基于AMESim和反步控制器的阀控电液伺服系统滑模控制分析
2021-02-03徐洪涛李延民
徐洪涛,李延民
(1.河南建筑职业技术学院 设备工程系,河南 郑州 450064;2.郑州大学 机械工程学院,河南 郑州 450064)
引言
电液伺服系统是一种具备高功重比的结构,可以满足有限空间内快速输出力与力矩的要求,目前已在挖掘机、工业机器人、掘进机等行业获得了大量应用[1-4]。根据实际应用过程可知,电液伺服系统会受到外载荷的作用,从而降低了系统控制精度[5-9]。电液伺服系统滑模控制方面的研究多是采用反步法,WANG等[7]采用负载模拟器力矩跟踪方式,引入反步法补偿系统的非匹配摩擦力和其它作用力,显著降低了系统受到非匹配干扰力的影响程度;石胜利等[10]构建了一种建立在干扰观测器基础上的反步跟踪控制器,以此达到快速补偿外界扰动的效果,同时也避免了采用传统反步控制方式面临的计算膨胀情况;李浩等[11]采用反步法抑制系统遇到的非匹配干扰问题,到达反步法最后一步时建立快速终端滑模,避免系统受到匹配干扰力因素的作用,采用此方法可以对匹配和非匹配干扰都发挥良好鲁棒性。
随着智能控制的进一步发展,先进的控制技术应用于滑模控制中,多是为了提高抗干扰能力。YANG等[12]开发了一种连续终端滑模控制器,可以通过有限时间干扰观测器对非匹配干扰情况进行预估,能够在有限时间中完成估计误差的收敛过程,消除了非匹配干扰产生的影响。WANG等[13]通过状态观测器跟踪含有未知外部常值干扰情况下的系统运行参数。郑剑飞等[14]设计得到了一种可以采用高阶终端滑模进行控制的方法,使系统内的匹配和非匹配干扰都获得明显抑制,同时实现更快速率的收敛并达到更高的跟踪精度。蒲明等[15]主要对高阶非线性系统进行了研究,同时选择高阶滑模微分器作为间接干扰观测器,实现了对系统非匹配复合干扰的控制,之后构建了递阶Terminal滑模控制系统,大幅降低了系统的跟踪误差。YIN等[16]选择自适应滑模的控制模式来达到调控阀控系统和泵控系统的功能,参数不确定性通过反步自适应方式进行处理,同时采用滑模控制的模式降低反步自适应误差并获得更强的抗外界干扰能力。
利用反步法对系统非匹配干扰进行补偿,不过采用该方法需要为系统构建精确数学模型;采用滑模控制方式时不需要精度很高的系统数学模型,能够充分消除系统受到匹配干扰因素的影响,不过该方法无法实现对非匹配干扰过程的快速处理。考虑到采用反步法需要为系统构建精确数学模型,并且采用滑模控制方式无法有效处理非匹配干扰问题,本研究引入了光滑连续一阶可导滑模控制技术,消除了滑模控制和反步控制过程的冲突,实现算法的联合仿真过程。
1 系统描述
1.1 阀控电液伺服系统组成
从图1中可以看到组成阀控电液伺服系统的各个部分。阀控电液伺服系统是利用调节伺服阀阀芯位移的方式来达到控制液压缸活塞的目的。

1.液压泵与电机 2.溢流阀 3.伺服阀 4.压力传感器 5.位置与速度传感器 6.对称液压缸 7.负载图1 阀控电液伺服系统示意图
1.2 阀控电液伺服系统数学模型
称液压缸动态通过下述表达式进行描述:
(1)
式中,m——负载质量
xp——液压缸活塞发生的位移
pL——负载压力,pL=p1-p2,p1,p2分别为液压缸左、右腔压力
ff——摩擦力
A——液压缸活塞有效面积
f——由外负载力以及未建模非匹配干扰力共同组成的合力
根据下述假设条件推导出流量连续性方程:
(1) 伺服阀采用对称匹配型的零开口阀;
(2) 忽略滑阀和液压缸发生泄漏情况;
(3) 保持恒定的供油压力;
(4) 运行阶段的系统总压缩容积恒定。
(2)
式中,qL——负载流量
Ct——系统内泄漏系数
βe——油液弹性模量
Vt——总压缩容积
利用下式表示负载流量和阀芯位移的关系:
(3)
式中,ω——伺服阀面积梯度
Cd——伺服阀流量系数
ps——供油压力
xv——阀芯位移
ρ——油液密度
由于伺服阀具有比系统更高的动态特性参数,因此不需要分析伺服阀的动态变化,阀芯位移:
xv=kxvu
(4)
式中,kxv——伺服阀增益
u——控制输出
采用sgn(x)定义非连续符号函数:

(5)

(6)
根据式(1)~式(5)得到系统动态方程:

(7)

F表示未知数学模型非匹配干扰,该参数会影响到系统对实际位置跟踪的精度。本研究先设置一个位置轨迹xd作为参考,同时利用滑模反步控制律获得控制输出u,避免F对系统产生的影响,从而确保系统输出y=x1能够实现对参考轨迹xd的高精度跟踪效果。
2 仿真研究
采用AMESim与Simulink组成联合仿真测试系统,图2显示了联合仿真模型的具体结构。利用AMESim构建阀控电液伺服系统模型,利用Simulink进行仿真计算。在仿真模型中加入摩擦力、内泄漏、外负载力等多种因素,并分析这些因素对系统产生的影响,外负载力与摩擦力都属于未知非匹配干扰项。
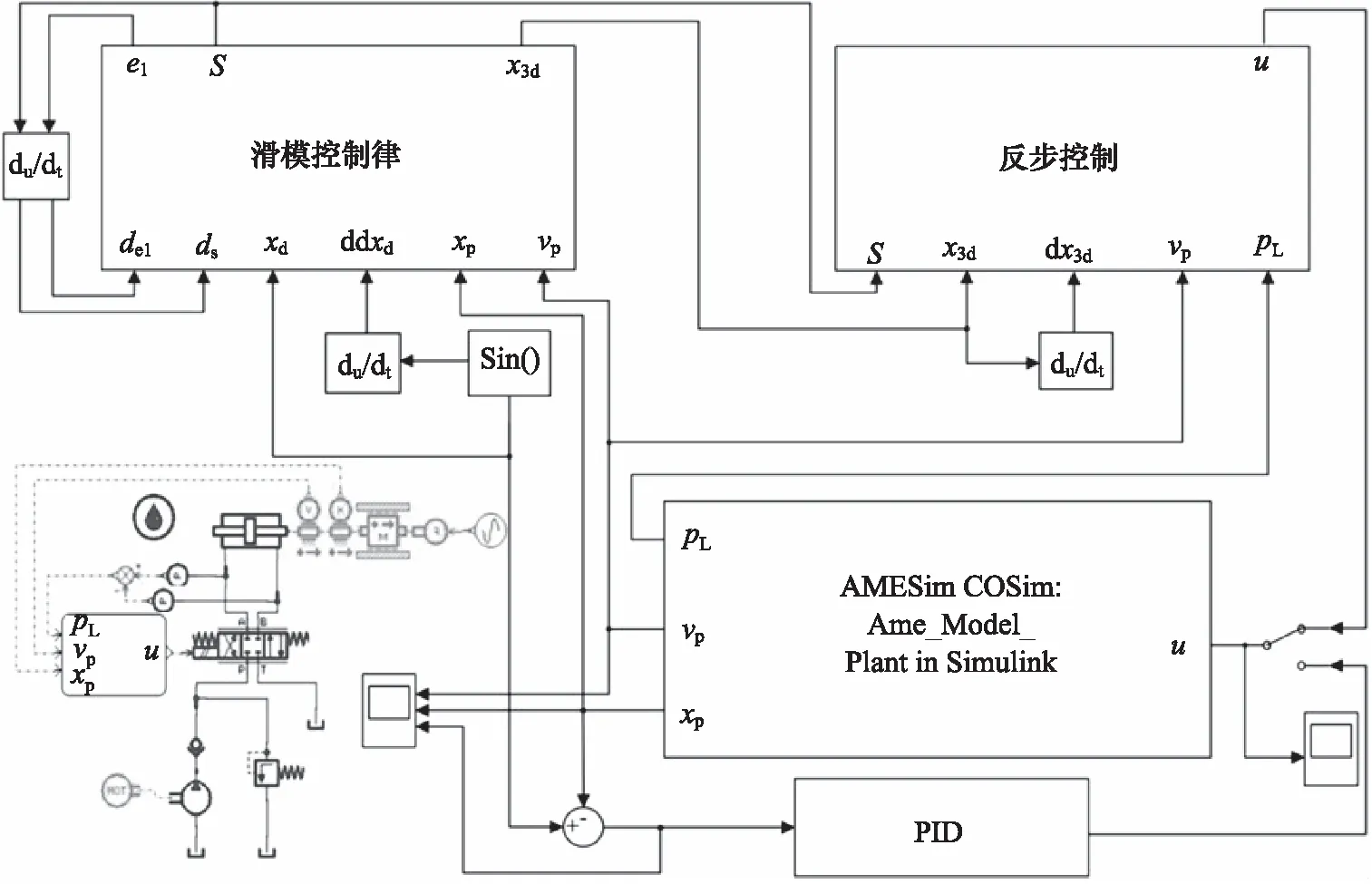
图2 联合仿真模型
表1给出了仿真模型包含的各项参数。设定0.001 s作为仿真采样过程的间隔。xd=0.05sin(2πt)表示参考位置信号。从0开始添加外部干扰力信号,对算法进行设计时将系统摩擦力和干扰力作为有界未知干扰力,外部干扰力信号表示成x1=2000sin(2πt)。通过设置干扰力对控制器抑制未知非匹配干扰过程进行验证。

表1 仿真模型参数
由于PID控制器的结构较简单,同时具备优异的鲁棒性与很强的适应能力,在工业生产领域获得了广泛使用;非匹配干扰通过反步控制器进行处理。采用各控制器达到良好状态的参数作为最终的控制器参数,PID控制器的参数为KP=3000,KI=1500,KD=0;反步控制器参数为k1=200,k2=600,k3=300;滑模反步控制器参数为ξ=0.3,λ=300,k=350,σ=800。

1.参考信号 2.滑模反步 3.反步 4.PID图3 不同控制器跟踪结果对比图
分别对3个控制器进行测试得到控制结果,如图3~图5所示。图3与图4可以看出,综合考虑外负载干扰力、摩擦力各项未知非匹配干扰因素时,在所有控制阶段中,滑模反步控制器都实现了有效抑制未知非匹配干扰的程度,其次为反步控制器,控制效果最差的是PID控制器。根据图5可知,达到稳定的滑模反步控制状态后不会发生抖动情况,引起该现象原因是选择本研究设计的可以实现光滑连续控制状态的滑模控制律能够对输出抖动过程发挥显著抑制作用。

1.PID 2.反步 3.滑模反步图4 不同控制器跟踪误差对比图

1.PID 2.反步 3.滑模反步图5 不同控制器控制输出对比图
为保证满足对比环境公平性,设定下述3个参数:
式中,e(i) ——进行第i次采样时产生的跟踪误差
N——已被记录的跟踪误差数量
u(i)——进行第i次采样对应的控制输出值
IAPE——稳态跟踪误差最大绝对值,随着IAPE的提高,控制效果不断变差
IMSE——处于稳态跟踪阶段的误差均方,随着IMSE的增大,控制效果随之变差
IMSC——控制输出均方数据,表示控制器输出信号
表2是对各定义控制器指标进行计算的结果。分析可以发现,滑模反步控制器相对于反步控制器和PID控制器具备更小的IAPE和IMSE,其中,IMSC达到了最小,由此可以推断处于较低的控制器输出强度下,采用滑模反步控制器可以获得比PID以及反步控制器更优控制效果。系统受到输入、输出的影响,PID控制器达到最大的IAPE和IMSE,获得了最差控制效果;反步控制器引入了虚拟控制器,确保系统状态满足期望值,能够获得较优控制效果,不过在未构建精确数学模型时无法获得良好的控制效果;由于滑模反步控制器同时具备反步控制和滑模控制的各自优势,不需要构建未知系统精确数学模型也可以获得良好控制效果。

表2 控制器评价指标
3 结论
(1) 在分析阀控电液伺服系统组成后,建立了阀控电液伺服系统数学模型。先设置一个位置轨迹作为参考,利用滑模反步控制律获得控制输出,确保系统输出能够实现对参考轨迹的高精度跟踪效果;
(2) 综合考虑外负载干扰力、摩擦力各项未知非匹配干扰因素时,在所有控制阶段中,滑模反步控制器都实现了有效抑制未知非匹配干扰程度,达到稳定的滑模反步控制状态后不会发生抖动情况;
(3)滑模反步控制器相对于反步控制器和PID控制器具备更小的IAPE和IMSE,可见采用滑模反步控制器可以获得比PID以及反步控制器更优控制效果。由于滑模反步控制器同时具备反步控制和滑模控制的各自优势,不需要构建未知系统精确数学模型也可以获得良好控制效果。
