一种异物清除作业机器人机构的优化设计
2021-02-04王颂李锐海刘旭景凤仁刘爱华
王颂,李锐海,刘旭,景凤仁,刘爱华
(1.南方电网科学研究院有限责任公司,广东 广州 510663;2.中国科学院沈阳自动化研究所,辽宁 沈阳 110016;3.中国科学院机器人与智能制造创新研究院,辽宁 沈阳 110169)
电网作为支撑国民经济发展的支柱产业,在当今社会发展中发挥着不可替代的作用。通常导线与导线之间都留有固定的安全间距,以保障架空输电线路安全运行。如果在导线之间存在空气以外的非绝缘物体,导线之间通过这种物体放电,造成线与线之间短路,变电站开关跳闸。清除输电线路上的异物目前主要依靠停电后人工上线摘除,人工作业程序复杂,劳动强度大,安全可靠性低。将机器人应用于输电线路的异物清除作业,可以降低劳动强度和危险性,提高作业的自动化程度。
国内外对于电力巡检与作业机器人的研究开始于20世纪80年代,世界上第1台高压线路巡检机器人在1988年由日本东京电力公司研制[1],此后日本、加拿大、美国等各国开展了输电线路巡检机器人的研究[2-6]。20世纪90年代,中国科学院沈阳自动化研究所和武汉大学等多家研究机构开始进行一档内、可跨越直线杆塔和耐张杆塔的输电线路巡检机器人研究[7-18]。
针对输电线路上的异物清除问题,太原供电公司、国网山东省电力公司电力研究院、莆田电业局、国网江苏省电力公司电力科学研究院等开展了输电线路异物清除作业方法和装置的研究[19-23]。本文在国内外关于输电线路巡检机器人和异物清除作业机器人研究的基础上,优化设计一种输电线路异物清除机器人系统,介绍这种机器人系统的结构,对机器人的运动学进行分析和仿真,最后在实验室建立输电线路的模拟环境,对机器人的运动与作业过程进行实验验证。
1 异物清除作业机器人机构设计
1.1 作业环境
架空线路主要由导线、架空地线、绝缘子串、杆塔、金具、接地装置及杆塔基础等部分组成。导线是架空线路的主要组成部分,其功能主要是传导电流、输送电能;架空地线通常安装于杆塔上端,用于引导雷电,对整个输电线路起保护作用。异物清除机器人主要针对500 kV输电线路的环境设计,该输电线路的地线型号为LGJ-95/55,防振锤型号为FD-3。可清除的异物为可电锯切割和电热清除的异物,如塑料布、风筝线和广告布等。
1.2 机器人组成
如图1所示,机器人由本体1和作业工具2两部分组成,机器人本体采用轮式移动结构沿输电线路行走。作业工具2包括举升机构3、电锯清除机构4及电热清除机构5,举升机构3的末端安装电锯清除工具4和电热清除工具5。
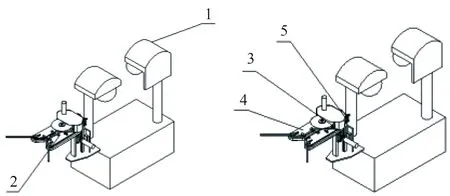
图1 机器人三维结构图Fig.1 3D structure of the robot
电锯清除机构4主要包括左夹持臂、右夹持臂、左导向架、右导向架和电锯切割装置。左、右夹持臂结构相同,采用电动机驱动同步带传动方式实现对异物的夹紧和导出,再利用电锯切割装置对异物进行切割。
电热清除机构5利用电热合金丝材料的电热圈熔断异物,当电热合金丝通过电流时,可以很快产生热量使电热合金丝升温,达到熔解尼龙等塑料材料的温度,可靠地处理可燃异物。
1.3 异物清除工具设计
电锯清除工具4及电热清除工具5的结构如图2所示。
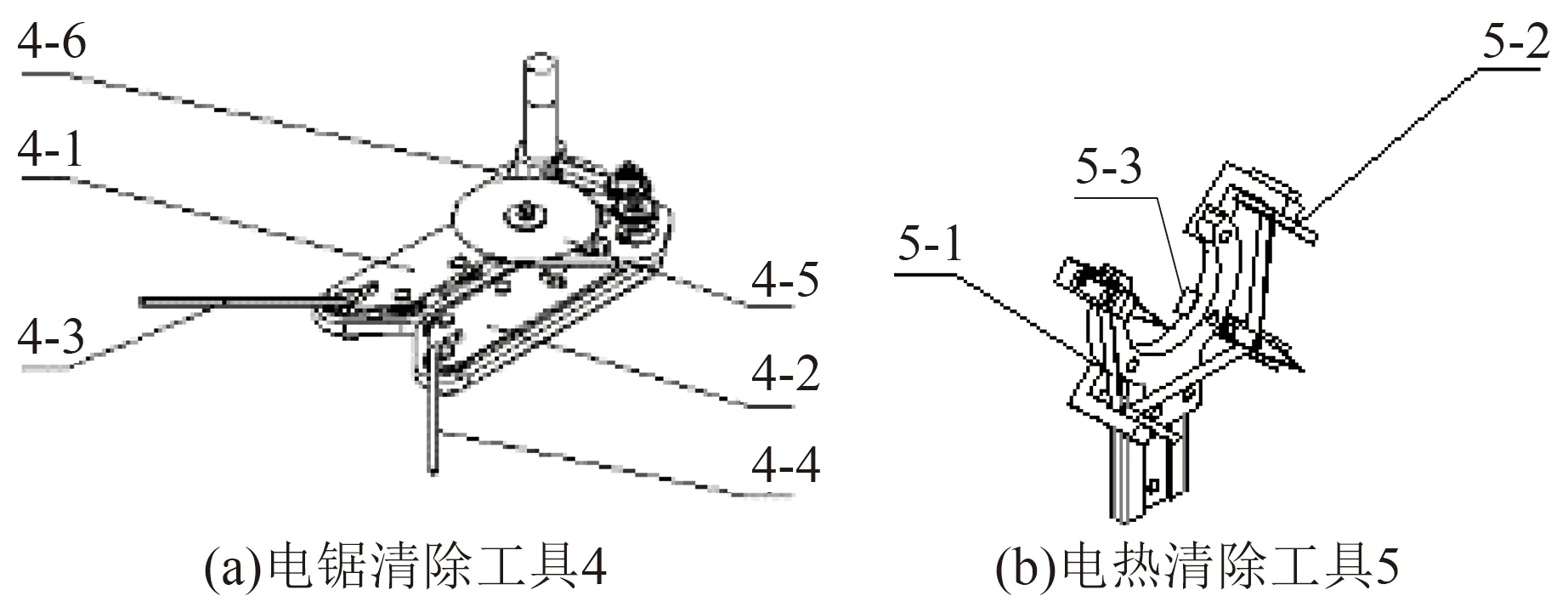
图2 异物清除作业工具Fig.2 Foreign matter removal tools
电锯清除工具4利用同步带轮的相向和反向运动实现对异物的夹紧和导出功能。电锯清除工具4包括左夹持臂4-1、右夹持臂4-2、左导向架4-3、右导向架4-4、驱动电动机4-5和电锯切割装置4-6组成。左导向架4-3和右导向架4-4分别安装在左夹持臂4-1和右夹持臂4-2末端,左右导向架可实现对异物的导向作用;左夹持臂4-1和右夹持臂4-2采用同步带轮传动方式,利用电动机4-5直接驱动左夹持臂4-1的同步带轮进而实现同步带的转动,再通过齿轮啮合的传动实现右夹持臂4-2的同步带轮相向转动;利用电动机驱动电锯切割装置4-6中的电锯转动实现对异物的剪切。
电热清除工具5主要包括电热合金丝5-1、导向块5-2和隔热件5-3,其中铁铬铝电热合金丝5-1安装在4个导向块5-2上,隔热件5-3采用微晶玻璃陶瓷的材料加工。通过控制铁铬铝电热合金丝供电的通断,利用电流通过时产生的热量熔断可燃异物,实现切除异物的功能。
2 机器人运动学建模
D-H法是一种针对开式链机构建立连杆坐标系的建模方法,利用D-H法对输电线路异物清除机器人运动学进行分析,坐标系如图3所示。机器人的工作状态可分为移动、电锯清除和电热清除3种状态。移动作业阶段只需控制行走轮的启停和速度,即可控制机器人的运动。异物清除作业阶段需要控制电锯清除和电热清除作业工具的切换和启停。
坐标系6与所要清除的异物固连,原点设在导线圆截面的中心;坐标系1与轮子固连,原点在轮子的中心,Z轴为行走轮的旋转方向;坐标系2与机器人机架固连,原点设在机器人连接举升机构的正下方;坐标系3与举升机构齿轮固连,原点在齿轮的中心,Z轴方向为齿轮的旋转轴方向;坐标系4与锯片切割工具固连,原点在切割锯片的中心,Z轴为垂直方向;坐标系5与电热切割工具固连,原点在支撑环的中心,Z轴为工具升起的方向。机器人参数见表1,其中,i为连杆序号,ai-1为连杆长度,αi-1为连杆扭角,di为两连杆距离,θi为两连杆夹角。

图3 机器人建模D-H法坐标系Fig.3 D-H coordinate system for robot modeling

表1 机器人参数Tab.1 Robot parameters
机器人行走作业过程中,利用行走轮实现对异物的趋近,利用举升机构实现作业工具的高度调节。
作业工具对于参考坐标系的位置和姿态可以用矩阵T表示,即

(1)
式中:n、o、a为作业工具的姿态矢量,o为正交矢量,n为方向矢量,a为接近矢量;p为行走机构的位置矢量。虽然实现三维空间的任意位姿需要机器人具有6自由度,但异物清除机器人作业工具作业时总是与输电线在1个平面内,作业工具只需单一方向靠近异物即可满足作业要求,在这种情况下2自由度机器人就可以满足要求,利用行走轮实现前进方向的自由度,举升机构实现上下自由度。
根据机器人运动学的D-H描述方法,每个位姿
(2)
于是行走机构目标端的位姿可以表示为
(3)
对于输电线导线,为使行走机构能够夹住目标线路,必须满足以下2个条件:①作业工具能移动到达目标位置;②作业工具的高度应能够完全清除异物。设抓取目标线路的方向矢量为(nx,ny,nz),位置矢量为p=(px,py,pz)T。令n=(nx,ny,nz)T,得
(4)
(5)
当解出关节变量值都在其阈值区间内时,作业工具便可以准确定位异物,从而实现异物清除。
3 运动仿真与实验验证
3.1 作业仿真分析
机器人清除异物时需要依据异物类型进行作业工具切换,异物清除机器人机构通过1个自由度即可快速实现2种作业工具的快速切换。为验证机器人机构作业工具切换的可行性,进行了相关仿真分析,仿真模型如图4所示。

图4 机器人仿真模型Fig.4 Robot simulation model
根据异物和环境特点规划作业末端的运动轨迹,首先机器人通过举升机构实现作业工具的切换和高度调节,利用行走轮驱动机器人前进作业。采用Step函数规划各关节速度,Step函数为
fStep(t,t0,h0,t1,h1)=
(6)
式中:t为自变量,可以是时间或时间的任一函数;t0为自变量的Step函数开始值;t1为自变量的Step函数结束值;h0为Step函数的初始值;h1为Step函数的最终值。
工具切换运动曲线如图5所示。图5(a)为作业工具驱动器、电锯清除工具、电热清除工具末端在3个方向上的位移s1、s2、s3曲线,图5(b)为作业工具驱动器、电锯清除工具、电热清除工具末端速度v在3个坐标分量v1、v2、v3曲线。可以看出,该作业机构的工具切换和高度调节通过图3各关节即可实现。
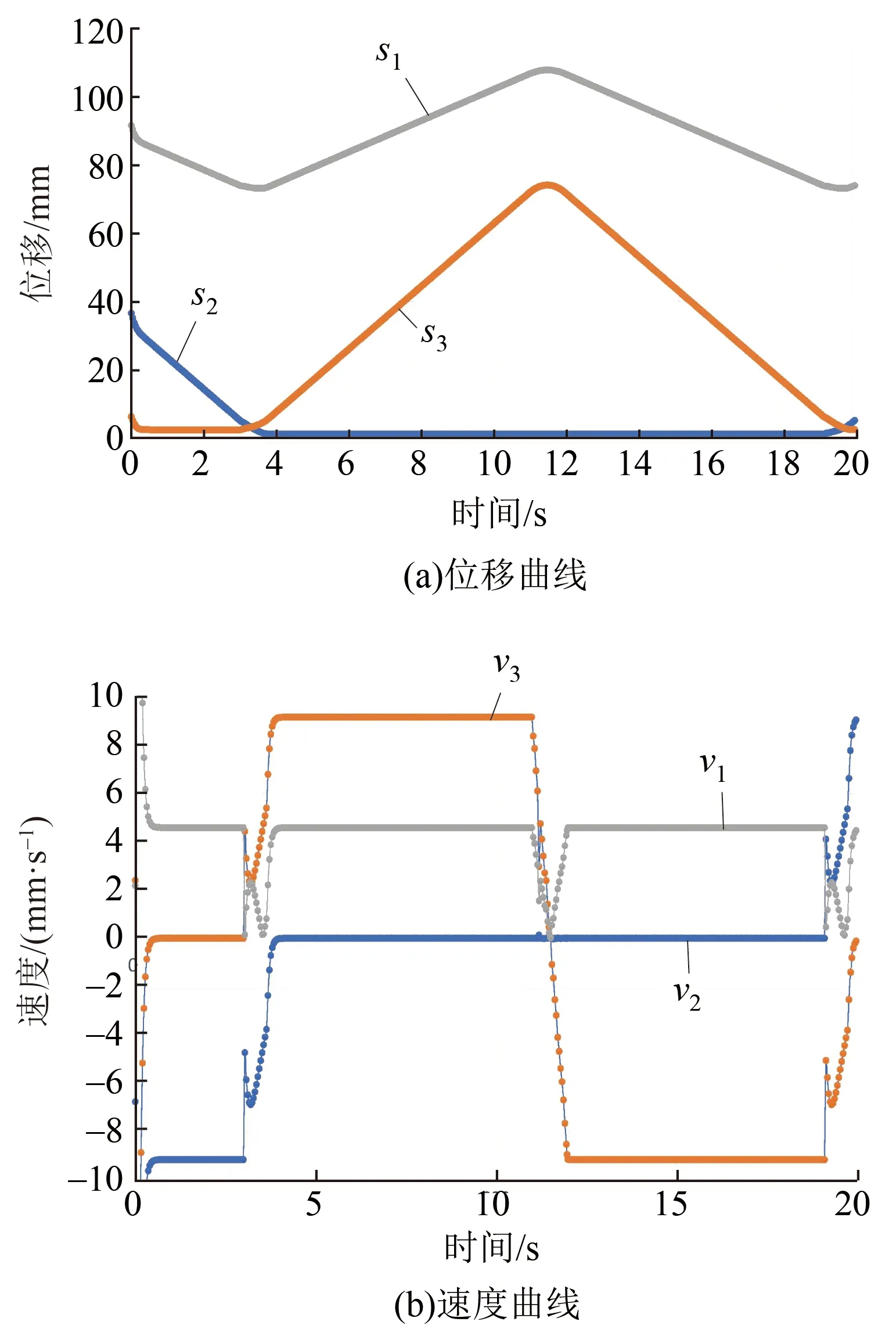
图5 工具切换运动曲线Fig.5 Movement curves of tool switching
由以上仿真分析可以看到,机器人通过单一自由度即可快速平稳地完成作业工具切换和高度调节,在有效降低机器人复杂程度的同时降低了机器人的自重,提高了机器人的负载能力,验证了机器人举升机构设计的可行性,异物清除机器人能够高效完成异物清除作业。
3.2 爬坡仿真分析
输电线路难清除异物一般存在于野外或大档距域,巡线作业工人不便处理,所以要求异物清除机器人必须具备爬行大角度输电线路的能力。为了验证本文所设计机器人的爬坡能力,进行相关仿真分析。
利用规划出的关节曲线驱动异物清除机器人在ADAMS虚拟样机中完成沿线路行走,仿真时间26 s,仿真步数3 000。仿真过程为线路随着时间旋转,每秒旋转1°,机器人通过2个行走轮匀速在倾斜的线路上行走,机器人移动时间对应线路倾斜角度,如果机器人行走轮未发生打滑即机器人行走距离和时间成正比。本文设计的机器人虚拟样机总质量为30 kg,行走轮结构采用梯形结构,接触角β=20°,接触力碰撞参数见表2。
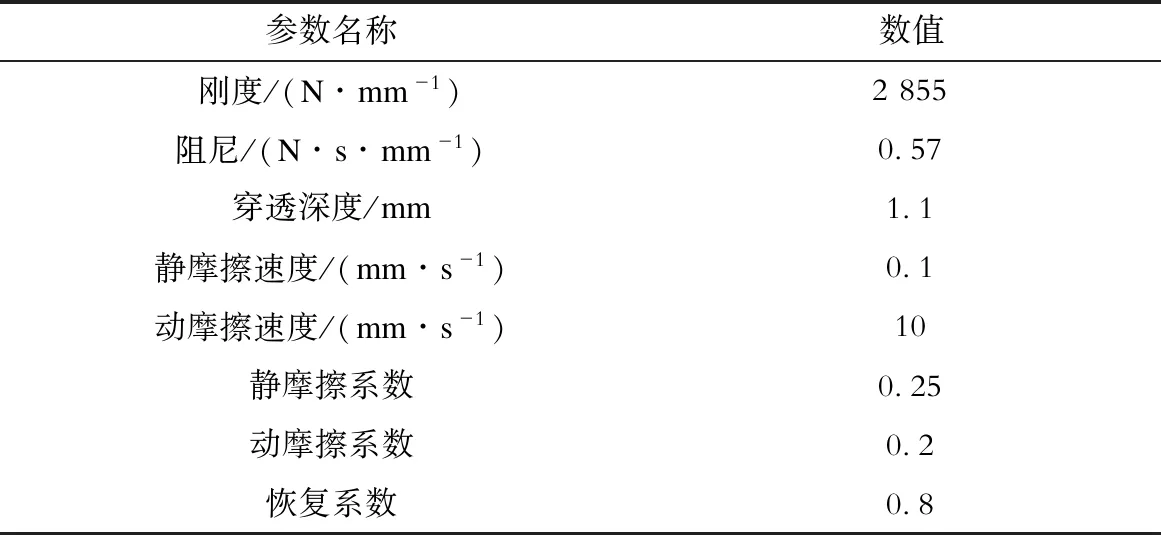
表2 接触力碰撞参数Tab.2 Contact force impact parameters
仿真结果如图6所示,其中仿真时间对应线路的倾斜角度,由图6可知在时间为24.5 s(线路倾斜角度为24.5°)时,行走距离与时间不成正比,说明行走轮发送打滑,即机器人最大爬行角度为24.5°,机器人的爬行能力能够有效满足异物清除的需求。

图6 爬坡能力仿真结果Fig.6 Simulation results of climbing ability
4 实验
在仿真分析的基础上,对机器人模型进行优化设计,研制了输电线路异物清除机器人样机系统,进行清除风筝线和缠绕塑料的相关实验(图7、图8),实验结果表明机器人系统具备了输电线路上清除可燃性或者可切割性异物的功能。
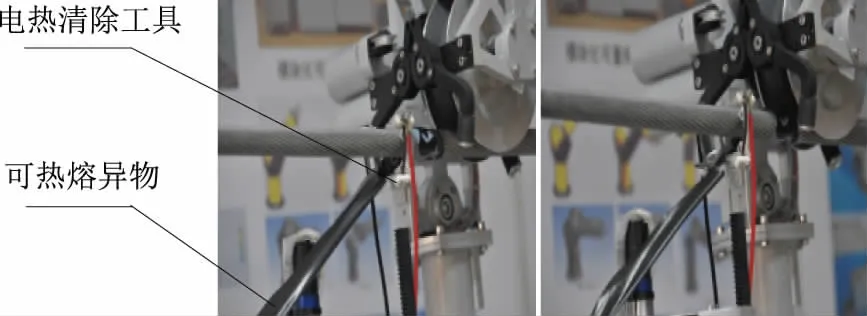
图7 电热清除实验Fig.7 Electrothermal clearing experiment

图8 电锯清除实验Fig.8 Electric saw clearing experiment
5 结束语
针对输电线路上可燃性或可切割性异物的清除问题,对一种输电线路异物清除机器人机构进行了优化设计,利用机器人自身的行走自由度和1个作业自由度(共2个自由度)即可完成行走、作业、工具切换等功能。机器人具备2种作业模式,利用电锯和电热的方式能够有效去除可切割性异物或可燃性异物。