基于物联网的环网柜机械特性监测技术研究
2021-02-05江奕军王丽群孟浩杰潘黄萍
江奕军,王丽群,孟浩杰,潘黄萍
(杭州电力设备制造有限公司,杭州310000)
0 引言
近年来物联网技术的发展大大改变了人们的生活,通过云智能分析及大数据整合使信息得以高效利用。同时国家节能减排战略的提出使电能作为清洁能源成为关注的焦点,同时对电力系统的安全稳定运行提出了更高的要求。环网柜在电力系统运行中扮演着重要角色[1-3],然而在环网柜的故障中机械特性故障发生得最多。
本文将物联网技术同环网柜机械特性监测系统结合起来进行研究,可以智能化地管理各种设备运行,在研究中发现应用精确度高的环网柜监测系统能够在最大限度上减少系统发生故障的概率,通过物联网技术的智能化分析能够及时修复系统故障,使系统运行更加安全可靠且减少运维成本[4-5]。
目前大多数学者对于环网柜在线监测系统的研究还不够深入,大部分集中在对环网柜的温度、湿度以及局部放电等进行监测分析上,而由清华大学高压绝缘技术研究所研究的高压断路器参数测量分析系统对于机械特性的研究是比较全面的。
本文主要对环网柜的机械特性进行分析研究,通过基于物联网的通信技术对环网柜内部运行状态和参数进行在线实时监测,应用物联网技术将收集的数据上传。通过本文所提技术可以使运行管理人员实时掌握其内部的运行情况,并通过该运行情况做出相应评估。通过评估结果,运行人员可以发现环网柜运行过程中可能出现的故障隐患并及时排除[6]。同时可以根据所得出的数据进行分析计算,记录故障发生的次数以便作为监测评估的依据,使设备的检验周期得到延长并减少检验成本[7-10]。
1 环网柜机械特性在线监测系统总体设计
环网柜机械特性在线监测系统由传感器、下位机、通信、人机交互及上位机等多个模块组成,系统监测到的信号最终反馈到物联网平台对环网柜进行智能操作与控制。先由前端的传感器采集系统信号经过调理完成数/模转换,然后将信号传输到下位机并经过信号处理分析,检测到的信号若发现异常则系统将对环网柜进行反馈使其动作(跳闸或发出预警信号)[11]。同时会将故障信号进行存储记录,便于对环网柜进行更好的检测与控制,再将信号经过4G/5G 通信模块上传到上位机实现物联共享,系统总体结构如图1 所示,图中CPU 为中央处理器。

图1 系统总体结构Fig.1 Overall structure of the system
传感器型号是根据环网柜的机械特性进行分析及研究后选用的。环网柜行程及时间的检测装置选用迈恩公司生产的KTM 拉杆式直线位移传感器和采用增量式光电旋转的ZSP3806编码器。环网柜分/合闸线圈中电流的监测采用中旭公司的NC-15LTSR 型霍尔电流传感器。分/合闸的时间检测是以分/合闸线圈中有电流流过为开始进行计时,以线圈失电为分/合闸的结束点,从开始计时到结束点的时间即为分/合闸时间[12]。本文中环网柜监测应当满足的技术参数包括:传感器量程范围,(70.0±0.5)g;精 度,0.5%~3.0%;分 辨 率,0.05%~0.50%FS(全量程)。
2 环网柜机械特性在线监测系统硬件设计
2.1 传感器模块
数据采集模块包含开关量及模拟量输入电路。开关量输入电路如图2所示。模拟量输入电路中想要得到适当的电流值,需要串联限流电阻来降低发光二极管的电流,同时2 个二极管还可以实现对光耦的保护与控制。电路中有2个独立的电源对电路进行供电且分别实现接地,实现2 个电路的完全隔离。模拟量输入电路由若干个独立的单通道组成,并且每个单通道都具有较高的传输效率来保证数据的实时性。模拟量输入电路如图3所示。
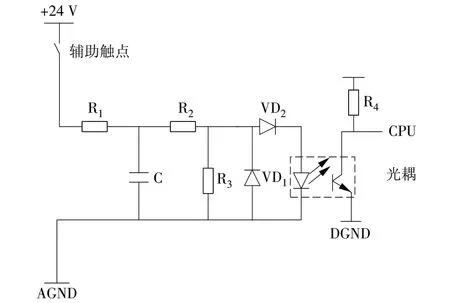
图2 开关量输入电路Fig.2 Switch quantity input circuit

图3 模拟量输入电路Fig.3 Analog quantity input circuit
电路结构中每个单通道都是由单输入模拟通道及采样/保持(S/H)电路组成,每个通道的独立性使电路中数据的转换及采集可以同步进行且互不影响,从而在交/直流(A/D)转换器具有相同的转换频率时各通道有较高的转换速率。
2.2 中央控制模块
为保证系统具备较高的数据信息处理速度及良好的数据传输时效性,本文将采用TMS320C5402型数字信号处理器(DSP)及改进型哈佛结构,如图4所示。其中包含CPU、程序地址总线(PAB)、程序总线(PB)、数据地址总线(DAB)、数据总线(DB)。

图4 改进型哈佛结构Fig.4 Improved Harvard Architecture
TMS320C5402 芯片的最小工作系统由电源、时钟、复位、存储器接口等电路构成。采用内部振荡器方式的时钟电路如图5所示。采用具有监测功能的MAX706R 芯片来完成DSP 的自动复位。自动复位电路如图6所示。
2.3 通信模块

图5 时钟电路Fig.5 Clock circuit
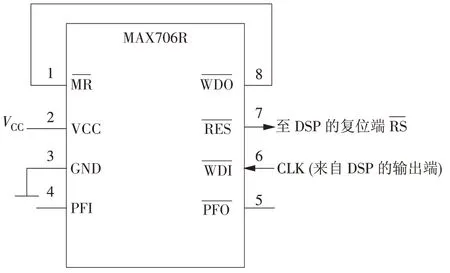
图6 自动复位电路Fig.6 Automatic reset circuit
由于环网柜的运行受到环境的影响,并且基于数据采集处理的特点及监测系统功能实现的要求,远程通信应具备以下功能:(1)允许多机同时主动上传数据;(2)可以实现数据的大量上传;(3)具有可靠的通信及电磁兼容能力,以及较高的网络抗干扰能力;(4)良好的系统兼容性;(5)可与变电站自动化系统实现无缝对接。在环网柜的状态监测系统中通信RS-485 总线应用较为广泛,然而这种传输方式所应用的主从式通信可能会影响数据传输的时效性[13]。因此,本文通信方式选用4G/5G 通信模块,使整个监测系统性能更强,功能更加完善。
2.4 人机交互模块
基于物联网的环网柜监测系统所要监测的参数较多,不仅要求人机交互模块对所得数据及曲线能够实时显示,还需动态地实时更新显示界面,因此本文选择TCM-A0902 液晶显示模块。DSP 模块与TCM-A0902的连接如图7所示。
3 系统软件设计
3.1 系统实现

图7 DSP模块与TCM-A0902的连接Fig.7 Connection between DSP module and TCM-A0902
本文所设计的基于物联网的环网柜监测系统是通过优先级的调度机制来实现运行的。整个系统中各个软件需实现的功能包括数据采集、数据处理、菜单操作、本地录波、故障判断与预警及远程通信。软件系统流程如图8 所示,系统的主程序流程如图9所示。

图8 软件系统流程Fig.8 Flow of the system
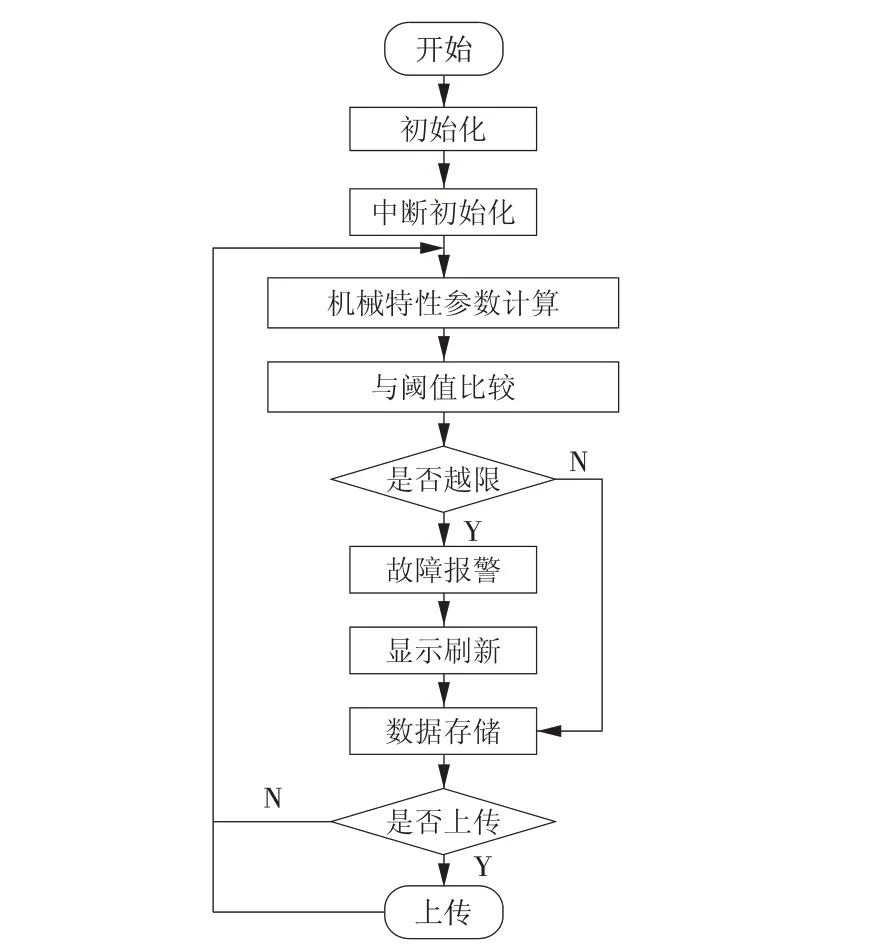
图9 系统主程序流程Fig.9 Flow of the main program in the system
3.2 数据采集、通信程序
系统通过中断控制实现数据采集,使每个序列转换结构可以产生中断请求。中断服务程序的功能是实现数/模信号的转换,将分/合闸线圈的电流及振动等模拟信号变为数字信号,中断程序流程如图10 所示。通信由4G/5G 通信模块完成,先通过DSP 发出数据信号,同时等待上位机接收到信号后给出反馈信号并做好接收数据信息的准备,当DSP收到上位机的应答信号后准备进行数据传输,表明握手成功[14-18]。在进行数据传输之前相关程序需进行初始化操作;数据传输过程中,在相应的数据缓冲区提取数据并送入发送器中,准备发送数据;在数据传输完成后进行计数及检验,即对采样点中的数据检查是否全部发送完毕,并检验传输的数据是否有错,若有错则重新发送。通信程序流程如图11所示。
3.3 行程-时间分析子程序

图10 中断程序流程Fig.10 Flow of the interrupt program

图11 通信程序流程Fig.11 Communication program flow
环网柜机械特性的行程-时间分析是通过旋转编码器输出的脉冲,得到触头的整个位移信号,并在主站内画出点线进而得到分/合闸曲线图,再截取曲线图的中间部分来计算触头行程、开距、超行程以及平均分/合闸速度等参数。行程-时间分析子程序流程如图12所示。
3.4 分/合闸线圈电流分析子程序
要获取环网柜线圈的分/合闸电流数据,需要得知分/合闸电流信号中特别的时间点,并通过系统计算得到分闸及合闸的时间,同时需要确认断路器的工作状态是否正常。分/合闸线圈电流处理子程序如图13所示。
3.5 系统测试

图12 行程-时间分析子程序流程Fig.12 Flow of the travel-time analysis subprogram
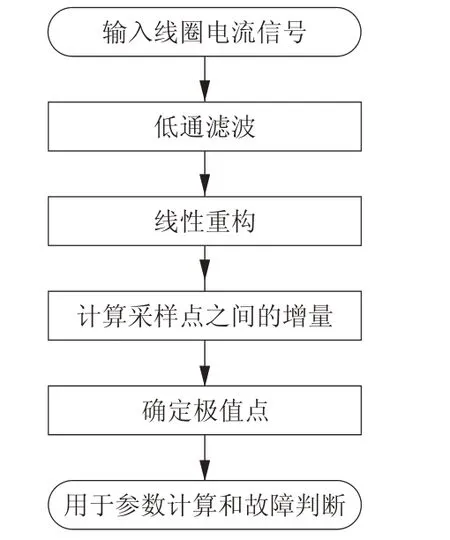
图13 分/合闸线圈电流处理子程序Fig.13 Processing subprogram of the opening/closing coil current
系统软、硬件设计完成之后需对系统进行测试,检测系统是否正常运行且能否实现各个模块的功能。环网柜的分/合闸线圈机械特性检测软件界面如图14 所示。分心线圈中电流的分/合闸可经过仿真分析得到。通过对分散包络导数取绝对值的方法可以很清晰地得到电流信号的突变点。电流信号仿真波形如图15所示。

图14 环网柜分/合闸线圈机械特性检测软件界面Fig.14 Interface of the opening/closing coil mechanical characteristics detecting software in the ring network cabinet

图15 电流信号仿真波形Fig.15 Simulated waveform of current signals
从图15b 能够清晰地看出分/合闸发生的时间点,通过求得分/合闸电流信号分散包络统计的导数极大值的方法得到电流突变的时间点是非常有效果的方法,完全能够实现设计所要求的功能。行程-时间监测采用脉冲数为2 000、转速为6 000 r/min 的增量式旋转编码器,经过测试试验得到环网柜分/合闸旋转角度为38°,编码器经过1 次分/合闸操作输出212 个脉冲,因此可以计算出分/合闸的位移分别为s1和s0,测量精度为0.38,进一步结合分/合闸电流曲线计算出分闸时刻t1,结合合闸曲线计算出合闸时刻t2,计算得到分闸速度为v1=s1/t1,合闸速度为v0=s0/t0,与机械特性仪测量值相比较,通过分析计算得到环网柜机械特性参数见表1。

表1 机械特性试验数据Tab.1 Mechanical characteristics test data
4 结束语
本文对基于物联网的环网柜在线监测技术进行了研究,对系统进行了软、硬件设计并分析了各模块设计流程。研究了各模块实现电路及相关程序。同时通过改造操作机构的结构设计,利用旋转编码器进行试验验证,再结合分/合闸线圈电流曲线计算得到环网柜机械特性参数在允许范围内,可较好体现环网柜分/合闸过程,从而验证了此设计方案的正确性。