PMP技术中检测饱和及校正相位的算法研究
2021-02-05李娜,牛帅
李 娜,牛 帅
(1.长治医学院 生物医学工程系,山西 长治 046000;2.长治医学院附属和平医院,山西 长治 046000)
相位测量轮廓术[1](PMP)是非接触式测量物体三维形貌的一种技术,由于其在测量过程中,具有不需要额外附加设备且扫描速率高等优势,因此其应用遍及多个领域[2]。但是在测量过程中,三维重建的精确度会受噪声[3]、Gamma畸变[3]、PMP系统的量化[4]、饱和[5]等因素影响。针对饱和因素对重建相位的影响,很多学者做了大量研究分析。胡等人[5]基于正弦曲线中饱和像素点的具体情况,提出利用正弦曲线中未发生饱和的像素点进行相位计算;Guo等人[6]采用Hough变换投票的方法确定用于三维重建的相位;赵等人[7]通过建立正弦曲线中每个像素点满足的强度值模型,从而得到相位值。本文首先提出一种检测物体表面饱和区域的方法,该方法通过检测纯色图像与N帧图像作差得到的检测图像中每个像素点的值,从而检测饱和区域;同时,针对平面型扫描物体,提出一种校正饱和区域相位的算法,该算法利用与饱和像素点邻近的非饱和像素点的相位进行修复,最终达到降低误差的目的。
1 饱和误差分析
由于被测量物体表面局部区域反射率较大,在采用PMP技术进行三维重建时,导致该区域像素点的强度值超出相机的最大强度范围;与此同时,相机将该区域像素值限为自身的最大强度值,即该区域图像发生饱和。图1是相机获取的某帧图像中第320列像素点的强度值。从图中分析可知,受饱和因素的影响,相机捕获的图像强度值无法真实反映被测物体表面的信息,采用PMP技术重建物体时,影响重建效果。

图1 相机捕获的某帧图片第320列的强度值
(1)
针对饱和像素点而言,其相位误差表示为[7]:
(2)
2 物体表面饱和区域的检测算法
由PMP重建技术可知,投影仪投射到物体表面的N张光栅图中,任一像素点的最大灰度值为AP+BP,且Ap、Bp满足下式:
AP+BP=2b
.
(3)
其中,2b表示灰度等级。
采用PMP技术三维重建,投射相移量为2π/N的N张光栅图片及灰度值为2b的纯色图片扫描物体。对于任一像素点而言,其关系可表示为:
(4)
基于式(4),可采用纯色图像与任一帧图像作差的方式检测被扫描物体发生饱和的区域,具体步骤如下:1)投射具有一定规律的正弦光栅及固定强度值的纯色图片扫描被测物体,其强度分别满足式(3);同步地,相机捕获含有被扫描物体深度信息的两种图像。2)将携带物体信息的纯色图像与光栅图像逐帧作差,得到检测图像;之后,查找检测图像中像素点的强度值;若其为0,则该区域发生饱和。
3 物体表面饱和区域相位校正的算法
在PMP重建过程中,对于局部发生饱和的平面型物体,可根据与饱和区域像素点邻近的非饱和像素点的相位进行校正,具体算法如下:
1) 针对被测物体顶部发生饱和的区域,校正的相位为:
.
(5)
2) 针对被测物体底部区域存在饱和时,校正的相位为:

.
(6)
3) 若被扫描物体中间区域发生饱和,校正的相位为:

.
(7)
以上(5)-(7)三式中,φ(i,t)表示发生饱和像素点的相位;φ(i±m1,t)、φ(i±m2,t)表示与像素点邻近的非饱和像素点的相位值。
4 实验仿真
为了验证本文检测饱和及修复相位算法的有效性,以投射图片数量N=4,频率f=1,Ap=Bp=127.5进行实验仿真。图2(a)为模拟相机捕获的4张图像,图2(b)为第320列像素点的正弦波曲线。从图2(a)、(b)可知,4帧图片中不同位置的像素点均存在饱和现象,饱和现象在4帧图片中体现为该区域颜色最亮;在正弦曲线中体现为正弦曲线波峰平滑,即正弦曲线发生变形。

图2 相机获取的4帧图片
图3(a)是相机获取的纯色图像与正弦波图像作差后的检测图像;图3(b)是该检测图像中第320列像素点的强度。与图2(a)、(b)结合分析可知,若某帧图片局部区域存在饱和,则检测图像中该区域颜色最暗,对应该区域像素点强度值均为0。

图3 纯色图像与正弦光栅图像作差后的检测图像
图4是第320列像素点的相位误差,其中实线、虚线分别表示未校正及采用本文算法校正后的相位误差。从图中看出,采用本文算法校正后,很大程度上减小了相位误差。
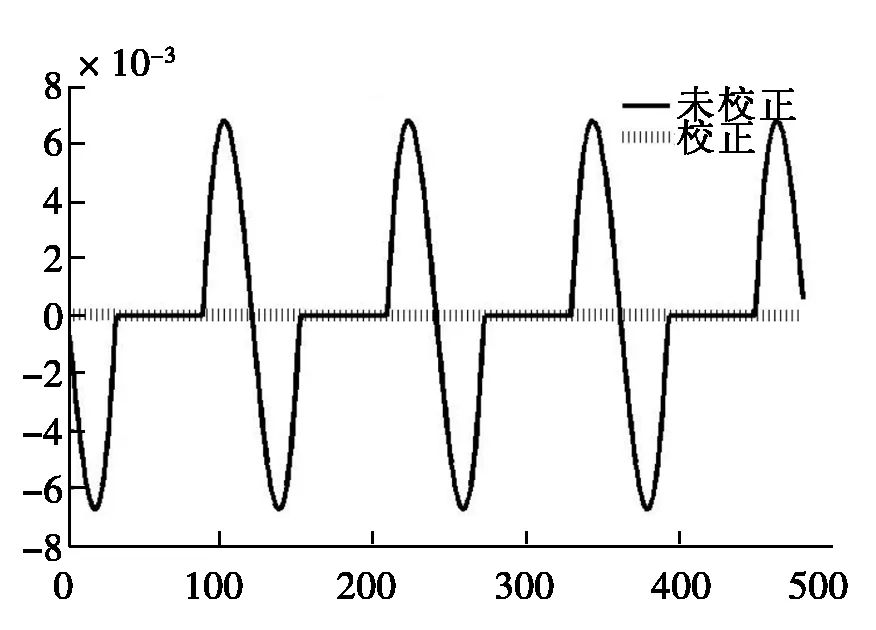
图4 320列像素点的相位误差
表1是频率f=1,图片数量N=4、7以及图片数量N=4,频率f=2、4时计算得到的误差均方根值。从表1中可以看出,采用本文的算法达到了校正相位误差的目的。

表1 对比不同算法的相位误差的均方根
5 结论
采用PMP技术三维重建时,由于物体表面反射率较大,物体局部区域会产生饱和,引起相位误差,从而导致三维重建无法反映物体的真实深度信息。本文首先分析了饱和引起的相位重建误差;其次提出一种检测物体饱和区域的方法,该方法首先将纯色图像与光栅图像作差得到检测图像,此后,检测并判断该图像中各像素点,从而判定饱和区域;同时,针对平面型扫描物体,提出一种校正饱和区相位的算法,该算法利用与饱和像素点邻近的非饱和像素点的相位进行修复,从而提高三维重建物体的精准度。但是,在实际测量系统中,被扫描物体并不仅限于平面型物体,因此,本文校正算法存在一定的局限,后续将对其它类型物体的相位修复进一步深入研究。
