

在提出的增强模型中,u(î)=Δ2un(î)。因此,通过Δ2un(î)的双重积分得到控制律:

3 仿真结果
为了验证本文提出的方法的控制效果,对其进行MATLAB 仿真。以某电厂的过热汽温模型G(s)=1.24/(1+60s)2e-100s作为被控对象进行仿真研究,来评估所提方法的性能。将提出的控制器(使用c=2,p=5,rw=10)与传统的MPC 控制器(p=2;c=5;rw=10)进行仿真实验对比。
令rw=0,加入控制量扰动,对提出的控制器与传统MPC 控制器进行仿真实验对比。

图3 控制量扰动仿真图Fig.3 Simulation diagram of control disturbance
由图2 可知,采用传统MPC 算法时,主汽温控制系统的超调量为19.15%,调节时间为79.83s,采用改进后的算法时超调量为9.68%,调节时间为31.46s。相比于传统MPC 控制器,采用改进型MPC 控制器时主汽温控制系统的超调量更小,调节速度更快。由图3 可知,改进后算法具有更强的稳定性和抗干扰能力,通过实验仿真可知改进后算法具有很好的控制品质。
4 结束语
本文提出了一种基于二阶差分模型的模型预测控制算法,并将其应用于电厂过热汽温控制过程。与传统模型预测控制算法相比,该控制方案具有良好的鲁棒性和更快的响应速度。通过MATLAB 仿真实验证明,该方法针对过热汽温被控对象大迟延和时变性进行了改善,使得系统抗干扰能力增强,最终的控制效果令人满意。