某型飞机驾驶杆操纵空行程故障分析与排除
2021-02-03王蹦蹦尹伟
王蹦蹦 尹伟
摘要:针对某型飞机驾驶杆操纵空行程故障,从系统组成及工作原理分析产生空行程故障的原因,通过对系统操纵性能、铰链安装及主要机件分析排查确定故障点,为该类故障的分析和排除提供参考。
关键词:驾驶杆;操纵;空行程
Keywords:control stick;control;empty stroke
1 故障现象
飞行员通过向前推或向后拉驾驶杆操纵水平尾翼舵面的上下偏转,实现对飞机纵向俯仰方向的操纵。飞行员反映某型飞机向后拉驾驶杆感觉操纵无力,再次向后拉杆才有操纵力,飞机抬头姿态响应迟缓,怀疑平尾操纵系统存在空行程故障。飞机着陆返场后,地勤人员依据经验更换了可能引起此故障的机件:载荷机构和液压助力器,重新调整和检查系统工作性能合格后,再次飞行时故障复现。飞机操纵系统存在空行程故障将导致飞机操纵性能下降,给飞行员造成较大的心理压力。
2 系统组成及工作原理
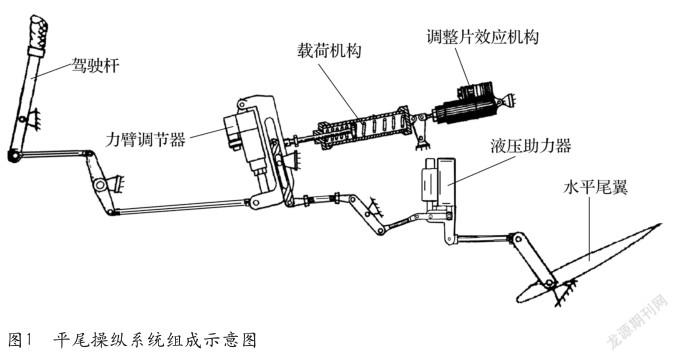
该型飞机采用全动式水平尾翼(简称平尾),平尾操纵系统组成如图1所示,主要机件包括驾驶杆、传动拉杆、摇臂、载荷机构、调整片效应机构和液压助力器等,并设置了能随飞行表速和飞行高度自动改变系统传动系数和操纵力的力臂调节器。
操纵平尾时,飞行员推拉驾驶杆,经拉杆和摇臂组成的传动杆系使力臂调节器转动,再经拉杆和摇臂传动给液压助力器上的输入摇臂机構,带动配油柱塞移动打开液压油路,活塞杆在液压作用下带动输出摇臂,通过传动杆和摇臂驱使水平尾翼偏转。
为了保证飞机有良好的俯仰操纵性,当飞行高度升高或飞行表速较小时,需要增大系统的传动系数和减小操纵杆力梯度;当飞行高度降低或飞行表速增大时,则要求减小传动系数和增大操纵杆力梯度。力臂自动调节装置能随飞机飞行高度、速度的变化,按一定的规定率自动改变力臂调节器力臂的大小,以改变系统的传动系数和杆力梯度,保证飞机在任何高度和表速下飞行都有较好的俯仰操纵性。
3 原因分析
为全面准确地了解故障现象和飞行员操作情况,先后咨询了该机的两名飞行人员。一名飞行员反映,第一次故障发生在飞机着陆时,飞行员操纵驾驶杆由向前推杆改为向后拉杆的过程中明显感觉有空行程,引起操纵无力,增大拉杆行程后才有操纵力。另一飞行员反映,第二次故障发生在更换机件后的再次飞行期间,当飞机飞行高度分别在3000~4000m、1000~2000m和着陆中,飞行速度约360km/h时,拉驾驶杆感觉操纵杆力轻,有空行程,飞行速度达到950km/h时操纵杆力正常。
根据以上描述,结合平尾操纵系统的组成及工作原理,初步判断应是系统存在活动间隙或机件故障导致驾驶杆操纵空行程故障,使得驾驶杆操纵动作转换变得迟缓无操纵力。从可能引起操纵空行程故障的以下几方面因素进行分析排查:
1)机械传动杆系存在零件松动或磨损产生的活动间隙;
2)平尾安装存在活动间隙;
3)载荷机构初始杆力小;
4)力臂调节器故障;
5)调整片效应机构故障;
6)平尾助力器故障。
4 故障的排查与定位
4.1 系统操纵性能检查
给飞机通电供压,检查平尾操纵性能和技术参数,查看故障是否复现。检查在操纵平尾工作过程中特别是推拉驾驶杆动作转换时系统是否存在明显的活动间隙或松动,是否出现操纵迟缓无力,是否有撞击声、舵面振动或抖动等现象。经检查,调整片效应机构工作正常,力臂调节器大小力臂转换工作正常,性能参数符合要求。平尾操作过程中未发现系统有明显抖动、工作不平稳等异常情况。
飞行员反映当飞行速度低于360km/ h时和着陆阶段驾驶杆动作转换时操纵杆力轻和空行程感觉较为明显,当飞行速度增大到超音速时操纵正常。根据力臂调节装置工作原理,在自动状态下,力臂调节器自动调节性能异常也可能影响到操纵性能。由特设人员使用两个全、静压试验设备,按空速表对应的飞行速度和飞行高度进行力臂调节器大小力臂自动转换性能检查试验,力臂调节器自动调节系统工作性能良好;查看力臂自动调节系统大小力臂转换相关飞参数据信息,未发现异常。
4.2 查看飞参记录信息
通过飞参记录信息判读驾驶杆操纵动作与平尾舵面偏转轨迹的同步性以及驾驶杆动作时对应平尾舵面偏转响应的及时性。如果系统存在空行程,飞参记录信息中会反映驾驶杆操纵与平尾偏转不同步或迟缓、波动数据信息。重点查看了飞行速度360km/h附近和着陆阶段的飞参记录数据信息,并与其他正常飞机的飞参数据信息进行对比,未发现明显的不同步和舵面响应迟缓、异常波动等情况。
4.3 系统安装及机件检查
通过上述平尾操纵性能检查,系统操纵正常且故障未复现,飞参信息判读未发现异常情况。要找到故障点还需进一步检查系统各铰链点安装情况,查看是否存在不明显的松动或磨损以及主要机件是否存在异常。
1)在系统连接完好的状态下,检查系统各铰链点安装情况。用手感检查各拉杆、摇臂、载荷机构、平尾助力器等机件的铰链和安装点,未发现明显零件松动和活动间隙,扳动平尾翼尖检查平尾安装,无活动间隙。从28框处断开操纵拉杆,分别检查驾驶杆到28框的刚性操纵杆系以及28框后主要机件操纵件的安装情况,未发现明显活动间隙。
2)从机上拆下载荷机构和调整片效应机构分别检查。由于曾发生过因载荷机构初始力小引起的驾驶杆操纵杆力轻故障,将载荷机构拆下检查载荷力和初始力,力值性能符合要求。检查调整片效应机构,用手晃动其活动杆,感觉有明显轴向活动间隙,与其他飞机调整片效应机构进行对比,轴向活动间隙偏大。将调整片效应机构在试验台校验,发现调整片效应机构轴向活动间隙接近上限值。
3)平尾液压助力器检查。给系统通电供压,推拉驾驶杆操纵平尾过程中检查平尾助力器输入摇臂配油工作正常,且前期已进行更换,因此排除液压助力器故障可能。
4)力臂调节器性能检查。拆开力臂调节器与操纵拉杆的连接,检查安装情况。用力推拉力臂调节器上耳环接头,发现耳环接头与力臂调节器上的固定点有轻微的径向活动间隙。由于力臂调节器与耳环接头的安装是不允许有径向活动间隙的,因此怀疑该活动间隙可能是造成驾驶杆操纵空行程故障的原因。检查对比其他飞机力臂调节器耳环接头,无径向活動间隙。为验证判断,将力臂调节器及拆开机件恢复安装,给飞机通电供压,在机上进行操纵验证。用手来回扳动力臂调节器壳体操纵平尾,能够感到在力臂调节器壳体上有明显活动间隙。推拉驾驶杆操纵平尾,驾驶杆上感受的操纵活动间隙不明显。随后更换了一件耳环接头无活动间隙的力臂调节器,按以上方法进行操作检查,力臂调节器操纵过程中已无活动间隙。
5 故障排除
基于以上故障排查和分析判断可以确定,力臂调节器上耳环接头存在径向活动间隙,以及调校机构活动杆轴向活动间隙偏大,是造成驾驶杆操纵空行程故障的主要原因。更换力臂调节器并调校电动机构后重新调试系统,性能合格,经飞行员飞行验证,驾驶杆操纵空行程故障消失。
6 结论
飞机出现操纵空行程故障通常与系统零件或机件磨损以及松动产生活动间隙有关,且在飞行全过程都会出现操纵异常,通过地面操纵检查故障能够复现。该飞机在地面系统操纵检查中故障未复现,分析应是臂调节器上耳环接头径向活动间隙较小,故障较为隐蔽所致。在飞机低速飞行和着陆阶段,平尾舵面承受气动载荷大,对应驾驶杆操纵动作转换所需要的操纵力较大;而在高速飞行阶段和地面操纵检查时,平尾舵面气动载荷较小,动作转换所需的操纵力较小,故操纵空行程故障难以被发现。飞参记录系统未反馈出异常操纵信息的原因是飞参传感器的精度和灵敏度不够,不足以记录较小操纵空行程故障信息。
该架飞机驾驶杆操纵空行程故障的分析和排除,对今后分析处理飞机操纵系统空行程故障,特别是地面检查难以复现的空行程故障具有借鉴作用。
作者简介
王蹦蹦,高级工程师,主要从事飞机操纵修理技术研究工作。
尹伟,高级工程师,主要从事飞机电气修理技术研究工作。
