果园螺旋式颗粒肥深施小车的设计
2021-02-07李希斌
李希斌
(浙江农林大学工程学院,浙江 杭州 311300)
0 引言
林果业是我国重要的产业,无论是果树的种植面积还是水果的产量在世界范围内都是名列前茅的[1-2]。 然而,我国的果园多为密植果园,由于果树枝干茂盛且行距小,加上柱桩等空间的限制,导致大型施肥机具通过性差甚至无法进入[3];其次,我国果园施肥的机械化程度较低,多是人工挖穴施肥或者采用机械挖穴人工撒肥的方式[4-5]。这些方式显然存在许多的弊端,一方面人力劳动强度大,施肥效率低下;另一方面不能精确控制施肥量,容易造成肥料的浪费以及土壤河流的污染[6]。
为了解决这些问题,国内外科学家们研制了开沟/挖穴机械辅助施肥,在开沟施肥机械方面则有圆盘式开沟机、犁铧式开沟机和链式开沟机3 种类型[7]。 然而,现有的果园施肥小型开沟机,虽然实现了机械化,但易损坏果树水平根系,且效率较低;小开沟机因其固有的机械特性,开沟深度一般在150 mm 以下,深度不够导致颗粒肥易挥发,利用率低且污染环境。相较开沟施肥方式,挖穴施肥则大大降低了对果树根部的损害,有利于植物根部营养的吸收。 在挖穴施肥机械方面有手提式、背负式以及悬挂式[8]。
然而,这些机械主要是完成挖穴作业,施肥和覆土还要依靠人工完成,功能单一,不能很好满足果树对施肥作业的要求。 为了解决这些问题,近年来,我国学者研制出了一批功能集成度较好的挖穴施肥机。
为了实现挖穴、施肥、覆土一体化作业,山东农业大学研发了一款果园施肥机[9]。该机通过步进电机控制施肥量,可以根据果树的生长情况进行定量施肥,有效地提高了肥料的利用率。 但仍存在以下问题:一是该机没有行走驱动装置,操作不便;二是升降平台仍然需要人工操作,比较费时费力。
新疆农业大学的张洪根据新疆密植果园的特点,研制了一款自走式密植果园挖穴施肥机[10]。 该机功能集成度高,整机尺寸小,作者对整车的行走系统设计了控制电路,使其能自由行驶在果园中进行作业。 然而,该车升降系统采用碟刹制动,该刹车片磨损较大可能需要频繁更换,且碟刹的安全稳定性较差,可能引发不必要的事故。 因此,迫切需要研究一款安全稳定、林果园通过性好、可将颗粒肥深施又能保护植物水平根系的挖穴施肥机械。
1 果园深施肥小车结构及工作机理
1.1 施肥小车的整体结构
在考虑到目前国内的化肥使用情况及在化肥使用时存在的如工作繁重、效率低、化肥对环境的污染等问题。本文设计了一种果园螺旋打孔高效深施肥小车,并使用Creo4.0 软件进行了三维建模及渲染,其模型效果图如图1 所示。

图1 果园深施肥小车三维模型
本施肥小车主要用于作业面积不大,需要施肥的林地、果园等。 确定施肥机的主要性能参数如表1 所示。
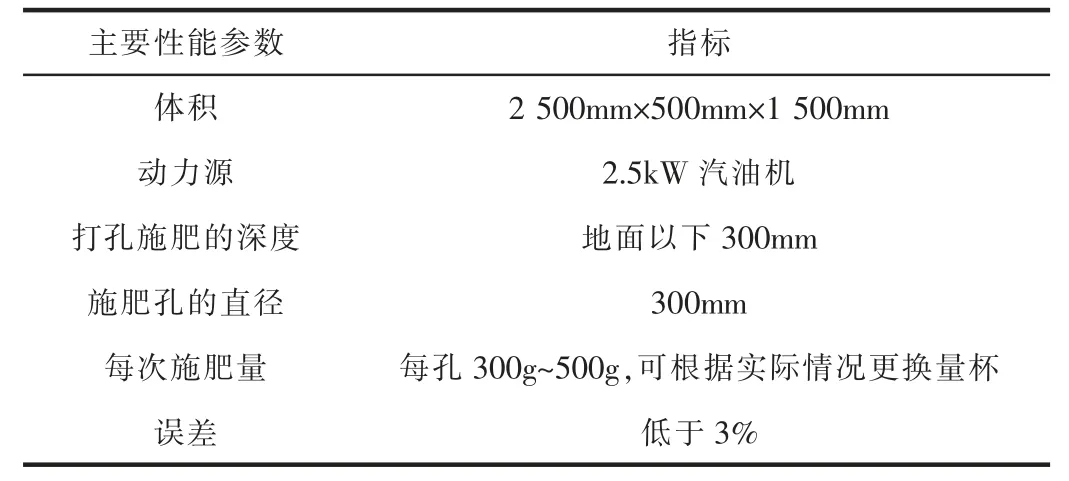
表1 果园深施肥小车主要性能参数
1.2 施肥小车的工作原理
果园深施肥小车的结构由机架、 传动系统、 集土装置、施肥装置、升降装置等组成。 首先,由驾驶员行驶小车至指定作业点,启动挖穴按钮,此时挖穴汽油机启动,通过变速箱降低输出转速,并通过与锥齿轮啮合将拖拉机输出轴的横向传动变为纵向传动,当锥齿轮与升降轴下锥齿轮啮合,升降杆高速旋转,带动液压泵工作,使液压缸收缩并带动钻头下降,集土装置随钻头下降逐渐张开以收集抛出的土壤。 当挖到设定的深度时,触发底部的离合开关,钻头停止钻坑,此时将锥齿轮换齿啮合(换挡),螺旋钻头反转,反向带动液压泵工作,使液压缸反向推出并带动钻头上升。 当钻头被提到规定高度的同时,此时触发排肥开关,排肥口打开,储肥口同时关闭,肥料顺着排肥管流入挖好的穴中。 施肥动作完成后,钻头继续上升,施肥开关被弹簧弹回,此时排肥口关闭,储肥口开启,为下一次施肥做准备。 随着螺旋钻头上升,带动集土装置逐渐闭合并将抬升的土壤全部推入穴中。 当螺旋钻头继续升至最高点时,触发顶部的离合开关,钻头停止旋转上升。随后驾驶员行驶小车至下一施肥点,车尾的压土装置会将疏松的土壤压实,挖穴施肥覆土过程至此结束。
2 果园深施肥小车关键部件的设计
2.1 挖穴覆土装置的设计
挖穴覆土装置由负责挖穴的螺旋钻头以及收集土壤的集土箱两部分组成,其结构如图2 所示。
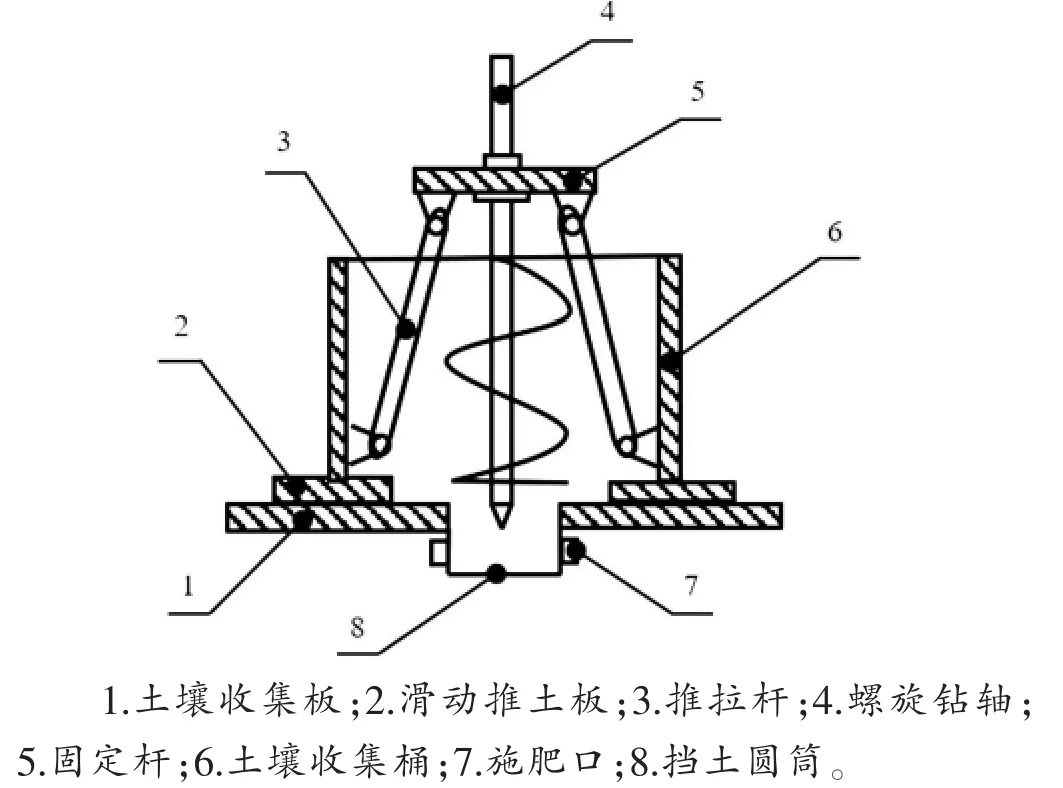
图2 挖穴集土装置示意图
施肥小车挖穴螺旋式钻头的各项设计参数如表2 所示。 集土箱与钻头底部通过固定杆相连接,使集土箱和螺旋钻头产生同步位移,用连杆将集土箱连接在螺旋钻头上,箱底通过铰链连接,使得集土箱呈水平开合运动达到集土与覆土的目的。
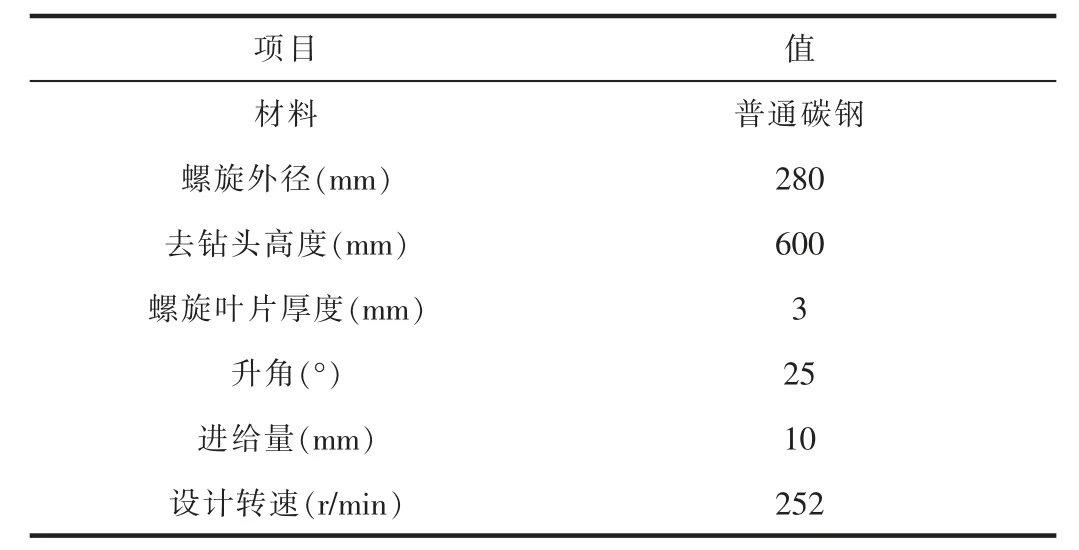
表2 螺旋钻头参数表
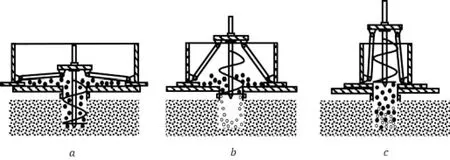
图3 挖穴施肥原理示意图
挖穴集土装置的工作过程如图3 所示。螺旋钻头4 在液压升降杆的带动下下降,钻轴固定杆5 随同钻轴向下运动,通过铰链带动推拉杆3 向下运动,并迫使推拉杆下端连接的集土箱6 沿着收集板1 上的槽向外滑动,使土壤收集箱6 呈左右张开,挖穴抛出的土壤(黑色实心圆圈表示)在土壤收集板1 上方不断被收集。 挖穴结束后,钻头的螺旋叶片带土上升,并在钻头离开土面以后触发施肥开关施颗粒肥(白色空心圆圈表示)。 固定杆5 跟随钻轴4 上升,迫使推拉杆3 拉动集土箱6 向穴内推土,部分粘结在土壤收集板1 的土块也会被滑动推土板2 刮落,从而较好地解决了粘性较大土壤粘结的问题。
2.2 施肥装置的设计
挖穴动作结束后,钻头的螺旋叶片带土上升,并在钻头离开土面以后触发施肥开关施颗粒肥。 施肥装置的结构如图4 所示,肥料箱通过螺栓安装在机架的施肥机构支架上,量筒的上下两端焊有端板,每个端板由两块平板焊接而成,两块平板中间有缝隙,量筒的一端焊接在肥料箱下方,另一端与施肥管相连,上舌板与下舌板为联动式舌板,分别插入量筒上下两端板的缝隙中。
上、下舌板同时动作,共同构成联动式施肥的工作装置,它们的区别在于上、下舌板上通孔的位置不同,两个舌板上的通孔在水平面上的投影为两个相切的圆,这样可以使肥料箱与量筒、 量筒与施肥管之间其中一个连通时另一个断开,肥料箱与施肥管不直接连通,保证每次的施肥量等于量筒的体积,使施肥顺利进行。
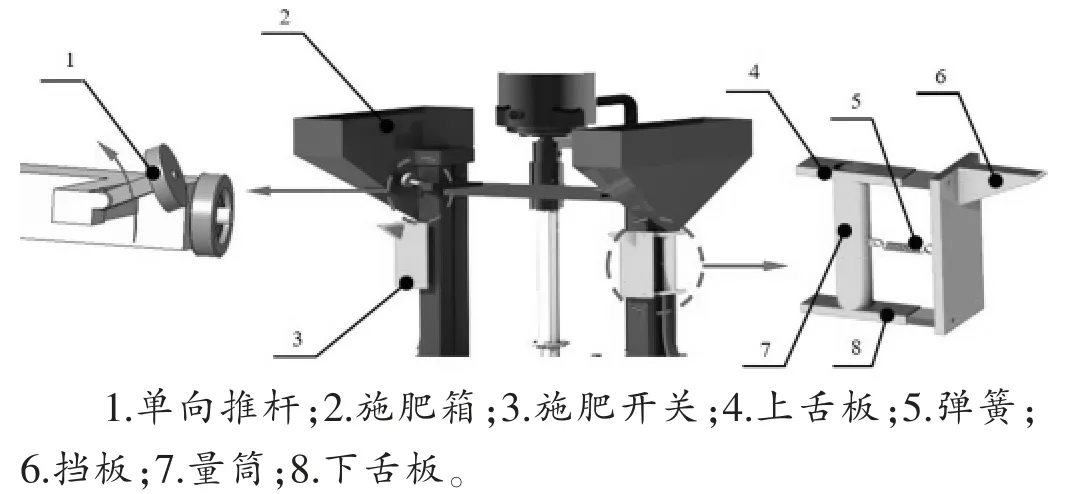
图4 施肥装置结构图
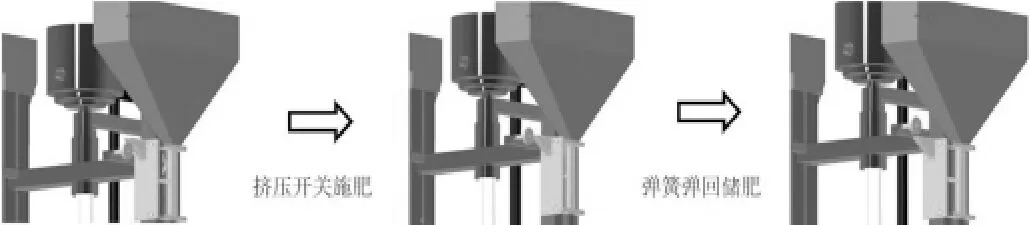
图5 施肥装置工作原理示意图
该装置的工作原理如图5 所示。 当联动式舌板处于初始位置时,肥料箱与量筒相连通,量筒与施肥管断开,肥料流入量筒中储存备用;随着螺旋钻头上升,带动推杆挤压开关时,量筒逐渐与肥料箱断开,与施肥管相连通,储存在量筒中的肥料落入挖好的穴中,完成施肥过程。 由于联动式舌板的联动作用,使得每次的施肥量是确定的;当推杆继续上升离开挡板后,弹簧将挡板推回原位,量筒与肥料箱相连通,与施肥管断开,肥料箱中的肥料流入量筒中,用于下一次施肥。
3 结论
本文确定了挖穴施肥机的总体方案,利用Creo4.0 设计并建立果园挖穴施肥覆土一体机各主要机构的三维模型并进行虚拟装配,并对施肥机的关键机构进行了创新设计。
1)设计了一种新型的挖穴覆土装置,该装置的收集器能随着钻头的运动而水平张开合拢,施肥结束后能将收集的土壤推回挖好的穴中,特设计滑动推土板,解决了土壤粘结在桶壁的问题。
2)设计上下舌板联动式排肥装置,该装置结合安装在升降导轨上的推轮,可以在钻头上升的同时触发施肥动作。 上下舌板同时动作,在一个工作周期内同时完成储肥和施肥动作。
