某型光电吊舱自检红外热像仪异常故障分析
2021-02-03伏克峰
摘要:针对某型光电吊舱自检红外异常故障,通过对系统内部控制信号流程进行深入分析,提出问题的分析思路和处理步骤,最终定位、排除了故障。该故障分析与判断的思路与方法对处理此类问题具备一定的借鉴意义。
关键词:光电吊舱;红外热像仪;自检;异常
Keywords:photoelectric pod;infrared thermal imager;self-inspection;abnormal
0 引言
某型无人机载光电吊舱,在完成功能调试进行缺陷剔除阶段振动试验的过程中,对吊舱功能检查时发现,红外热像仪变倍、调焦等功能正常,红外视频图像上视场值不随视场变倍而变化,持续显示为固定值,吊舱上位机程序控制界面上红外焦距反馈值为0,红外视频图像下吊舱跟踪功能异常,无法正常跟踪目标,吊舱其余功能正常。停止振动,静态环境下重新检查,故障可以复现,对吊舱进行系统自检,系统提示红外热像仪自检“异常”。
1 故障分析
该型光电吊舱主要由稳定平台、可见光电视、红外热像仪、激光测照器、伺服控制器、图像处理器、二次电源等部分组成。
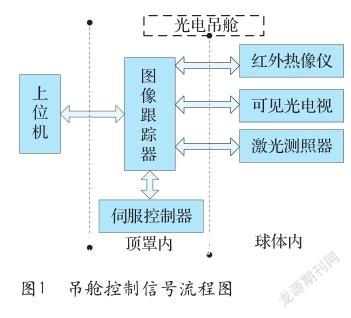
该型光电吊舱系统控制信号流程如图1所示。上位机利用控制程序通过异步RS422总线对吊舱进行功能控制,上位机发出的控制指令首先由吊舱内图像跟踪器进行接收和解读,并根据指令内容转发给可见光电视、红外热像仪、激光测照器等传感器或伺服控制器,各传感器和伺服控制器接收并执行上位机的指令,同时各传感器和伺服控制单元将执行情况通过异步RS422总线方式反馈给图像跟踪器,图像跟踪器对信息进行接收和处理,然后向上位机反馈。
在信号流程中,图像跟踪器处于枢纽位置,其主要作用包括:
1)实时采集来自可见光摄像机或红外热像仪输出的视频信号,计算出图像中目标的位置信息,并将目标偏离视场中心的误差信号输出给伺服控制组件,以驱动稳定转塔转动,实现对目标的稳定跟踪;
2)将输入的数字视频图像进行字符叠加及格式变换,输出模拟PAL视频和数字视频;
3)图像跟踪器作为通信枢纽,与上位机、伺服控制器、可见光电视、红外热像仪、激光测照器进行通信,实现光电吊舱的操作控制和参数传递;
4)图像跟踪器接收来自伺服控制器、各传感器的工作状态等信息,以字符、图形等形式叠加到视频图像上,然后输出给显示器。
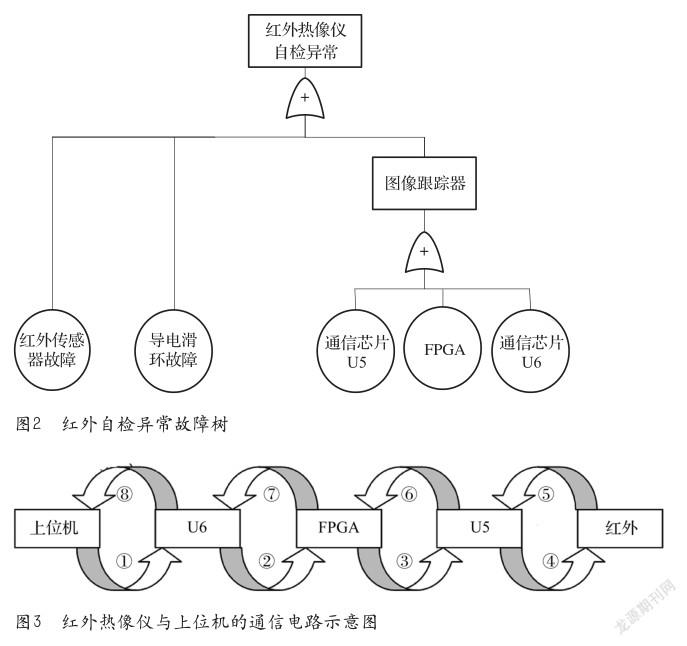
根据系统信号流程,结合故障现象进行分析。首先,上位机可以控制红外热像仪进行变倍、调焦等功能操作,即红外热像仪可正常接收执行上位机指令,说明上位机→图像跟踪器→红外热像仪之间指令发送通道正常;但上位机程序控制界面上红外热像仪焦距返回值异常,且吊舱进行系统自检时提示红外热像仪异常,说明红外热像仪自身故障或红外热像仪→图像跟踪器→上位机的信号反馈通道出现了异常。根据以上分析,以自检红外热像仪“异常”为顶事件建立故障树,对各种可能故障分支逐项进行分析,如图2所示。
1.1 红外热像仪故障
打开吊舱后球壳,拆下红外热像仪上的供电及通信接插件,用工装电缆连接红外热像仪,单独对红外热像仪进行检测,结果红外图像清晰,变倍、调焦等功能正常,视场值、焦距反馈值随视场变换而变化,均正常,排除红外热像仪故障的可能。
1.2 导电滑环故障
由于图像跟踪器安装在吊舱上部顶罩内,红外热像仪安装在吊舱下部的球体内,顶罩与球体之间可进行360°的连续旋转,由导电滑环实现顶罩与球体之间的供电、通信以及视频传输。
根据吊舱布线工艺文件,分别查出红外热像仪与图像跟踪器之间RS422通信信号在各自接插件上的对应管脚,利用三用表欧姆档分别测量用于RS422信号传输的两根导电滑环线的接触电阻值。测试的同时,使顶罩与球体之间缓慢进行360°相对运动,这样可以检测出局部接触不良的情况。经检测,360°区间内阻值无跳变,排除导电滑环故障的可能。
1.3 图像跟踪器故障
更换为图像跟踪器完好备件,进行代换测试,更换后吊舱自检红外热像仪“正常”,红外热像仪变倍、调焦等功能正常,视场值、焦距反馈值随视场变换而变化,均正常,红外图像下跟踪功能正常。重新安装原图像跟踪器,故障可以复现,由此确认图像跟踪器故障。
为进一步确定图像跟踪器故障的部位,按故障树逐项检查。
1)通信芯片U5(MAX3490)故障
MAX3490通信芯片用于实现将单端信号与RS422电平差分信号的相互转换,为全双工通信芯片。
U5负责FPGA与红外热像仪之间通信,为判断U5是否正常工作,首先对U5通信芯片的RS422差分信号接收管脚进行检测,确认反馈红外热像仪信息的RS422信号是否到达U5。用示波器分别检测U5的7脚、8脚,7脚上可观测到幅值为5V的通信信号波形,8脚上仅观测到高电平,未观测到通信信号,但在8脚的焊盘上可观测到幅值为5V的红外热像仪反馈信号波形。用示波器检测U5通信芯片单端信号输出端2脚,无通信信号波形。用示波器表笔稍微用力按压U5芯片8脚,可检测到通信波形,松开后波形消失。
利用电子显微镜检查通信芯片U5的各管脚焊接情况,发现U5的8脚焊锡量比其他管脚明显偏少,可判定U5的8脚虚焊。
2)FPGA故障
首先,在X光机下检查FPGA的焊接情况,发现锡球均匀,未见空洞,焊接良好,无虚焊现象。之后将U5通信芯片8脚重新焊接正常后,用示波器檢测U5通信芯片单端信号端2脚,信号正常,说明红外热像仪反馈信号已能正常输入FPGA。然后,检测FPGA输出管脚通信信号波形是否正常,即通信芯片U6的3脚输入单端信号波形正常。由此判定,FPGA可正常接收U5反馈的红外热像仪信息,并经处理后发送给U5通信芯片,FPGA工作正常,排除FPGA故障的可能性。
3)通信芯片U6(MAX3490)故障
U6可实现上位机与图像跟踪器之间的通信,根据各传感器及伺服控制器可正常执行上位机指令,以及除红外热像仪反馈信息外各传感器及伺服控制状态反馈信息均可正常反馈至上位机,判定通信芯片U6正常,排除通信芯片U6故障的可能性。
2 机理分析
红外热像仪与上位机之间的通信电路示意图如图3所示。
当上位机发送红外热像仪变倍、调焦等功能指令时,指令先以异步RS422方式发送至图像跟踪器上的接口通信芯片U6(MAX3490),U6接收到上位机发送的RS422差分信号后,将其转换为单端信号传输给FPGA,FPGA经过内部的处理与判断,将上位机指令传输给通信芯片U5(MAX3490),通过U5将指令发送给红外热像仪,红外热像仪根据指令执行相应动作,从而实现红外热像仪的变倍、调焦等功能。红外热像仪实时将焦距值等信息反馈给U5,U5传输给FPGA,FPGA经过运算后将视场值叠加到红外图像上并实时显示,FPGA同时将红外焦距值经U6反馈给上位机,通过控制界面进行显示。如果上述任何一个环节出现故障,都可能导致红外热像仪执行或反馈值异常。由于图像跟踪器上通信芯片U5的8脚虚焊,造成红外热像仪的反馈回路故障,FPGA无法接收到红外热像仪的反馈信息,造成FPFA反馈给上位机和伺服控制器的红外热像仪焦距值为0,故控制界面上的红外焦距值为0;红外图像上叠加的视场值一直显示为默认值。发送跟踪指令时,因伺服控制单元需要实时调用红外热像仪的焦距值,此焦距值始终为0,造成跟踪算法计算值异常,从而造成无法正常跟踪目标,跟踪功能异常。
3 故障排除
对补充焊接后的U5芯片补绝缘漆,将图像跟踪器恢复装配,吊舱内部接插件连接可靠、球壳安装齐全后,对其进行功能、振动等环境试验验证,红外热像仪自检正常,其余功能亦正常,故障排除。
4 总结
本文通过对某型光电吊舱自检红外热像仪异常故障的分析与排查过程,对吊舱基本控制原理与内部控制信号流程进行了详细的解析,可为同类问题的处理提供参考。
作者简介
伏克峰,工程师,主要从事光电吊舱生产工艺等方面的研究工作。
