基于改进Elman神经网络的故障诊断模型研究
2021-02-03章雅楠孙建平刘新月
章雅楠,孙建平,刘新月
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引 言
在突飞猛进的现代自动化工业中,为保证现场运行的安全,对于机械设施的故障诊断变得尤为重要。当前,实际现场会将运行过程中的重要参数进行监控记录,但面对产生的大量运行数据,如何从中及时发现故障原因成为了热点问题[1,2]。相比传统的故障诊断方法,基于数据驱动为前提的方法可无需事先知道模型,在自身的学习机制下可自动形成所要求的决策模型[3]。在应用数据驱动的过程中,研究对象常为多特征输入,易出现诊断时间过长的现象。考虑于此,本文的优化目标重点在于保证决策模型精度的要求下,尽可能的降低复杂性,加快故障诊断的速度,进而提高决策模型的性能。
滚动轴承作为现场最为普遍的机械零件之一,同时也是高频易损零件。看似普通的滚动轴承如若出现故障,小则造成设备异常,大则出现安全隐患。目前,对滚动轴承故障的研究常通过分析传感器上大量振动信号并提取故障特征的方法。当下,了解到在文献[4]中提出利用经验模态分解的方法进行故障诊断可取得较好成效。在文献[5]中提出了结合峭度和Morlet小波的方法对不同共振频带的轴承做到增强特征的改进,使得在故障诊断性能上有一定的提升。文献[6]设计了小波包变换和GA-Elman神经网络的方法在故障诊断率方面具有一定的优化。但仅利用经验模态分解或小波包变换等信号分解的方法存在一定的弊端,分解过程无自学习,如遇到外界环境突变或相似类型故障同时发生时,分解故障信息的效果会减半。由于实际现场的高耦合,传感器信号对现场环境的依赖造成故障诊断精度受到影响。相比之下,采用神经网络的方法对诊断精度可得到改善。例如,文献中提及的小波神经网络或Elman神经网络等具有很好的自学习能力及强大的计算能力,可适应于各种工况中。但此方法仍存在缺陷,在网络输入时需将特征信号转化为数字进行保存,使得分析过程转变为计算的过程,易造成信号的丢失,对模型及诊断造成一定的干扰。
本文提出的是一种改进Elman神经网络的故障诊断模型,对滚动轴承采取希尔伯特-黄变换作特征筛选,在经验模态分解后对每个IMF项进行Hilbert变换,可高效提取出对故障信号较为敏感的包络谱作为输入变量,并通过在网络输入层设置时延来改进Elman神经网络,建立故障诊断模型。在对凯斯西储大学轴承数据(CWRU)进行实验中,发现此方法具有很好的诊断效果。本文所提故障诊断模型一方面,将信号分解与神经网络相结合,使的信号分解作为故障信号的预分析,一定程度上可降低模型复杂性,加快诊断的速度。另一方面,对Elman神经网络进行了改进,通过在网络中增加时延环节来降低信号丢失的发生率,可达到提升诊断精度的效果。
1 希尔伯特-黄变换(HHT)
1.1 基本原理
希尔伯特-黄变换方法由Huang[7]等人提出,多应用在非平稳随机信号的研究中。这种方法可分为经验模态分解(EMD)与希尔伯特谱变换(Hilbert变换)两部分。在分解与变换中将非平稳信号变为平稳的信号[8]。相比传统数据处理,改善了线性与平稳性的局限,对于非线性非平稳的信号也可进行分析且具有完全自适应的优点。与此同时,借助Hilbert变换可求取得到瞬时频率,可更好针对局部性进行研究。
滚动轴承故障的高频发生点在内圈、外圈及滚动体上。当遇到故障时,振动信号的特征频率常出现明显的变化,同时振动信号各频带的能量也发生着变化。在采用经验模态分解后,每一个IMF项中包含的频率成分不仅与采样频率相关,它还跟随信号本身变换而变化。按信号中不同尺度的波动或趋势级进行分解后发现,前几个IMF分量最为显著。由此可见,该方法适用于对滚动轴承的振动信号分解。
1.2 经验模态分解
经验模态分解(EMD)是一种针对非线性、非平稳信号进行局部筛选的过程,它的提出赋予瞬时频率以合理的定义与物理意义[9]。该方法将任意信号进行特定包络分解从而获得若干个固有模态函数(IMF)与一个余项,保证每个IMF项为单独的幅值或频率信号必须满足如下两个条件[10,11]:
(1)在整个数据序列内,所有极值点个数与过零点的个数必须是相等或仅相差一个。
(2)关于时间轴局部对称。信号中任意一点,其局部上下包络线的均值都为零。
由此,EMD的分解步骤如下:
步骤一:计算原始信号x(t)的所有极值点,并确定上、下包络线。
步骤二:根据每个时间点,求得对应上下包络线的均值,记做μ1(t)。
步骤三:提取出包络均值信号y1(t)。
步骤四:判断此时y1(t)是否为IMF项,满足则完成第一次迭代。如若不足以形成IMF项则进行循环操作,直至获得第一个IMF,即IMF1。此时,IMF1代表原始信号x(t)中最高频,记做m1(t)。
步骤五:从原始信号中剔除IMF1得到新一组信号r1(t)。
步骤六:对新信号r1(t)进行循环操作上述步骤,可得如下结果:
(1)
直至rn(t)单调函数无法进行分解时循环停止。最终,原始信号x(t)可分解为n个IMF项与一个剩余项,即
(2)
此时,rn(t)作为剩余信号,代表信号的平均趋势。
1.3 希尔伯特变换(Hilbert变换)
在经验模态分解的基础上,对每个IMF分量信号进行Hilbert变换可以得到对应的瞬时频率[12-14]。对每个IMF分量mi(t)做Hilbert变换可得
(3)
式中:H(t)表示Hilbert时频谱;P表示柯西主值。
mi(t)的解析信号Z(t)为
Z(t)=m(t)+jH(t)=A(t)ejθ(t)
(4)

从而可以得到瞬时频率ω:
(5)
综上,在分别进行Hilbert变换后,原始信号x(t)可以作如下表达:
(6)
式中:H(t,w)表示在Hilbert空间中时间与瞬时频率的函数,即HHT时频函数;bi表示开关因子。
2 Elman神经网络
Elman神经网络算法是一种典型局部的回归网络,实质为反馈神经网络,具有联想记忆功能和强大的计算功能。常见的Elman神经网络结构有输入层、隐含层、连接层和输出层,如图1所示。与BP神经网络的不同在于增加了连接层,可构成局部反馈,增强模型准确度[15-17]。鉴于,Elman神经网络普遍存在的缺点,即输入层样本数量多时易造成收敛变慢,出现局部最优的现象。为此,本文改善了这一缺点,在输入前运用HHT法对数据进行处理及筛选并在网络输入层增加可调节时延。

图1 Elman神经网络结构图
对应网络数学表达式如下:
y(k)=g(w3x(k))
(7)
x(k)=f(w1xc(k)+w2(u(k-1)))
(8)
xc(k)=x(k-1)
(9)
式中:y为输出向量;x为隐含层向量;u为输入向量;xc为连接层向量;w3为隐含层至输出层权值;w2为输入层至隐含层权值;w1为连接层至隐含层权值;f(x)为反馈环节传递函数,g(x)表示输出层的传递函数。
Elman神经网络算法的判别误差函数为
(10)
式中:d(k)为实际输出;y(k)为模型预测输出。
输出层对应公式为
y(t+1)=g(netm(t+1))
(11)
netm(t+1)=∑w1(t+1)xn(t+1)
(12)
隐含层连接层对应公式为
xn(t+1)=f(netn(t+1))
(13)
netn(t+1)=∑wi(t)vi(t)
(14)
式中:net()表示各层的净输入;t为所设定迭代次数,其他同上。
3 基于改进Elman神经网络的故障诊断模型
针对本文提出的诊断模型如图2所示。数据处理及特征提取所选的方法为HHT变换,选取Hilbert变换得到相应包络谱作为表征故障的特征量,即输入变量集X。同时,对输出故障类型标注标签,便于后期故障模型的输出能够清晰表现出故障类型。最后,根据输入的变量维度确定网络输入层时延长度且自动在对应位置增加时延,形成改进的Elman神经网络故障诊断模型,即可得到较为精准的模型输出集Y。
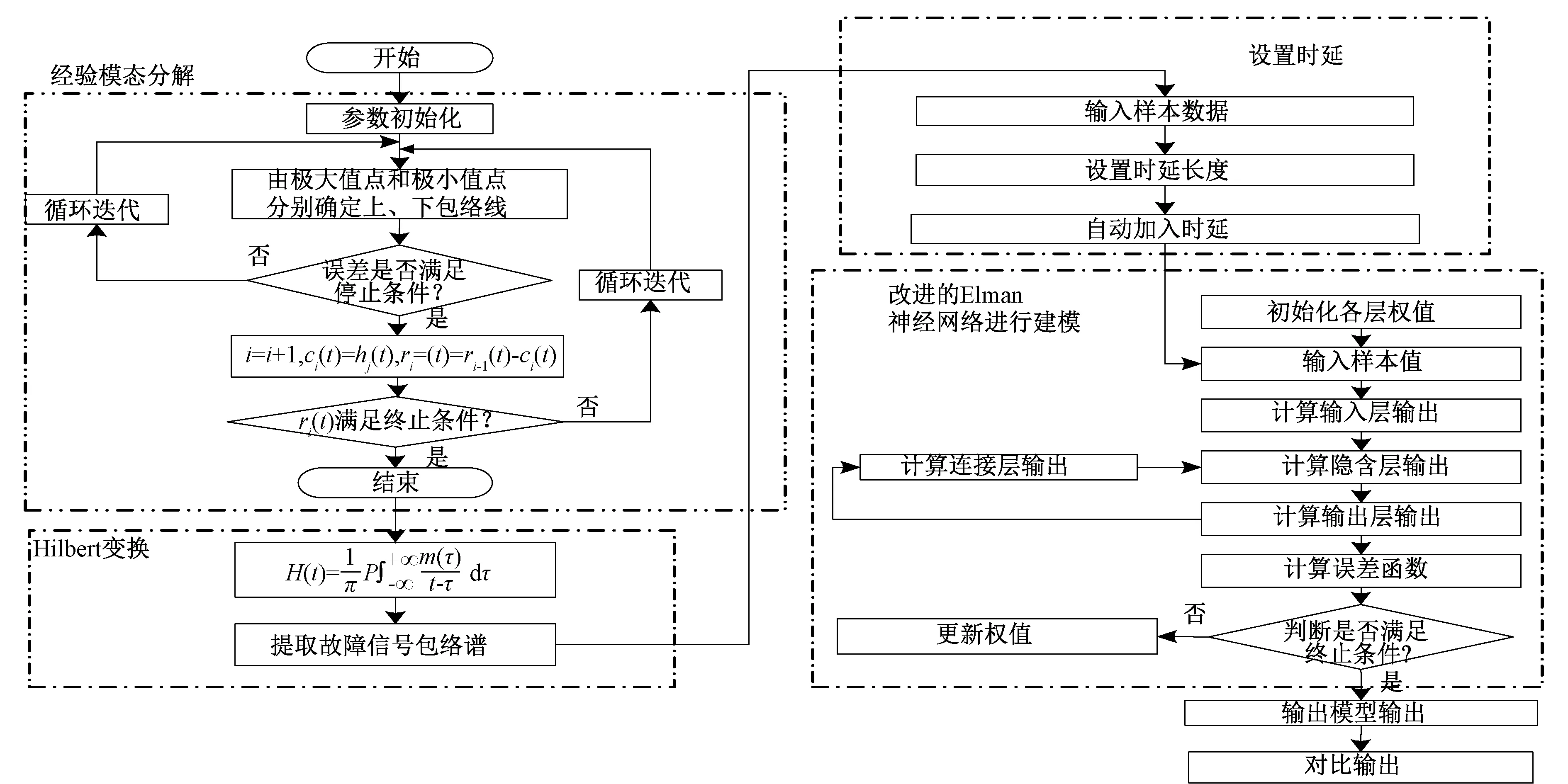
图2 基于改进Elman神经网络的故障诊断模型
4 实例验证
4.1 数据来源
为验证使用该故障诊断模型的有效性及故障诊断的效果,对凯斯西储大学轴承数据(CWRU)进行实验,该实验故障数据通过电火花对测试轴承设置故障并加入多个传感器进行记录。在此,选取采样频率为12 kHz下的SKF6205测试轴承驱动端振动信号,并采集对应的信号数据。本文实验数据集选取正常状态及故障直径在0.007 inch故障深度为0.011 inch的5种故障状态作为实验数据。5种故障状态分别包括内圈故障、滚动体故障及外圈的三个方向故障(中心方向、正交方向与相对方向)。由于,实验数据集由连续的振动信号组成,即将数据每连续2 048个振动信号划分为一组样本,具体样本数在表1中所示。

表1 实验样本数据说明
4.2 数据处理及特征提取
对于每一个驱动端振动信号样本,故障信号相比于正常信号而言,常表现出能量高且随故障程度的变化出现相应改变。一般而言,一段正常的振动信号主要频率表现在低频段,而出现故障时则会主要集中到高频段。由此,可提取出高频段信号来表征特征。由于数据量较大的原因,在此只列出正常轴承状态与轴承内圈故障状态的一组样本的详细特征提取,其余样本做同种处理。
负载0马力工况下,对正常轴承驱动端采集的一组振动信号(如图3)做标准化处理后分解得到对应IMF项,每个IMF分量代表着信号中不同频带的特征信息。EMD分解结果如图4清晰展示出,IMF1为最高频段并按顺序依次递减。在此基础上,通过先希尔伯特变换得到包络信号后进行快速傅里叶变换的方式确定故障特征点。考虑到,包络谱对故障信号较为敏感,对故障频率容易辨别的特性,每组故障特征量选用前5个IMF对应的包络谱首尾相连进行表征。从图5正常轴承驱动端第一组样本包络谱幅值变化图中能有效剔除其他频率的干扰,使故障特征点的表征清晰明了。

图3 正常轴承驱动端振动信号

图4 振动信号EMD分解结果

图5 正常轴承驱动端第一组样本包络谱幅值变化图
与上述数据处理过程一致,在0.007 inch的故障直径下,测试轴承内圈驱动端振动信号、EMD分解结果及Hilbert变换所得包络谱分别如图6、图7、图8所示。

图6 故障轴承内圈驱动端振动信号

图7 振动信号EMD分解结果

图8 故障轴承内圈驱动端第一组样本包络谱幅值变化图
综上,在同工况下对一组样本的每种状态轴承驱动端振动信号进行信号分解所得参数说明在下表2中列出。了解到轴承故障时的振动信号常集中在高频段且IMF过多会对诊断速度造成影响的原因。故,仅提取每个样本前5个IMF项进行Hilbert变换后得到的包络谱作为表征故障的特征量,每种状态的一组样本可以得到5 120个特征点,在表3中列出相对应的部分故障特征数据。

表2 EMD信号分解参数说明

表3 部分故障特征数据
4.3 模型验证与比较
为了更好验证本文所提方法的诊断效果,本文选取神经网络中的BP神经网络与小波神经网络及Elman神经网络进行比对。将354组数据划分为250组训练样本和104组测试样本,输入层数为5 120,网络迭代次数为2 000次,误差容限为0.000 01,训练函数采用有动量和自适应的梯度下降法的traingdx函数。
就神经网络识别的准确性而言,对隐含层数的选取至关重要。结合相关知识并经过多次试验如图9所示,了解到隐含层节点数并不是层数越多稳定性越好,节点数过多反而会造成“过拟合”的现象出现。针对本研究对象的验证可发现,选择隐含层节点数6层时,BP神经网络与小波神经网络及Elman神经网络进行网络预测较为稳定,能表现出较好的诊断效果。

图9 不同神经网络对样本测试结果
本文使用均方根误差(ermse)、相对误差(emre)及诊断时间作为的评价指标可保证对比实验更具说服力。误差越小,诊断效果越好;诊断时间越短,越便捷。对应计算公式为
(15)
(16)
式中:λk表示实际输出;yk表示模型预测输出。
在改进的故障诊断实验中,输入变量集为特征表征量,输出集为根据故障类型标注的标签。表4为在网络输入层对应位置每隔20,30,40,50间隔设置时延及无时延状态下进行网络测试相应对比结果。
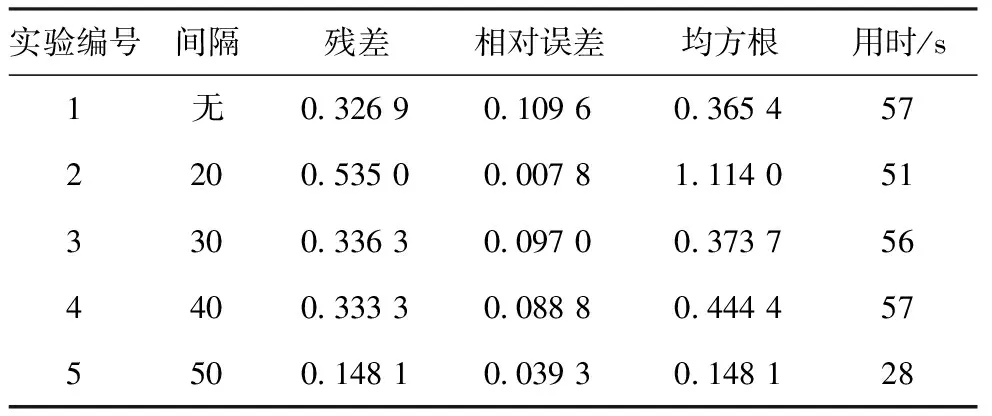
表4 各状态下网络测试结果比对
由表4可清晰的看出,在针对本实例对象时,网络输入层每隔50间隔输入设置时延,测试结果最好。下文的改进实验均选此种设置,该模型对样本测试结果如图10、图11及图12、图13所示。可见,该方法对训练样本的测试结果能达到无误差状态且对测试样本的效果也较好。

图10 训练样本测试结果对比

图11 训练样本测试结果残差
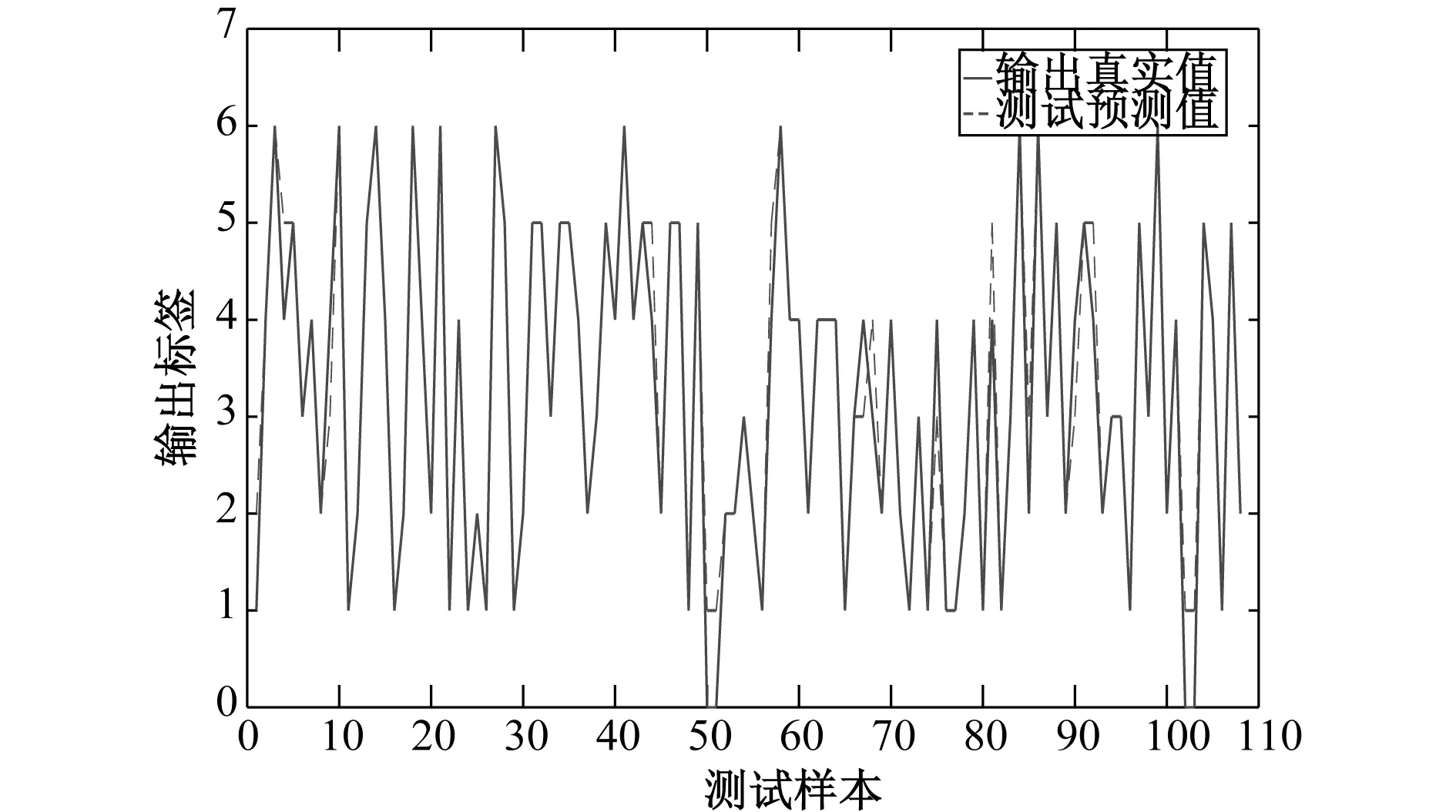
图12 测试样本测试结果对比

图13 测试样本测试结果残差
对不同模型进行对比实验,结果在图表中可清晰展示。各模型输出值与理想值对比(图14)及各模型误差比对结果(图15)中,可看出改进后的HHT-Elman神经网络模型的故障判断效果最好,与实际输出重合点最多,其次是HHT-Elman神经网络模型的效果。表5为各模型性能对比表可更清晰直观印证这一结果。

图14 各模型实际值与预测值对比

图15 各模型输出相对误差

表5 各模型性能对比
本文考虑到实际工况中会遇到各种不同的外界环境,为更好验证改进的故障诊断模型具有高效的适应性。由此,在0马力、1马力及2马力工况下,分别进行实验对比,实验结果如图16及表6所示。由此可清晰的看出,改进的故障诊断模型在不同的工况下,误差较小且用时稳定,可达到相对稳定的诊断效果,诊断精度较高,适用性广。

图16 不同工况下模型输出相对误差

表6 不同工况下模型性能对比
5 结 论
通过对比实验结果,可知HHT算法可得到输入特征向量集并降低其维度,大大减轻了网络计算量,高效降低网络训练时间。同时,Elman神经网络增加的连接层能构成局部反馈,达到提高模型准确度的效果。在此基础上,改进网络输入层,适量时延,便能够达到精准的故障判断结果。
综上,在滚动轴承的实验中,可以看出本文提出的改进Elman神经网络故障诊断模型具有很好的判断效果,准确率高的同时判断时间短,拥有广泛的应用潜能。
