基于光流传感器和惯性导航的全向移动平台双闭环控制研究
2021-02-02王道累孙嘉珺柴萍萍徐凌弘刘易腾
王道累, 孙嘉珺, 柴萍萍, 徐凌弘, 刘易腾, 韩 洋
(上海电力大学 能源与机械工程学院, 上海 200090)
随着计算技术和微处理器等技术的发展,智能化技术发展越来越迅速,智能机器人的应用也越来越广泛。机器人的巡检运动和定位方式作为机器人的主要功能成为研究机器人学应用的热门方向。因此,如何运用相应的控制技术、传感器融合技术和视觉技术等成为研究轮式巡检机器人发展的主要课题之一。
目前相关人员在轮式移动发展[1]和传统视觉目标跟踪算法的基础上[2],针对视觉追踪等问题提出了新的算法,以便克服干扰;同时也有在传感器中使用数据融合技术[3],精准获得信息采集,再通过相关控制算法,结合信息融合技术,以确定障碍物的种类。
本文研究的主要目标是实现全向移动机器人的位姿确定和移动控制。在数据获取方面,利用光流传感器、惯性导航,通过各个传感器读取与处理信息;在结构分析上,对麦克纳姆轮的结构和移动特点进行了分析和建模,搭建了实物模型,并运用相应的传感器技术,获得了传感器相应技术、单片机和全向机器人结合的现实成果;在控制上,以各个传感器获得的数据为基础,获得了移动平台所需的所有位姿信息,再利用双闭环控制来实现移动平台的相应位姿变化控制,并通过实验调整控制参数,以适应最佳的控制要求。
1 基于光流传感器的位置数据获取
本文使用的光流传感器为是ADNS-3080光流传感器,能够感应速度高达101.6 cm/s和高速移动的加速度达15 m/s2。通过光学的技术获取连续的表面图像(帧)并在数学上确定移动的方向和大小,不需要精确的光学对准。
在光流算法中,一般以两个基本条件为假设前提:一是亮度恒定,随着时间变化,邻近帧间同点的光亮度不改变;二是小运动,邻近帧间物体的运动持续,变化非常小。
在光流算法中,以上两个条件是光流法使用过程中都要遵循的假设条件,在现实实验中,需要基本符合这两个条件。本文采用Lucas-Kanade(LK)光流算法[4]获取瞬时速度数据。
基本的约束条件列写方程为
I(x,y,t)=I(x+dx,y+dy,t+dt)
(1)
式中:I(x,y,z)——第一帧的光强度。
在假定运动了(dx,dy)的间距到下一帧的前提下,应用了dt的时间,又假定同一个像素前后光照度一致,因此式(1)等价条件成立。
将式(1)右端开展泰勒展开可得
(2)
式(2)化简后同除以dt获得式(3)
(3)
利用u和v分别设定x轴和y轴的速度矢量
(4)
分别用Ix,Iy,It表示图像中像素点灰度沿x,y,t方向的偏导数
(5)
综上可以得出式(6),即
Ixu+Iyv+It=0
(6)
在实际使用中,均需要从图像数据中获得u和v,但在当前约束等式下,没办法解出u和v的准确值。这时要引进其他约束来开展求解。
而在LK光流算法中,在两种假设的基础条件下,又添加了第3个条件——一个帧的图像具备近似同样的运动,以确保全部像素均有相似的运动。以此假设来解决式(6)无法求解的问题。文献[5]研究了利用3×3的窗口内的9个像素点来建立9个方程,可以写成如下形式
(7)
写成矩阵形式

(8)
应用最小二乘法对式(8)开展综合性求解
(9)
通过上述累加邻域像素点在3个维度的偏导数并做矩阵运算,可以有效获得光流矢量数值(u,v)。
2 基于惯性导航的角度数据获取
为了获得全向移动平台的全部姿态信息,需要额外的传感器来获取移动平台转角信息。
MPU-6050运动处理传感器集成了三轴MEMS陀螺仪和三轴MEMS加速度计,以及一个内嵌的数字运动处理器DMP。下面将从陀螺仪和加速度计的原理和数据处理算法展开。
2.1 基本原理
三轴陀螺仪原理为:通过测量三维坐标系内陀螺转子的垂直轴与设备之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态[5]。
加速度计原理为:加速度计精确测量一条直线上的加速度,一般在静止状态下,可以通过计算重力加速度的各个角度关系来检测出所需要的当前被测物体在空间中的旋转状态[5]。
2.2 数据处理算法
在应用MPU6050中的MEMS陀螺仪时,普通情况下欧拉角可以通过MEMS陀螺仪直接来计算加速度,具体为
(10)
Øt=Øt-1+v×ΔT
(11)
式中:v角——实际角速度;
v输出——陀螺仪的输出值;
Øt,Øt-1——当前和上一时刻累计的角度;
ΔT——采样固定周期。
通过式(10)中陀螺仪的输出值v输出获得的实际角速度v角,再根据式(11)来获得角度。下面将详细描述通过三轴加速度计所获得的数据来解算出欧拉角的一个过程。
首先根据加速度的输出值,计算得到当前的实际加速度a为
(12)
在各个方向上获取的数据需满足条件:模长|a|=g,与重力加速度大小相等、方向相反。
(13)
式中:x,y,z——重力三轴的分量。
(14)
(15)
式中:Ø——翻转角Roll角,为加速度向量与其在xz平面上投影的夹角;
在通过三轴陀螺仪和三轴加速度计分别获得所需的转角信息后,就可以应用互补融合算法来获得移动平台所需的精确转角信息以提供控制所用。
3 全向移动平台机械结构分析
本次实验采用配备有4个麦克纳姆轮[6]为移动机构的全向移动平台作为主要的研究对象。以此平台装配各个传感器、主控和电机等部件,最后装配形成本次试验所需的硬件设施。麦克纳姆轮结构如图1所示。

图1 麦克纳姆轮结构
3.1 速度解算
当4个麦克纳姆轮组成底盘时,计算麦克纳姆轮的速度是实现对各个轮子的调速来控制移动机构整体中心速度的基础。

(16)
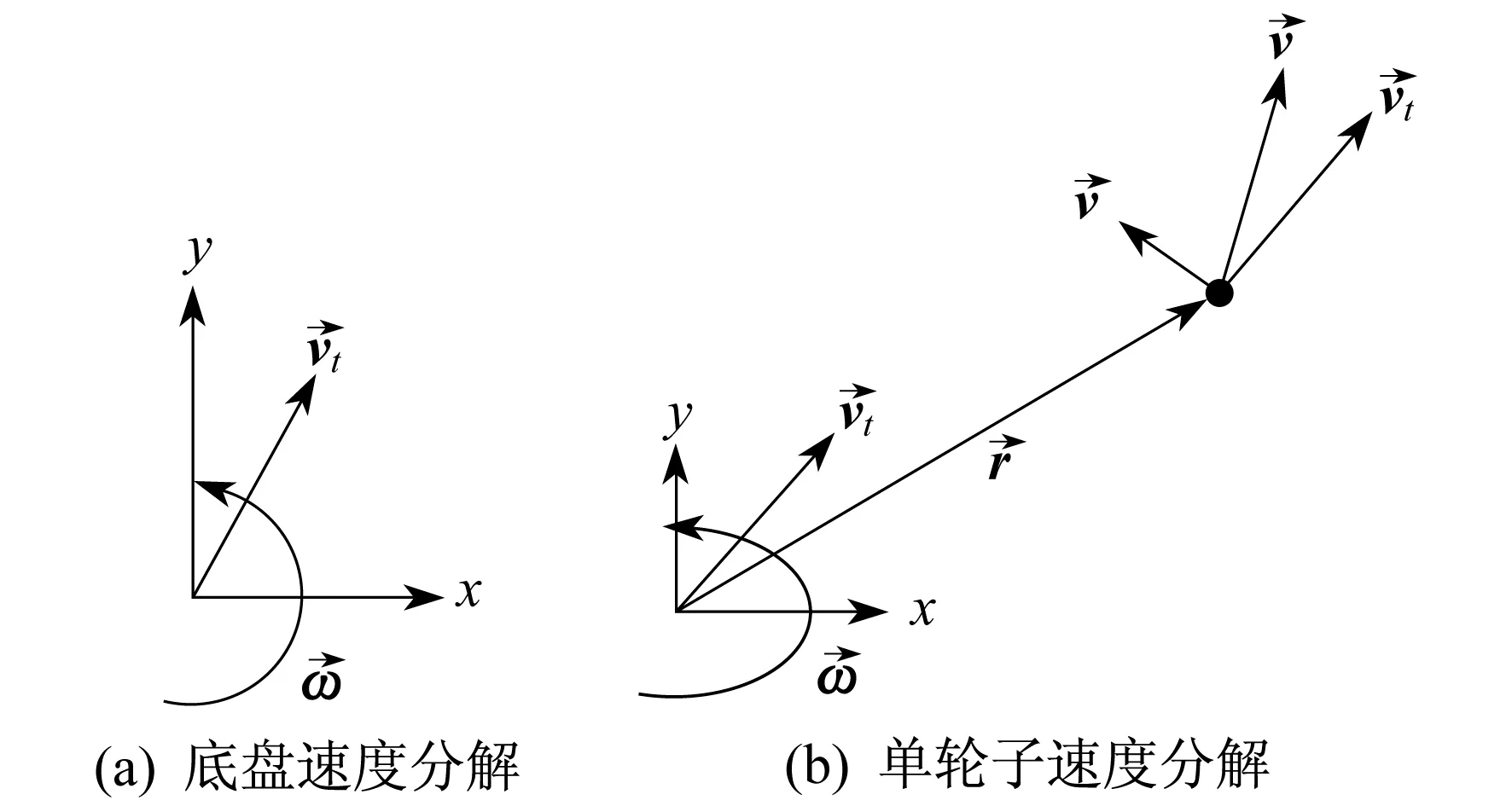
图2 麦克纳姆轮运动速度计算
同时再分别计算x轴和y轴的分量[3]
(17)
式中:ry,rx——x轴和y轴的间距的一半。

(18)
再通过式(18)计算最终需要的轮子的转速[3]

-vx+vy
(19)
将式(17)代入式(19)进行等式整理,获得单个轮子的最终转速信息[3]为
(20)
式(20)为O-长方形麦轮底盘的逆运动学模型方程[7-10]。综合上述等式,根据底盘的3个状态信息来解算出4个轮子各自的转速信息。
4 仿真和实验
本文采用ADNS3080光流传感器布置于平台底部中心,与地面距离0.12 m。为充分保证周围的环境光照强度,在移动平台底部的ADNS3080周围布置2个5 W的LED灯,同时设置纹理分明且较为平坦的桌面作为采样面。
首先对x轴和y轴速度和距离进行单独正向采样测试,采样点数量大致在200,得出的数据曲线如图3所示。同时对一段轨迹进行测试,得出的数据曲线如图4所示。用以上同样的方式来测试YAW偏航角,测试结果如图5所示。
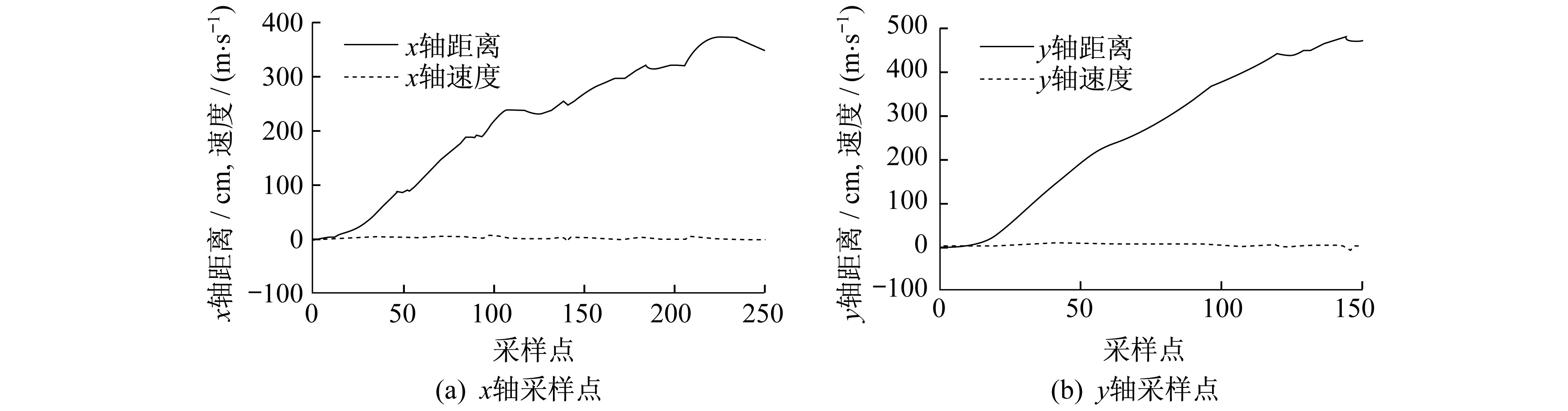
图3 x轴和y轴的数据曲线

图4 对一段轨迹测试得出的数据曲线

图5 YAW偏航角测试结果
单环控制PID算法[6]为
Ppwm=Kp×e(k)+Ki×∑e(k)+
Kd×[e(k)-e(k-1)]
(21)
式中:e(k)——当前计算偏差值;
e(k-1)——前一次计算偏差值。
在此次双闭环控制的参数调节中,调节两环的参数以先内环后外环为准则。此次控制实验主要通过Simulink仿真的形式来进行,以模拟速度解算环节和双闭环控制环节。其仿真示意如图6所示。
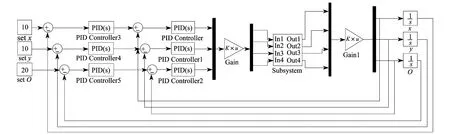
图6 Simulink仿真
本研究中,单独对YAW的控制进行参数整定,设定移动平台的位置目标值为20。在对双闭环进行参数整定时,首先对外环的位置环进行参数整定。将外环控制器调整保持比例调节系数Kp=1,再对内环的控制参数进行整定。在位置环的调节中,对Kp进行单独调节,分别选择不同的Kp来观测YAW的角度和角速度的变化情况,结果如图7所示。
由图7可知,随着内环比例调节系数Kp的增加,系统的调节时间和上升时间都有非常显著的提升,在选择内环比例环节调节系数Kp=0.3时,可以在不产生超调量的同时又保持较好的响应速度。
在单独测试完内环的调节后,将较为适合的比例调节系数Kp=0.3作为外环控制器的固定值。以此为基础进行外环的测试,速度环也将从纯比例环节开始进行。不同外环比例调节系数Kp下的角度和角速度变化情况如图8所示。
由图8可知,外环的纯比例调节系数Kp的改变能够非常明显地改变底盘角度的输出特性。当比例调节系数Kp从1到2.2变化时,YAW的响应速度有着非常明显的提升,但达到目标速度后存在稳态误差。因此,本试验中内环控制还需要引入积分环节用以消除稳态误差。
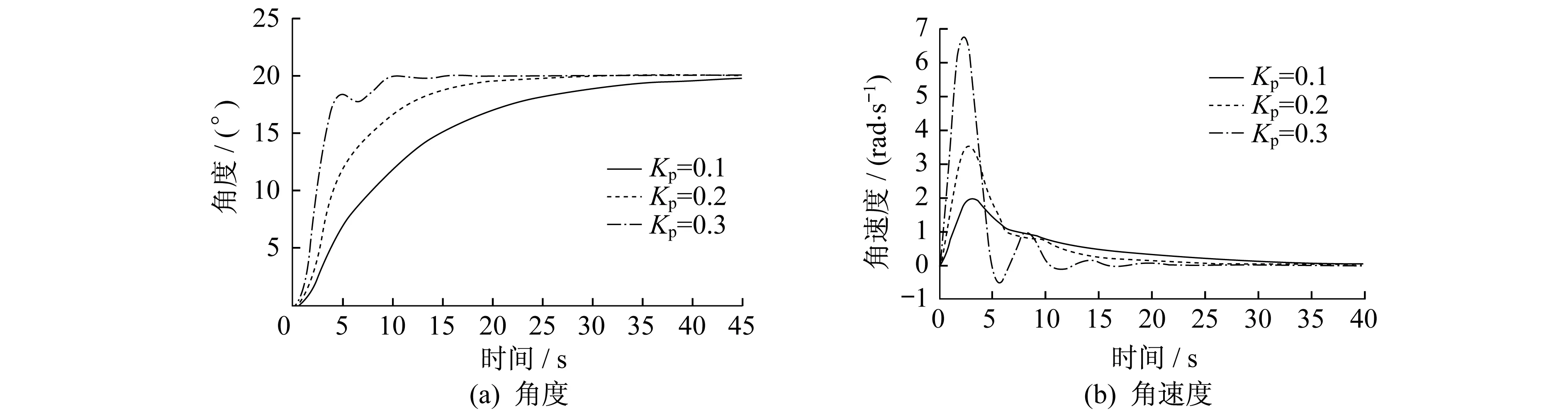
图7 不同内环比例调节系数Kp下的角度和角速度变化曲线
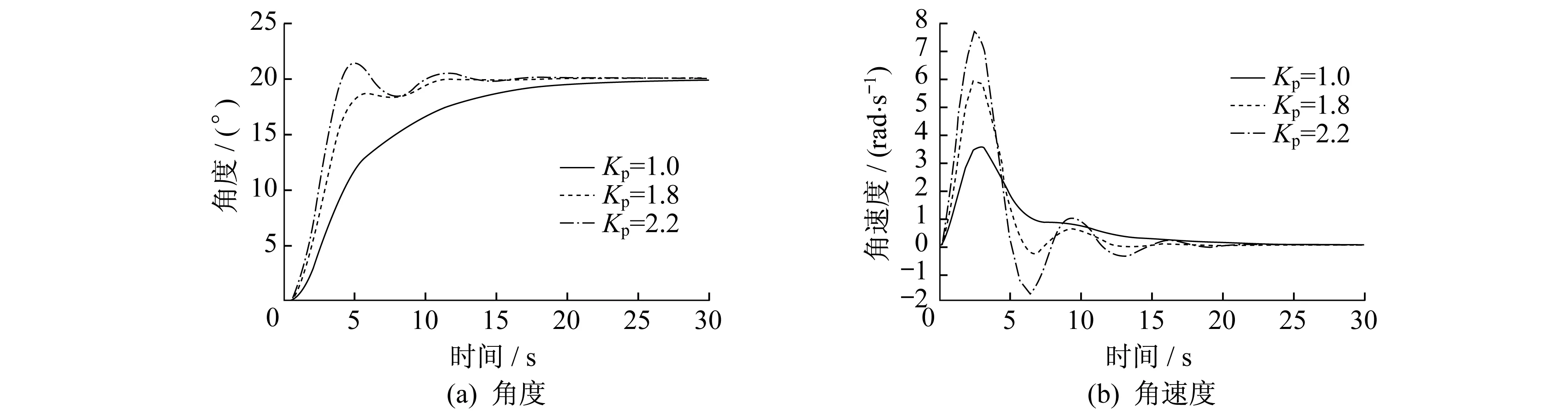
图8 不同外环比例调节系数Kp下的角度和角速度变化曲线
首先固定比例环节Kp=1.8,再加入积分环节,通过调节后,选择积分调节系数Ki=0.1,其响应曲线如图9所示。由图9可知,加入积分环节后能够非常有效地消除稳态误差,提高系统整体的稳定性,并在运行过程中能够非常有效地将YAW稳定至20,且保持良好。

图9 不同外环积分调节系数Ki下角度和角速度变化曲线
5 结 论
本文基于多传感器数据获取和双闭环控制,通过对移动平台的速度解算获得底盘与四轮子转速之间的转换关系,然后利用获得的全向移动平台姿态信息,通过双闭环串级控制来进行姿态控制。在研究的整个过程中,得出以下结论:
(1) 通过光流传感器来获得所需要的x轴和y轴距离数据,在使用LED灯提供持续光照条件下移动10 cm存在1~2 mm的误差,因此短距离移动对实验的影响非常小;
(2) 本次实验中,底盘的各个坐标轴方向上的速度能通过运动学的方法解算到每一个轮子上,麦克纳姆轮存在的结构优势也是全向移动实现的基础;
(3) 双闭环控制能够在系统中同时控制两个关联的状态,可以通过内外环参数的调整来改善系统整体的性能,同时扰动和误差也能得到非常好的解决。
