三相T型逆变器有限控制集模型预测控制策略
2021-02-01刘述喜杜文睿苏新柱
刘述喜, 杜文睿, 王 毅,苏新柱
(1.重庆理工大学电气与电子工程学院,重庆 400054;2.重庆市能源互联网工程技术研究中心,重庆 400054)
人们日常对能源的使用量与日俱增,而不可再生能源的储备量日益减少。开发利用可再生能源显得越来越重要。光伏、风能发电就是一类非常重要的可再生能源[1-3]。并网逆变器作为直流发电设备与电网的连接设备,在电网系统中非常重要,因此,研究一种控制高效、简单的并网逆变器控制方法成为逆变器控制研究领域的热门。
目前主要的逆变器控制方法较多,有PI控制、谐振控制、滞环控制等。近年来,模型预测控制方法中电流预测、功率预测等也使得逆变器性能得到了显著提高[4-8]。最近几年,有限控制集模型预测控制(finite control set-model predictive control,FCS-MPC)这一算法在该领域中的研究也引起了诸多学者的重视。有限控制集模型预测控制充分利用电力电子变换器的离散化特点,考虑到电力电子变换器的有限种开关状态(变换器具有特定种类的开关组合),用一个代价函数(cost function)对每一种行为(开关组合)预测结果进行评估,选择能满足代价函数最小的开关组合来实现对电力电子变换器的控制,还具有无需采用调制器的优点。文献[7-8]研究过程中则指出,对于dq坐标系而言,算法在控制过程中体现出良好的动态特点,但是由于会存在一定耦合的现象,为此要加入解耦运算这一环节。文献[9-10]给出了使用预测控制模型仿真针对多个目标进行整定的方法,通过调整权重因子来实现各种参数的控制,但此种方法需进行大量的计算。文献[11]提出将共模电压的公式加入代价函数中进行整定,以此种方法来实现抑制共模电压。文献[12]通过在有限集模型预测控制中加入主动阻尼算法,起到消除电网电流低次谐波,降低对电网电压失真敏感度的作用。文献[13-14]将开关频率相关计算加入代价函数中进行整定,使逆变器开关器件的开关频率得到降低。文献[15-16]提出将FCS-MPC控制应用于更多电平的拓扑结构,以此提高逆变效率。但高电平结构使得代价函数的整定运算更加复杂。目前,国内外针对基于LC滤波器的三电平逆变器预测控制进行了大量研究,使其整定计算更加简便,但针对采用LCL滤波器的三电平逆变器预测控制的研究不多。
针对有限控制集模型预测控制在LCL三电平逆变器中的运用,提出一种简化传统模型预测算法。本文提出的这一算法能够借助于参考电压矢量空间位置,通过参考电压矢量扇区选择的方式让算法速度进一步提高。采用快速FCSMPC算法,通过公式求得电网侧电流,无需使用电网侧电流传感器,减少了传感器的使用,在实际应用中让逆变并网电路搭建更加简单,处理速度更快。
1 T型三电平逆变器数学模型
T型三电平并网逆变器拓扑结构如图1所示。

图1 T型三相三电平并网逆变器基本拓扑
与传统的一些滤波器相比,LCL滤波器的滤波效果更好。它是一种三阶滤波器,具有良好的高频衰减特性。它由逆变器侧电感L1、滤波电容C、电网侧电感L2组成。
图1中,Udc为逆变器输入电压;ic1、ic2、uc1、uc2分别为直流侧电容C1、C2的电流和电压;L1为逆变器侧滤波电感;L2为电网侧滤波电感;R1、R2分别为滤波电感L1、L2的等效内阻抗;C为滤波电容;ux为逆变器输出相电压;i1x为电感L1的电流;i2x为电感L2电流;uCx为滤波电容C的电压;ex为电网相电压;其中x=a,b,c。
使用Sx这个变量来表示x相的开关状态,定义开关函数Sx(x=a,b,c)为:

将O点设为电压中性点,在abc坐标系中,根据不同的开关状态逆变器输出每一相电压相对于中性点都有三种电平状态,以 A 相为例,当Sa1、Sa2同时导通,Sa3、Sa4同时关断时,ua=Udc/2;当Sa2、Sa3同时开通,Sa1、Sa4关断时,ua=0;当Sa3、Sa4同时开通,Sa1、Sa2关断,ua=-Udc/2。B、C相电平状态与A相类似。将abc坐标中的三相输出电压ua,ub,uc进行坐标变化。
则逆变器在αβ坐标系中的三相输出电压可用开关函数Sx与直流电压Udc表示:

根据以上分析得出,每相有3种不同的电压矢量,则三相有33=27种电压矢量,除去一些开关状态的冗余,可以得到19种不同的电压矢量如图2所示。在图2中,P指开关状态为1,Sx1导通时;N指开关函数为-1,Sx4导通时;O指开关状态为0,Sx2,Sx3导通时。例如图2中,NPO状态则为当Sa桥臂开关状态为-1,Sb桥臂开关状态为1,Sc桥臂开关状态为0时所产生的电压矢量。

图2 逆变器产生的电压矢量和开关状态
将LCL滤波器两个电感电流i1x、i2x以及电容两端的电压值uCx选取为状态变量。为了简化计算,建模过程中将Rd忽略,以该电网中的中点n作为电压零点的参考点,对应得出的在静止αβ坐标系下的状态方程表达如下,其中j=α,β:

2 有限控制集模型预测控制原理
式(3)是连续状态空间下的状态方程,由于有限控制集模型预测控制是在逆变器数学模型基础上开展的,需要对式(3)进行离散,借助于前向差分式(4)分析式(3)当中的离散情况,进而得到式(5)和(6)这两个空间预测的模型。

整理式(5),(6)可得到式(7):

从式(7)中可以看出,要计算此公式仍需使用电网侧电流传感器采集i2α,β(k)的值,多余传感器的使用不仅会使滤波器采样电路更加复杂,还会增加采样电路发生故障的概率。本文通过逆变器侧电流i1α,β(k)和滤波电容电压uCα,β(k)计算得出电网侧电流i2α,β(k)起到代替电网侧电流传感器的作用。根据逆变器状态方程(3)中第三个方程可以得出式(8):

可以看出,将i2α,β(k)传感器用公式替代后,并没有增加电流预测方程的复杂性,而在建模上可以提高逆变器的反应速度。
三电平逆变器存在直流侧电容之间的中性点因为充放电的问题产生电容电压不平衡的现象,如果不加以控制,会使逆变器出现输出电压谐波含量增加、开关器件电压应力不平衡等问题,为了抑制中点电位不平衡状况,需借助前向差分公式来处理两个直流侧电容对应的电压和电流值,通过使用KVL、KCL定律得出直流侧电容的电压电流方程:

FCS-MPC对比传统PWM控制的优势之一是不需要PWM调节,无需相关参数整定。但其在相关的周期内需要分别计算电流值、电压值以及27种开关组合状况并在计算后输出一种最优开关状态。整个过程需要耗费较长的时间,这也是在传统模型预测算法当中一个主要的缺点。


表1 每个扇区参与的电压矢量
整个模型在计算过程中,累积需要处理的电压矢量为12个,与传统方法相比,减少了12次计算和判断。通过上文的计算结果得出传统FCS-MPC控制流程如图3所示,快速FCSMPC控制流程如图4所示。

图3 传统FCS-MPC算法的逆变控制流程图

图4 快速FCS-MPC算法的逆变控制流程图
传统FCS-MPC算法的具体流程为:
(1)采样并通过Clark变换将静止三相坐标系下的量转换为αβ坐标系下的量。
(2)依次使用逆变器不同的开关状态计算式(7)、(11)得到逆变器侧交流电流在k+1时刻的预测值和直流侧电容电压预测值。
(3)将(2)中的计算结果代入式(14)对代价函数开展进一步的计算,当g小于初始设定的g值时,令gopt=g,iopt=i,i从0算起以使整个公式能进行27次计算,保证能使每个开关状态都代入代价函数进行计算。若此次计算得到的g小于上一个g值时,将g值赋于上一次的g值,否则不赋值。这样就能保证得到的g值一定为最小,从而判断出能使g最小时的开关状态,并将最小g值下的开关状态输出,得到最优解。
从图4可以看出,使用快速FCS-MPC算法的流程与传统算法大体一致,其区别为:
(1)采样环节无需采样变换i2abc(k)的值,降低并网逆变器采样电路复杂性。
(2)通过式(17)对参考电压矢量进行计算,并判断其所在扇区。
可以看出,虽然快速FCS-MPC算法在传统算法的基础上加入了角度判断,但是对于代价函数的计算减少了对15个开关状态量的判断,使预测算法的处理速度加快。
3 仿真验证及分析
根据以上的理论分析,采用MATLAB中的Simulink软件来进行整个仿真,相关控制算法采用m函数进行编程。具体仿真参数如表2。
将代价函数中控制中点电压平衡权重因子设为0.8。A相电压ea和并网电流i2a波形如图5所示。从图5看出,传统FCS-MPC控制的并网逆变器并网电流在启动后0.015 s趋于稳定,并且此时开始对电压相位进行跟踪。启动电流最大值达到了61.9 A。采用快速FCS-MPC控制的并网逆变器并网电流在控制启动后0.01 s快速跟踪上电网电压并稳定运行,启动电流最大值为22.5 A,与稳定后并网电流值相差很小。稳定运行时,三相并网电流为幅值21.5 A,频率50 Hz的正弦电流。通过对启动电流、跟踪相位时间进行分析可知,快速FCS-MPC控制方法相对传统FCS-MPC控制方法来说启动速度更快,相位追踪速度较快,同时在启动阶段内不会产生过高的冲击电流,因此也对相关设备起到良好的保护作用。

表2 并网逆变器仿真参数

图5 两种控制下A相电压ea和并网电流i2a
图6为三相并网电流波形。可以看出,传统FCS-MPC控制相较于快速FCS-MPC控制下的逆变器输出电流波形纹波更大,如果是理想情况,FCS-MPC控制器能够在每个采样周期内同时完成采样、计算、输出。然而实际上大量的计算会带来延时。由于传统FCS-MPC在代价函数最小值的判断上需要进行27次运算,导致应用的最优开关状态相较于快速FCS-MPC控制延时更大。
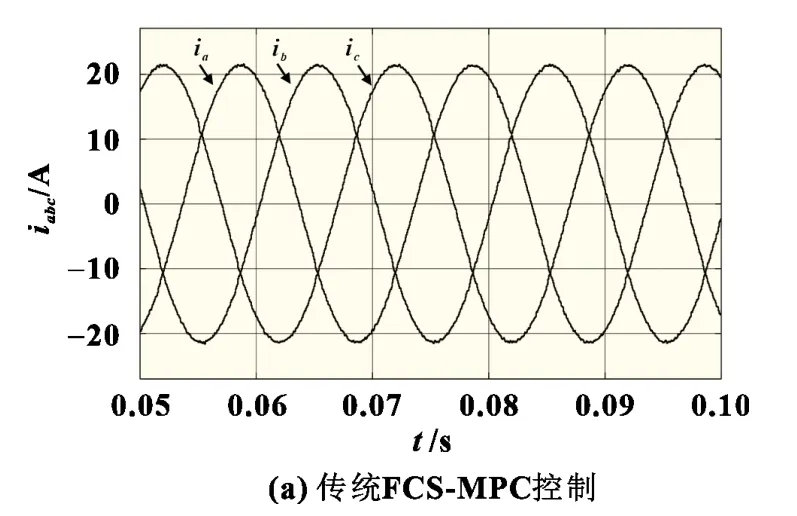

图6 并网电流波形
图7为两种控制方法下的并网电流总谐波失真(total harmonic distortion,THD)。

图7 并网电流THD
电网中的谐波会使损耗增加,引起设备发出噪音,干扰设备运行,所以降低谐波也非常重要。由图6可以看出,使用快速FCS-MPC控制方法的逆变器并网电流纹波更小。由图7可以看出,快速FCS-MPC并网A相电流THD值为1.06%,远小于采用传统FCS-MPC控制下并网电流A相电流总谐波失真THD值,其为1.84%。
图8所示为T型逆变器直流侧电容电压。从图8可以看出,电容C1、C2的电压值在±1 V之间波动,说明使用代价函数对中点电位控制效果良好。

图8 快速FCS-MPC直流侧电容电压
为验证两种控制方法的动态特性,进行功率突变实验。将额定功率在0.05 s时由10 kW提高到15 kW,得出额定功率突变时并网电流波形的比较如图9所示。

图9 额定功率突变时并网电流波形
仿真结果的对比分析表明,基于快速FCS-MPC控制的三相并网逆变器动态响应速度更快,在稳态时具有纹波较小、谐波较少的优点。可以看出,两种FCS-MPC控制的逆变器在额定功率突变时,并网电流都能快速响应,并能在短时间内达到稳定,但传统FCS-MPC在达到稳定前具有较大纹波,说明快速FCS-MPC具有良好的动态特性。
4 结语
本文在分析过程中,主要目的是提出一种改进控制集模型来开展预测,该方法对于传统FCS-MPC来说速度较快,在高电平逆变器的控制上更加简单。通过在三相三电平逆变器上的应用也发现其效果较好,在分析过程中构建了在三相坐标系下对应的电压、电流方程,直流侧中性点电压控制方程,在此基础上运用前向差分公式等建立了模型预测控制方程,同时也对部分传统模型进行了全面比对,最终得出以下几点结论:
(1)该快速有限控制集模型预测方法在传统有限控制集模型预测方法的基础上使用相关计算减少了采样器件的使用,具有一定的经济性。
(2)该算法通过对电压矢量角度的判断使所需计算矢量大幅较少,有效地提高了计算效率。
(3)通过两种有限控制集模型预测控制仿真对比得出,快速有限控制集模型预测控制相比传统方法在电流追踪、中点电位平衡、额定功率突变下都有良好的动态性能和稳态特性。
总而言之,快速有限控制集模型在实际应用过程中具备良好的预测控制效果,可灵活应用于高电平逆变器,克服了在传统计算过程中存在较多的失真等问题,加大了整个电网相位跟踪的速度。另外,其谐波失真状况出现较少,这也进一步为该算法后续的持续推广提供了理论的借鉴。
