基于STM32 单片机的方形喷洒域装置的设计与试验
2021-02-05刘佳邓健杨启良秦伟
刘佳,邓健,杨启良*,秦伟
(1.昆明理工大学农业与食品学院,云南 昆明 650500;2.新疆大学机械工程学院,新疆 乌鲁木齐 830047)
在方形农田使用圆形喷洒域喷头进行喷灌,单喷头喷洒时会产生漏喷、界外喷洒,导致水资源浪费[1-2],而多喷头组合喷洒时易产生水量重叠,造成喷灌不均匀[3-5]。2 种方式的喷洒面都难以贴合覆盖地块边角区域。研制稳定可靠、方形程度标准的喷灌装置具有现实意义。
BENJAMIN[6]通过连杆机构调节碎水钉来改变喷头射程,采用仿形齿轮调节喷头转速,从而实现方形区域的喷洒,但可靠性不高。OHAYON 等[7]通过环形槽调节柱塞式流量调节阀的开度,进而改变流量,以喷洒出方形区域,但这种结构较为复杂。韩文霆等[8]通过理论分析,给出了方形喷洒域喷头的射程、流量和转速应服从的变化规律和计算公式。孟秦倩等[9]提出喷头在空间连杆机构作用下实现双圆周复合运动的变圆心喷洒的结构构想,理论上可实现近似方形的喷洒,但可操作性较差,成本高。邢浩男等[10]采用凸轮与连杆机构控制喷头仰角变化,凸轮滚子与凸轮阻力变化控制转速,设计出方形喷洒域喷灌装置,但由于对凸轮内壁微小凸起的加工要求较高,容易发生磨损,故难以推广应用。王正中等[11]通过优化出水口处上下动静片的形状,控制喷头流量,产生周期性变化,实现方形区域的喷洒,水头损失比优化前降低了25.8%,方形系数提高到86.89%,但喷灌面的方形系数仍有待提高。
针对以上问题,基于文献[10]中不同区域面积匹配不同喷头转速的计算理论,笔者提出了等量函数模型,并用单片机控制喷头转动的方法,提高喷灌的均匀度,同时利用已测射程反求凸轮轮廓,保证方形喷洒域的标准程度,设计了一种可适用于方形喷洒的新型喷灌装置,对装置的方形系数、喷灌均匀度、界面喷洒等指标进行了评价,旨在提升方形区域喷洒效率和减少水资源的浪费。
1 方形喷洒域喷灌装置的结构与工作原理
1.1 整机结构
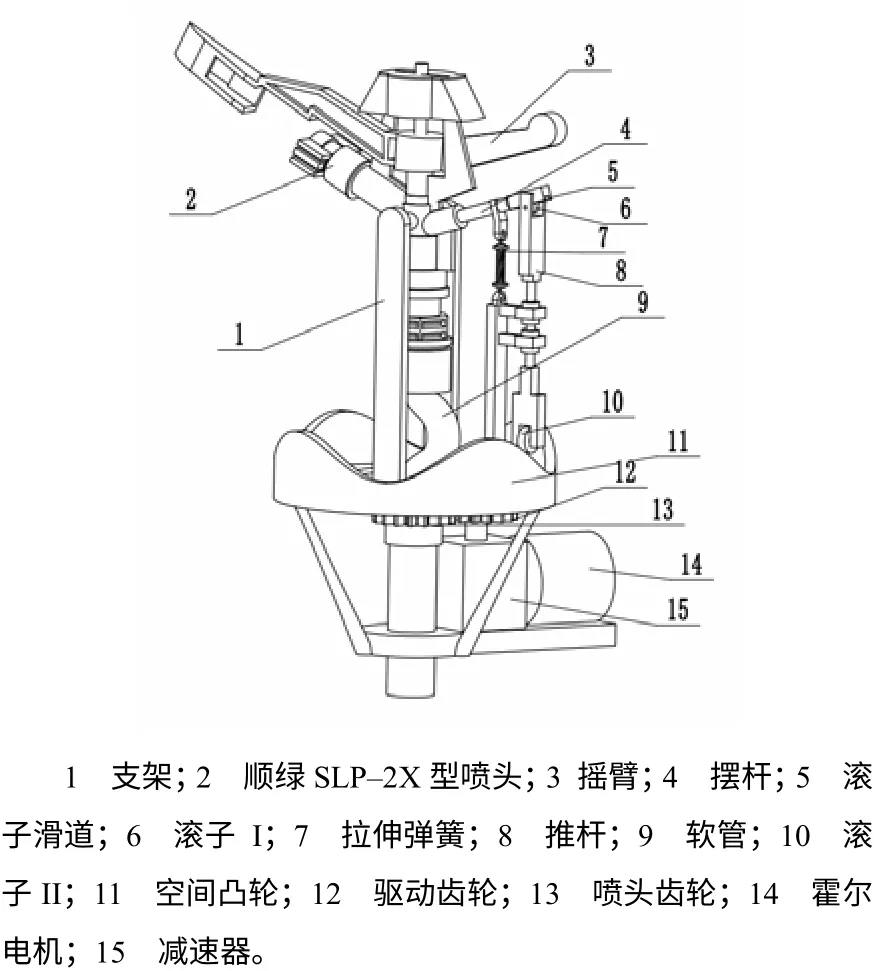
图1 方形喷洒域喷灌装置的结构Fig.1 Structure of square spray field irrigation device
方形喷洒域装置的结构如图1 所示。由控制模块(单片机、驱动板、霍尔电机构成)、工作模块(底座、支架、铰链构成、电机齿轮、喷头齿轮、软管、摆杆、拉伸弹簧、滚子滑道、滚子、顶杆、空间凸轮等)和喷头等3 大部分组成。霍尔电机输出轴减速比 30∶1,减速器减速比 32∶1;摆杆长度85 mm,滚子I 直径6.0 mm,滚子II 直径8.0 mm,电机齿轮、喷头齿轮齿数17;顺绿SLP-2X 喷头射程(仰角24°)11.5 m,喷嘴直径5.0 mm,工作压力0.20 MPa。
1.2 工作原理
装置下端设置喷头接口,软管可保证喷头仰角可调,喷头主体通过铰链与支架铰接,空间凸轮引导顶杆一端的滚子沿轮廓转动,并使推杆发生往复直线运动。该过程中伸缩弹簧使得顶杆末端的滚子紧贴空间凸轮,单片机控制电机产生变速转动,通过齿轮带动喷头主体转动,并带动推杆沿空间凸轮移动,同时凸轮使得推杆产生直线运动,并使摆杆发生摆动,从而喷洒出方形区域。
2 关键部件的设计
根据喷灌的农艺特点,方形喷洒域喷灌装置应满足:①单喷头射程误差≤5%,喷灌能覆盖 19 m×19 m 的方形区域;②喷灌均匀系数≥75%,方形程度≥90%;③界外喷洒≤|10%|;④喷灌过程稳定可靠。喷洒区域和形状[11-12]是由射程变化规律决定的,即调节喷头的仰角、转速可改变喷洒射程和不同区域水量分布。若需实现方形域喷洒,射程变化应符合方形边界函数[13];若需实现喷洒过程均匀,依据喷头在旋转过程中喷洒单位面积的水量相等原则,笔者提出等量喷洒函数模型,即流量关于时间的微分与射程关于扇形面积的微分(即扇形微元的面积)之比是常数。

联立式(1)和式(2),可得式(3),即

式中:Q 为喷头的流量(mL/s);dt 为喷头转动过程中对时间的微分(s);R(α)为喷头射程(扇形半径,m);dl 为扇形弧长的微分(m); v 为线速度(m/s)。
2.1 空间凸轮的设计
2.1.1 喷头仰角变化与推杆位移变化的关系
在方形域喷洒过程中,喷头每旋转360°为1 个旋转周期,每个旋转周期包括4 个喷头仰角变化周期、4 个推杆运动变化周期和4 个空间凸轮轮廓变化周期;因此,仅探究喷头0°~90°的旋转即可代替整体。采用黄元申[14]的喷头仰角变化速度和喷头旋转速度的直线关系式,更易于加工制作凸轮,即α=1.5β-6。α 为喷头旋转角度,β 为喷头仰角。
当喷头仰角变化时,喷头旋转角度和推杆位移的变化如表1 所示。
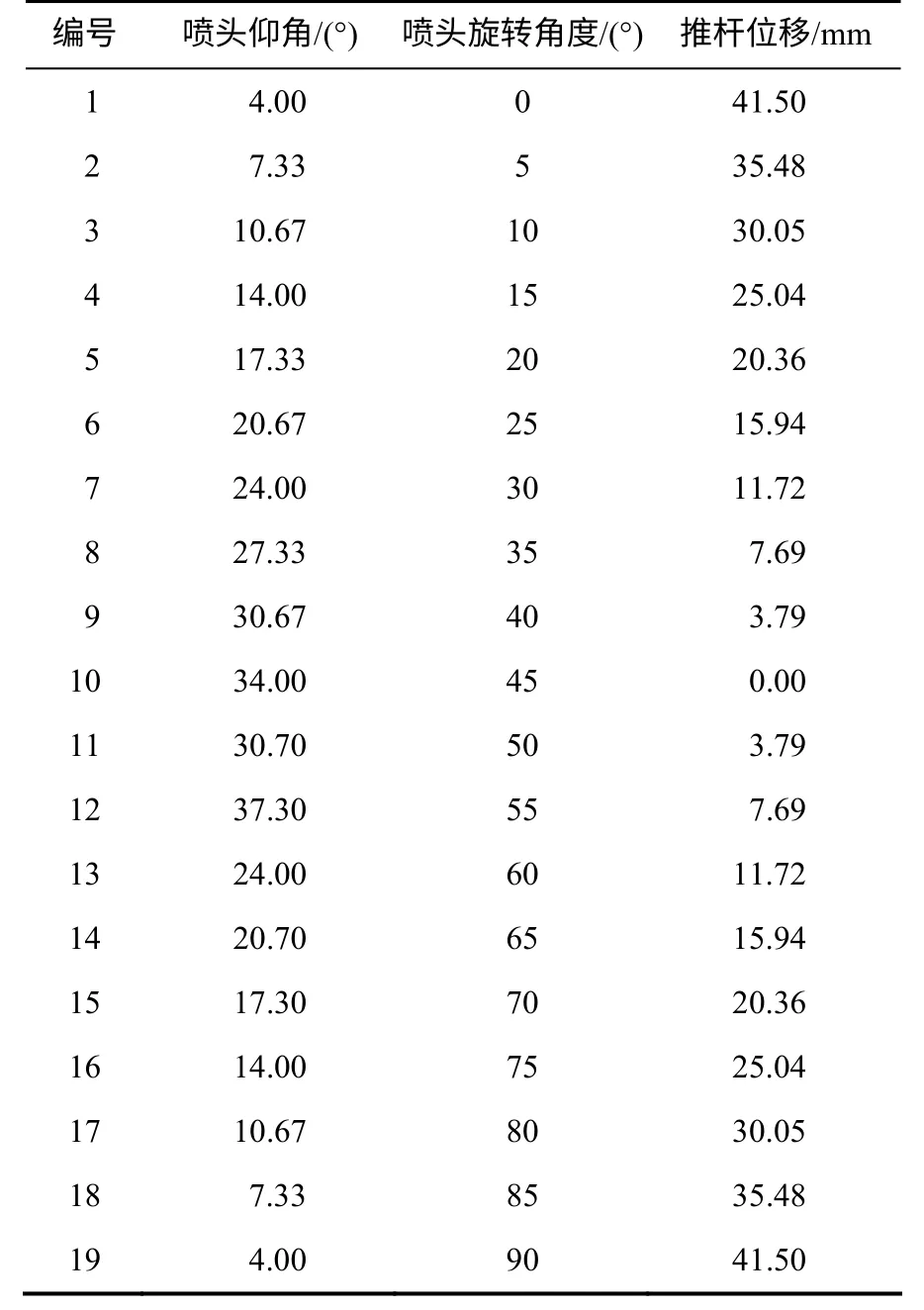
表1 喷头仰角与推杆位移间的参数变化Table 1 Parameters change between nozzle elevation angle and push rod displacement
2.1.2 射程与旋转角度的关系
图2 结果表明,4°仰角下的水量分布分别在射程3.00 m 和8.00 m 处出现峰值,整体波动较大,而其他角度下的水量分布较为平稳,尤其是 34°仰角下的水量分布随射程增加而逐步递减,表现出的差异性较小。水量喷头最远射程的平均喷灌强度和最近射程的分别为1.65 mm/h 和3.54 mm/h,其最近射程的平均喷灌强度约为最远射程的2.15 倍。
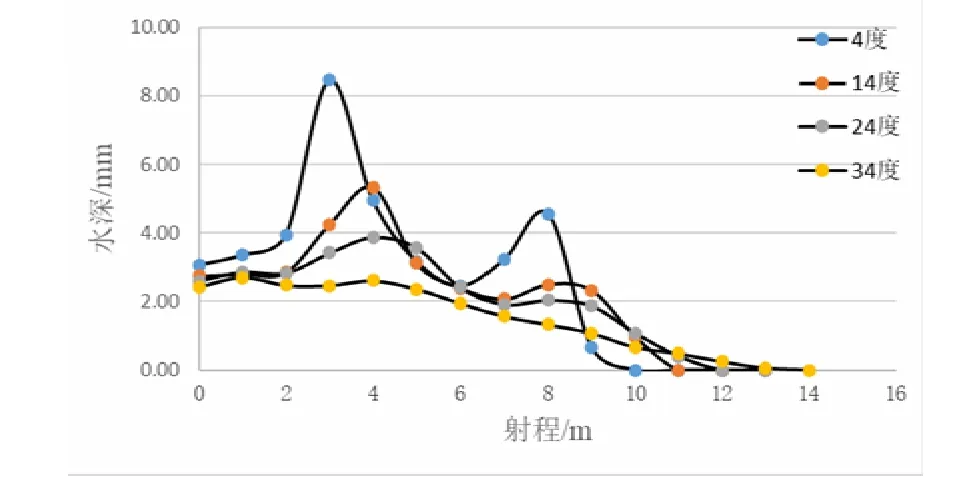
图2 不同喷头角度的水量分布Fig.2 Distribution curve of water quantity at different nozzle angles
根据实际喷洒射程计算出的理论射程误差小于5%(表2),符合设计要求。
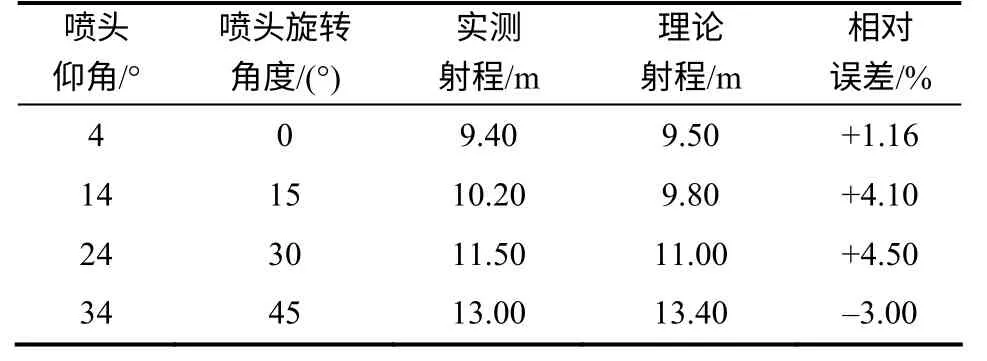
表2 喷头实际射程与理论射程误差的对比Table 2 Comparison of actual and theoretical range error of sprinkler
2.1.3 喷头仰角、摆杆和推杆的运动关系
对推杆施加约束,保证该构件竖直平面上有 1个自由度,摆杆和喷头受到铰链的约束,同样也只有1 个自由度,摆杆末端的滚子滑道保证在受到推杆力的同时,能够使滚子Ⅰ沿滑道滚动(图3);因此,推杆往复直线运动使得摆杆和喷头在一定角度内发生往复转动,其中喷头和摆杆之间的角度固定为135°,且各自变化范围分别是 4°~34°、139°~169°,推杆的位移为0~41.60 mm。
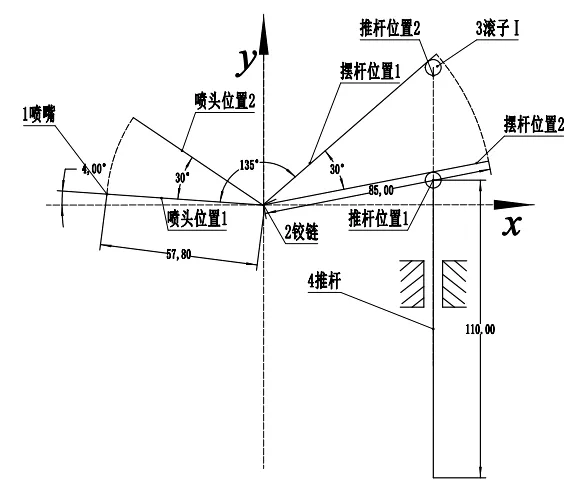
图3 仰角、摆杆和推杆运动的始末位置Fig.3 Starting and ending position of elevation angle, swing rod and putter
2.1.4 凸轮轮廓设计方案
根据表 2,将盘形凸轮转动规律应用在空间凸轮上,并采用SolidWorks 进行三维建模。喷头仰角从 4°至 34°变化,推杆位移从 41.60 mm 至 0 mm 变化,凸轮工作阶段为回程,相反角度变化为推程,采用包覆-蚀雕命令将平面轮廓线刻画到拉伸凸台上,该凸轮直径130 mm,宽度5 mm,如图4 所示。
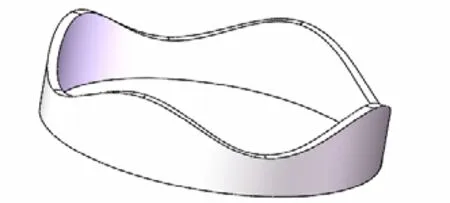
图4 空间凸轮的轮廓Fig.4 Contour of spatial cam
2.2 单片机控制模块的设计
2.2.1 喷头转速规律对比分析
由公式(3)可知,喷头转速与1/R2(α)成正比,其中R(α)为喷头转动相同角度α 划分相应喷洒域的角度平分线,而文献[10]中喷头旋转速度是由不同喷洒域面积之比确定的。喷洒域1、2、3 是由喷头每旋转α 喷洒形成,如图5 所示。
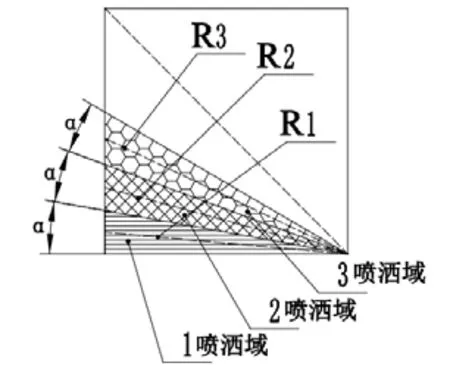
图5 喷洒域的划分Fig.5 Division of spraying field
对比本研究与文献[10]计算得出的喷头转速参数,发现转速误差在2%以下(表3),因此,等量喷洒函数模型是可靠的。
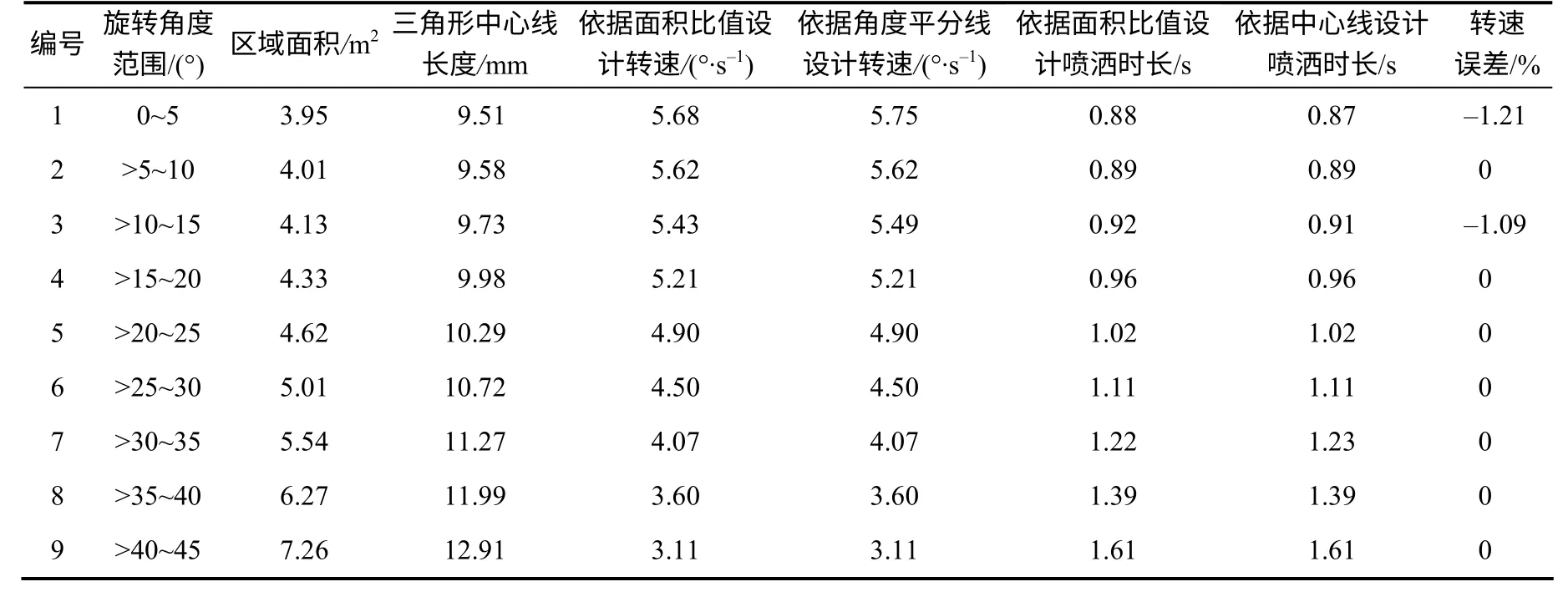
表3 各区域的设计参数及其误差Table 3 Design parameters and errors of each region
2.2.2 检测与脉冲控制模块
依据霍尔减速电机具有减速齿轮组和速度反馈的优点,选择型号GM37-545S 霍尔减速电机,其中调速功能由控制线和微控制线信号连接实现。电机驱动是经过一系列电路后响应输出的,其输出速度信息是STM32F103zet6 芯片为控制系统经驱动板放大的信号。采用的监测和脉冲控制模块由STM32F103zet6 芯片、YSMDRBD1014 驱动板、GM37-545S 霍尔减速电机、多级减速齿轮组和姿态传感器组成,其中电机的额定电压为DC 24 V,最大功率83 W,JY901 角度姿态传感器与STM32 单片机连接,用于检测喷头仰角。驱动板电路如图6 所示。
2.2.3 交互设计
STM32 单片机通过 USB232 串口在 Window7 操作系统的电脑运行,运行显示界面在 Visual Studio 2015 中的MFC 使用C++语言开发,下位机程序在Keil uVision5 中使用C 语言开发,最后经过调试,使上位机和下位机产生通讯,程序流程如图7 所示。
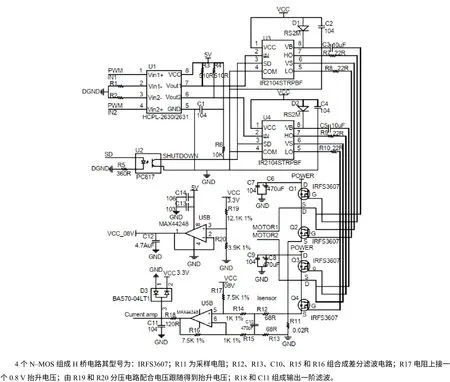
图6 YSMDRBD1014 驱动板电路Fig.6 Circuit schematics of YSMDRBD1014 driver board
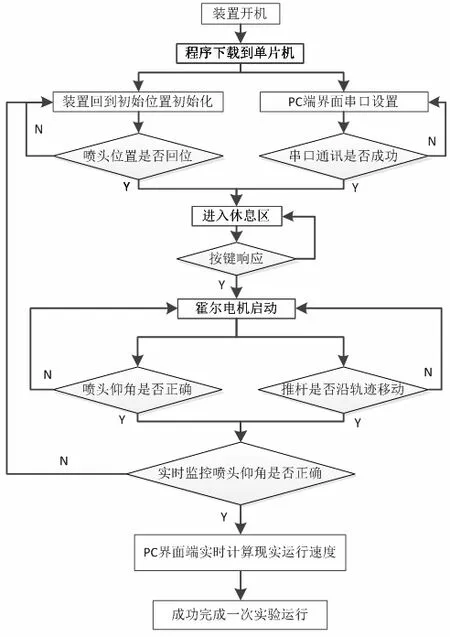
图7 方形喷洒域喷灌装置测试流程Fig.7 Test flow chart of square spray field irrigation device
3 喷灌装置的性能验证
试验在昆明理工大学进行。试验条件和方法参照《美国农业工程师学会喷灌分布测试标准》和《农业灌溉设备喷头水量分布特性和试验方法》,设备主要由PLC(深圳精汇川电器有限公司,EC10- 1410-BRA 型),变频器(南京欧陆电器股份有限公司,EV510型),水泵,储水槽,远传压力表,流量计,喷头组成。工作压力0.20 MPa,流量1.50 m3/h,压力表精度0.4 级,流量计精度0.5 级,量筒高142.00 mm、口径107.00 mm。装置的其余构件通过3D 打印和车削加工制作,单片机驱动板、电机以及供电电源作防水处理。由于喷头圆形和方形喷洒区域存在对称特征,且受场地的限制,故简化试验方案:1) 测量不同仰角水量分布的量筒采用1 m 等间距的径向布置,且从喷头向外引出3 条射线,角度相隔60°;2)为对比圆形、方形喷洒域的水量分布,量筒采用1 m 间距的0°~45°三角形网格布置,如图8 所示。
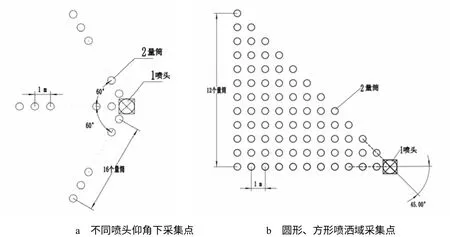
图8 采集点与喷头相对位置分布Fig.8 Distribution map of relative position of collection point and sprinkler
采用韩文霆[15]提出的方形系数评价喷洒域方形程度。
衡量喷灌均匀程度采用克里斯琴森均匀系数η。

式中:η 为界外喷洒区域所占的百分比;S1为19 m×19 m 方形喷洒域的面积(m2);S2为喷头的实际喷洒面积(m2)。
喷头旋转0°~90°过程中,依据喷头射程与旋转角度的关系拟合的方程如图9、式(5)所示。结合式(3),可得喷头转速式(6)。


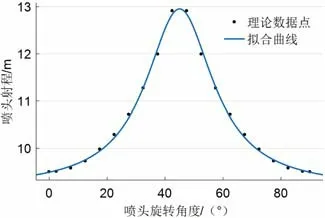
图9 喷头转角与射程拟合Fig.9 Fitting diagram of nozzle angle and range
喷头圆形与方形喷洒域的水量分布如图 10 和表4 所示。
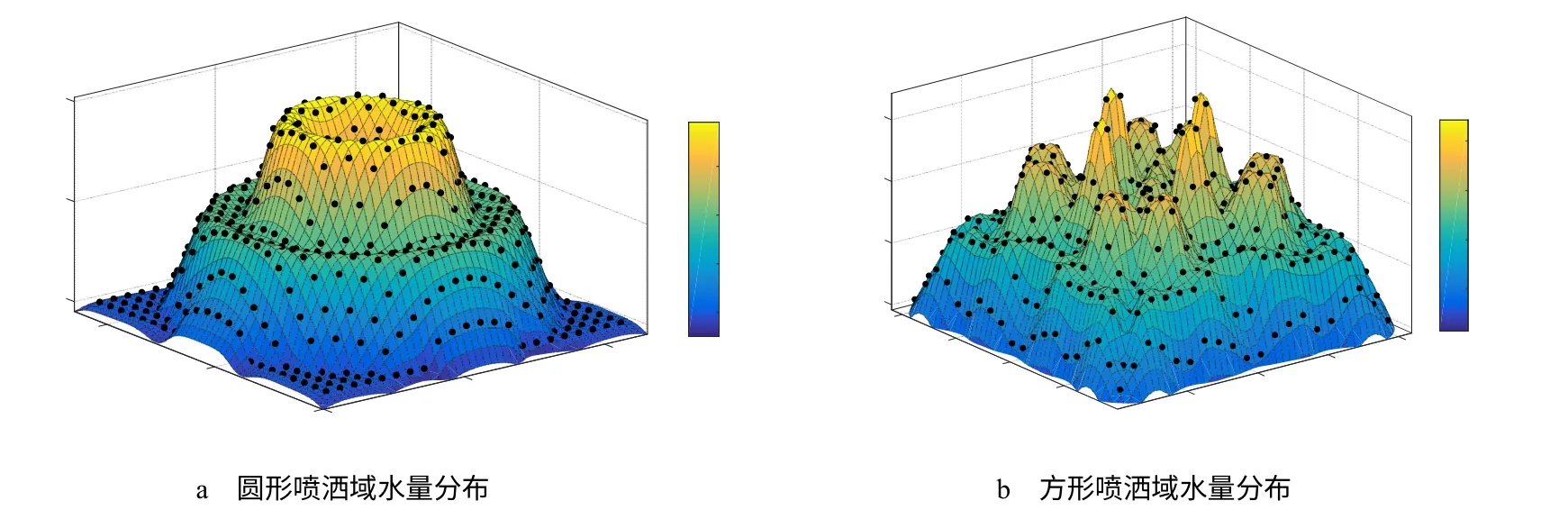
图10 试验区域喷洒域水量分布Fig.10 Water distribution map of test area

表4 方形和圆形喷洒域喷灌性能的对比Table 4 Comparison of test data of sprinkler irrigation in square and round sprinkler fields
从表4 可知,装置的方形喷洒域的方形系数达到94.55%,喷灌均匀度达到86.70%,比《喷灌工程技术规范》[16]中的喷灌标准高 15.60%,与圆形喷洒域均匀系数86.30%相近,表明提高方形喷洒域方形程度的同时,并没有降低喷灌均匀度。覆盖19 m×19 m 方形喷洒域时,装置喷洒覆盖区域面积为332.56 m2,超喷和漏喷面积为28.44 m2,产生7.88%的界外喷洒;而采用圆形喷洒覆盖整个方形区域造成了57.08%的界外喷洒;因此,装置提高了喷灌方形程度,保证了喷灌均匀程度,因而可减少水资源的浪费。
4 结论与讨论
所设计的方形喷洒域装置以单片机为控制核心,调节喷头转速,获得了较高的喷灌均匀度。结构上采用空间凸轮与滚子发生接触,通过连杆传动调节喷头仰角,进而喷洒出方形区域,能实现 19 m×19 m 方形区域的喷洒,方形系数可达94.55%,喷灌均匀度达到86.70%,比《喷灌工程技术规范》中的不低于75%的规定高15.60%;界外面积喷洒与标准方形相比漏喷7.88%,而圆形喷头比标准方形将会增加57.08%的超喷,减少了水资源的浪费。
装置的单喷头方形系数相比文献[10]的92.06%和文献[17]的77.60%分别高2.70%和29.45%,喷洒形状更接近标准正方形。虽然喷头会产生7.88%的漏喷,但相比圆形喷头57.08%面积的超喷,其优势是明显的。喷头在 14°~34°较大仰角喷洒时水量分布较为均匀,但在4°~14°时会产生水量集中,导致从中心点到正方形边长线上2~4 m 出现水量峰值,使得整体水量分布不均。装置采用单片机等控制元器件,可保证变量喷洒的精度[18-19],适用于搭载移动设备进行温室多处定点喷灌,减少喷头布置的密集程度,降低成本,喷洒域与地块形状更加贴合[20]。与采用动静片的喷头相比,可进行不同长宽比的矩形面积喷洒或不规则边界喷洒。
本研究中,空间凸轮是3D 打印材料制成的,确定轮廓后喷洒边界也随之确定,若采用柔性凸轮[21]可通过柔性凸轮轮廓的变化调节喷头仰角;当该喷灌装置搭载可移动设备时,可根据不同的地形改变不同的形状,以喷洒出适合的区域。