排水泵房智能巡检与诊断机器人的应用研究
2021-02-04任文清高小强梁占泽
任文清,高小强,梁占泽,王 飞
(国家能源神东煤炭集团有限责任公司,陕西 神木 719315)
大柳塔煤矿是当前世界最大的井工煤矿,隶属于国家能源集团神东煤炭公司,是一座现代化生产矿井,核定生产能力为3300万t/a。面对如此巨大的煤炭产能,矿井在不断改革创新,引进行业最先进的采煤设备,目前井下主要生产系统已完全实现了机械化,辅助生产系统实现了自动化,部分设备逐步实现智能化。当前煤矿井下排水泵房基本实现了无人值守,但由于泵房在长期运行过程中设备故障和隐患不能被及时发现,往往造成严重的排水故障或安全责任事故。因此对运行设备的故障、隐患进行及时诊断或控制显得尤为重要[1-3]。
随着科学技术的不断进步,近年来已有越来越多的机器人被应用到设备巡检领域,例如输油场站应用防爆轮式巡检机器人工作效果明显,并且比人工巡检更高效;城市管廊应用的轨道式巡检机器人已完全能够替代人工巡检工作;智能巡检机器人在综采面的应用,解决了煤矿井下工作空间有限、复杂工况下的生产监测问题;煤矿变电站智能巡检机器人的研制,可完全代替人工巡检,这也为煤矿使用新一代巡检机器人的研发奠定了坚实的基础[4-7]。
传统的井下水泵房运行方式采用固定视频监视和人工流动巡检。固定视频监控范围有限,需要在运行设备处布置大量摄像头,布线多、功耗大、维护任务艰巨,而且图像监视、轮巡和存储工作量大,综合效率非常低下;人工流动巡检不能及时发现设备隐患,效率低下、浪费人力,且井下恶劣的工作环境对人身安全存在威胁。因此,迫切需要开展设备自主巡检技术研究,探索通过机器人技术辅助人工巡检或代替人工巡检,在减轻基层员工劳动强度的同时,也降低了人工巡检的安全风险,提升煤矿企业的本质安全管理[8,9]。
本文结合大柳塔煤矿5-2煤五盘区排水泵房设备的实际情况,引进矿用轮式智能巡检机器人代替人工巡检,取得了良好的应用效果。
1 矿井水泵房巡检机器人应用研究
1.1 5-2煤五盘区排水泵房现状描述
大柳塔煤矿5-2煤五盘区排水泵房主要承担着井下5-2煤采掘工作面涌水、井下生产系统冷却水、主辅运巷道淋水和探放水的抽排任务。泵房安设7台水泵,其中3台型号为MDA280-46×4离心泵,单台功率315kW,流量280m3/h,扬程为258m;4台型号为MDA280-43×4离心泵,单台功率为220kW,扬程为172m,全部具备就地、远程和自动控制功能。
泵房运行模式为:3台工作、3台备用、1台检修,正常排水能力500m3/h,最大排能力700m3/h。在日常运行过程中,由于排水系统中电动阀故障率较高,启动离心泵时,往往需要人员在现场观察流量、正负压仪表数据,及各类球阀、闸阀的开停状态,判断离心泵抽水是否正常。其次,还需要人员对泵房电机、缆线和泵体进行日常震动、温度、声音异常等点检,对泵房环境气体进行日常监测和巡查,造成人员投入大、工作效率低下的等问题。
1.2 定义及原理
矿用巡检机器人是一个集机械、电子、计算机、移动通讯和防爆等技术于一体的多学科相互交叉、融合的系统[10]。矿用轮式智能巡检机器人是借助磁轨导航技术,通过在磁轨上布置电子标签,执行机器人行走、调速、转弯、升降和检测等动作。
矿用巡检机器人不仅具备传统检测控制设备的功能,而且能够通过自身的“耳”“眼”“鼻”全方位无死角的对设备进行智能巡检,巡检手段比人工巡检更加专业,比传统的检测手段更加完善,同时能大幅度的减轻工人的劳动强度[11,12]。
1.3 需要解决的问题
为补充水泵房自动化运行过程中存在的不足,在5-2煤五盘区水泵房引进矿用巡检机器人。本文综合巡检机器人通信、供电、行走、控制和诊断等因素,考虑选用的巡检机器人可解决以下几方面问题:
1)水泵房管路各类仪器仪表较多,缆线错综复杂。在通讯网络建设过程中必须全面考虑机器人组网简单,后期维护方便,及使用稳定可靠。
2)机器人供电方式选择,需要考虑设备供电方式可靠,供电电压稳定,后期维护量小,维护成本低等问题。
3)水泵房内泵体、电机、管路和缆线较多,可用空间狭小,需综合考虑巡检机器人行走轨道布置简单。
4)机器人需完全替代人工巡检,需具备识自动别泵房各类仪器仪表数据、电机温度、声音异常识别和环境温度监测等功能。
5)机器人控制必须同时具备自主巡检、远程控制、且可与泵房自动化系统实现联动控制等功能,并根据机器人巡检识别到的数据对设备故障进行预知预判,从而为无人值守泵房的安全运行提供有力保障。
1.4 问题解决方案
综合考虑上述需要解决的问题,选用隔爆兼本质安全型轮式智能巡检机器人(下文简称:巡检机器人)。
1.4.1 组网设计
目前大柳塔煤矿井下已建成4G一网一站环网系统,如图1所示,在五盘区水泵房布置一台4G综合分站,机器人本体与无线基站采用无线通讯传输。为保障巡检机器人数据通信的稳定和可靠性,在水泵房两端头分别布置无线基站,两台基站之间通过光纤连接。无线基站通过网线接入4G综合分站,实现巡检机器人与上位机的通信,确保在远程工作站完成对现场设备的监控、分析、告警和诊断等功能。

图1 无线基站工作示意图
1.4.2 机器人磁轨设计
轮式巡检机器人通过磁轨方式自主行走,五盘区水泵房机器人磁轨布置如图2所示。因水泵房管路侧有一条铺设管道的地沟,为不影响机器人巡检效果,在地沟上铺设20mm厚钢板,然后在钢板上整体铺设亚克力胶板对地板找平。
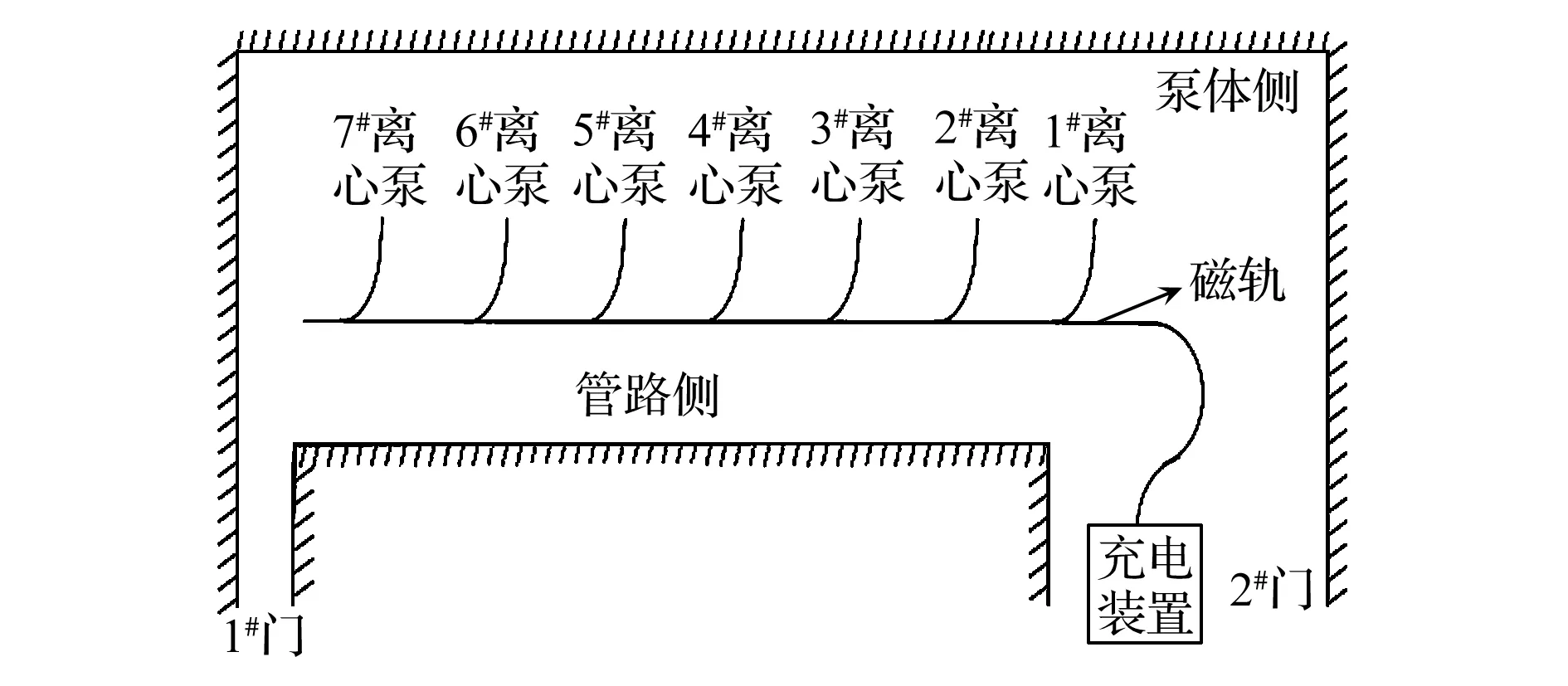
图2 五盘区排水泵房磁轨布置示意图
根据机器人在水泵房的巡检区域提前规划和设计轨道,在设计好的轨道上铺设若干条规格为10mm×10mm×1000mm的磁条,并借助乳胶固定在亚克力胶板上,确定机器人的巡检路线。根据机器人的巡检对象预设电子标签,并采用强力粘贴胶将其牢牢地固定在磁条上方,确定机器人的停留位置,并按预制程序执行调速、转弯、升降和检测等命令。
1.4.3 机器人供电设计
巡检机器人自主充电装置如图3所示,因五盘区排水泵房空间相对狭小,所以巡检机器人充电装置布置在水泵房2#门口角落处,但该区域具有一定坡度,不利于充电设备的布置。为此,在充电设备安设位置采用混凝土施工对地板进行找平。
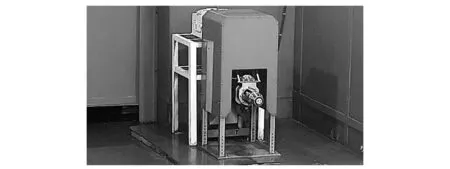
图3 巡检机器人自主充电装置
巡检机器人自主充电装置由充电机构、防爆充电控制箱组成,两设备之间由电缆进行连接,在轨道终端完成机器人充电工作。该机构具有体积小、重量轻、结构紧凑,充电电压输入范围宽,发热量小,充电效率高等优点。自主充电接触部具备电气闭锁功能,在机器人不充电或故障状态下,触点严禁带电,保障了现场运行安全[13]。
1.4.4 机器人本体
轮式巡检机器人本体包扩高增益通讯天线、智能充电接口、轮式运动底盘、防爆双视云台模块 、本安型避障模块、防爆导航模块、防爆语音对讲模块、辅助现场环境检测传感器等部分组成。
高增益通讯天线为机器人提供可靠的网络环境;自身携带的大容量电池,为轮式运动平台的自由移动提供了有力的动力支撑;机器人轮式运动底盘采用四轮驱动,每个驱动配备了大功率电机,机器人具备一定的越障和爬坡能力;防爆双视云台上搭载高清摄像仪与红外热成像仪,可对现场设备进行高效巡视;本安型避障模块传感器具有受可见光干扰小、探测距离远、使用方便等特点,集发射与接收于一体,根据现场实际情况调节检测距离,调节的最大距离为3m。巡检机器人前方和后方各安装一个避障传感器,当遇前后遇障碍物时可及时避障,有效提高了机器人运行过程中的安全性能[14];巡检机器人导航采用稳定的磁导航技术和防爆处理技术,巡检机器人本体前、后方底部搭载导航传感器,具有灵敏度高、功耗低、响应速度快的特点;防爆语音对讲模块配备大口径镀金震膜咪头,采用DSP数字信号处理器技术和ClearSpeech自适应动态降噪处理技术,通过电子噪声动态闭环抑制电路,彻底消除电子噪音,为机器人系统对现场工况设备故障噪音的分辨提供了保证[15]。同时采用大功率扬声器,满足户外声音洪亮、清晰要求,实现机器人本体与远程控制站处之间的双向对讲;辅助现场检测传感器包括温度、湿度和CD4多参数气体检测仪,即包括一氧化碳、甲烷、硫化氢和氧气四种传感器,为机器人能在各种复杂使用环境下运行提供了坚实的保证。
1.4.5 远程工作站布置
在地面区域生产控制指挥中心布置远程工作站,调度员可通过区域煤矿集中自动化控制系统实现与机器人联动控制,也可在远程工作站实现对机器人远程干预和控制,在软件平台上能直观的反映出机器人本体采集的视频信息和自主识别仪器仪表的运行数值、各类阀的开停状态、电机电缆的运行温度和泵体异常声音诊断及各类异常数据的报警信息。同时也可在其他任何计算机安装客户端访问工作站或在智能移动终端安装APP软件,实现机器人远程监控。
2 轮式巡检机器人在水泵房的应用
2.1 现场智能巡检情况
1)按巡检轨迹每隔3h对水泵房设备进行全面巡检一次,一次巡检时间约26min,每日完成巡检7次。
2)视频巡检镜头对泵房仪器仪表、各球阀、电动阀开停状态、管道跑冒滴漏进行检测和自主识别,如图4所示。
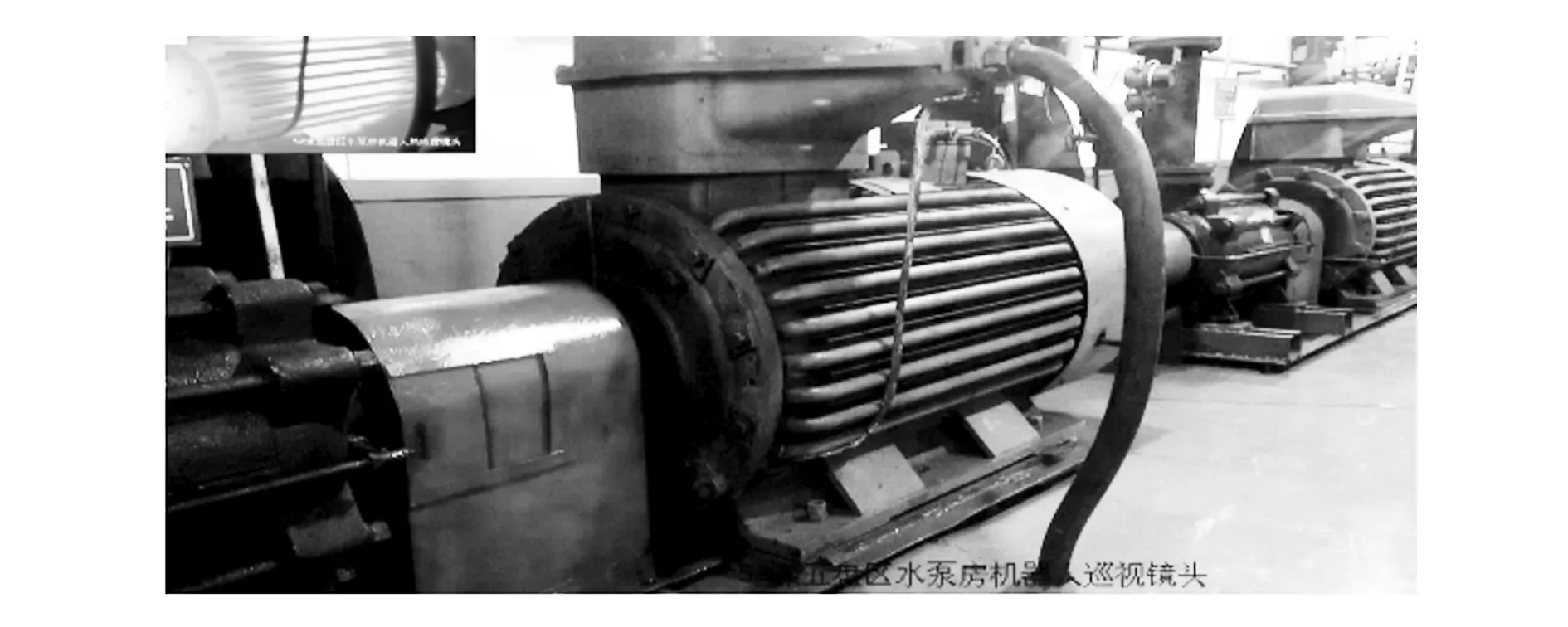
图4 机器人巡检监控画面
3)红外热成像可对泵房泵体、电缆、电机、各类阀温度进行自主识别。
4)语音识别系统对现场离心泵运行异常声音进行诊断判断,并可进行双向对讲。
5)实时监测泵房环境气体(包括甲烷、一氧化碳、氧气和硫化氢)、温度和湿度等。
2.2 巡检数据分析与诊断
以五盘区水泵房轮式巡检机器人应用以来,运行稳定,对仪器仪表数值识别率较高,以运行28d的数据为例,机器人巡检数据识别记录见表1,识别率平均达90.3%,数据分析准确,诊断结果无误,异常报警及时,完全可作为判断泵房运行是否正常的依据。

表1 五盘区水泵房仪器仪表识别记录(11月1日—7日)
2.3 与自动化系统联动控制
井下水泵房自动化控制系统是通过盘区变电所PLC柜接入生产控制环网,智能巡检机器人是通过无线基站进入生产控制环网,将两套系统通讯接口和协议对接后,可在后台实现数据交互。因此,当工作人员在自动化系统远程操作某台离心泵时,机器人可自主前往巡检,同时将巡检的异常事件自动反馈至自动化控制系统,方便工作人员对故障进行分析和判断。
2.4 取得成果
1)巡检机器人对泵房进行高效率、无死角的巡检,代替人工巡视,降低了巡检人员工作强度,提高了巡检效率,为矿井实现无人值守提供了技术支持。
2)巡检机器人支持全自动和遥控巡检模式,地面监控人员可以随时介入接管巡检机器人,使之成为调度人员、运维人员在现场的眼、耳、脑的延伸,提高了对现场的监管力度。
3)上位机软件对巡检数据的存储、分析与诊断,可以及时发现设备隐患,降低设备故障率,有效规避了人工巡检存在的弊端,提高了矿井智能化水平。
2.5 创造的效益
机器人替代人工巡检,每年节约人工成本约80万元,减少设备故障带来的财产损失约300万元。
3 结 语
大柳塔煤矿将矿用轮式智能巡检机器人应用到五盘区排水泵房,完全替代了人工巡检,取得了良好的应用效果,是大柳塔煤矿在智能化矿井建设中的首次尝试,为矿井下一步将巡检机器人应用到其他生产系统积累了宝贵经验。同时,随着科技水平的不断提高,巡检机器人具备的功能更加完善,巡检更高效。因此,在世界一流矿井建设的关键时期,矿用智能巡检机器人必将具有非常可观的应用前景。
