小行星表面采样研究分析
2021-01-28肖道林张赵威
程 丽 肖道林, 张 超, 张赵威
(1.沈阳大学机械工程学院,辽宁沈阳110044;2.中国科学院沈阳自动化研究所空间技术研究室,辽宁沈阳110016)
0 引言
随着深空探测技术的发展,人类已经发现了大量的小行星。然而,人类并不满足于对小行星的远距离观测,而是希望能采集行星表面的土壤样品进行研究。目前,采用的探测方式主要有飞越、撞击、绕飞、表面原位探测和巡视探测,以及小行星的采样返回等。
本文对小行星表面特性与国内外的小行星采样器研究现状进行了调研,总结了国内外现有采样器的特点,并细致对比了各类采样器之间的差异。
1 国外小行星采样器研究现状
1999年2月9日,美国航空航天局(NASA)发射“星尘号”(Stardust),其主要任务是采集wild-2彗星的挥发物质和彗星附近的太空物质。Stardust由采集器和返回舱组成,其采集器是类似网球拍形状的结构[1],如图1所示。气凝胶附着在网球拍形状的结构上,在Stardust高速靠近彗星时收集粒子,采集器两面的粒子会在气凝胶中形成圆锥轨迹,使高速运动的粒子减速并逐渐停止,以确定粒子的来源(太空还是彗星)。Stardust于2006年1月15日返航,成功在地球着陆。

图1 Stardust上的采集器结构
NASA针对火星的探测研发了火星采样系统(SAM)。SAM(The Sample Analysis at Mars)对火星上的土壤进行实时分析,其搭载的SMS(Sample Manipulation System)系统是一种搭载了74个采样容器的欠驱动三自由度机器人系统,两个旋转自由度由中心轮毂执行器提供[2],如图2所示。此外,整套系统不论是在装配还是在其他方面,都十分注重防范样品容器的污染问题。
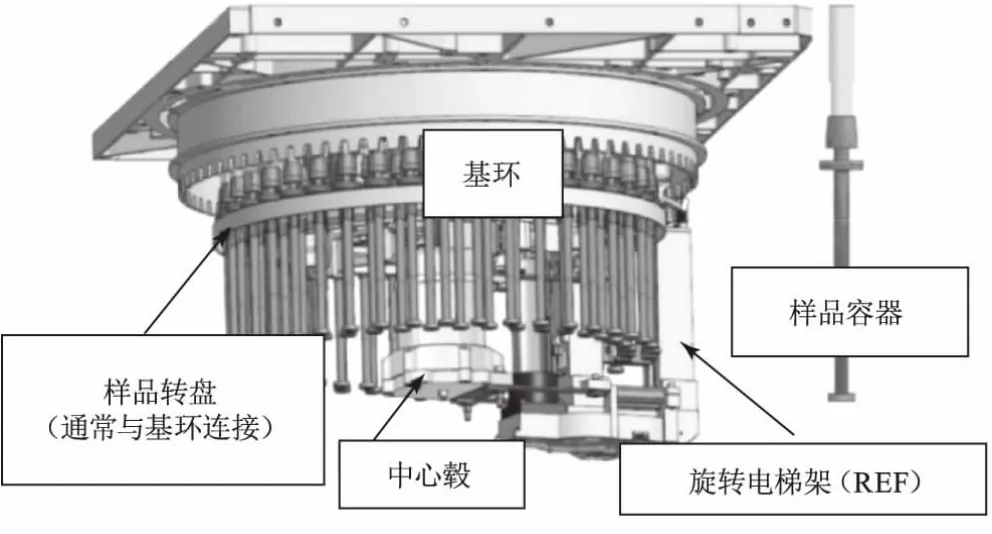
图2 SMS采样机构
2005年,日本宇宙航空研究开发机构发射了“隼鸟号”(Hayabusa)对Itokawa小行星进行采样。Hayabusa采用的是接触即走(Touch and Go,TAG)的采样方式[3],将探测器弹射到小行星表面并捕捉喷射物。当喇叭形圆筒的底端接近小行星表面时,抛射器通过火药的点火,把质量为5 g的钽弹加速到300 m/s。钽弹射向小行星表面后,星壤被迫溅射,被溅射起来的星壤只能在喇叭形圆筒这个密闭空间内运动,从而被收集进喇叭形圆筒中的样品储藏室。采样原理如图3所示。

2014年,日本再次发射采样返回任务探测器——“隼鸟2 号(Hayabusa 2)”对小行星“1999JU3”进行采样。Hayabusa 2于2018年到达目标小行星,计划于2020年带着样品返回地球。它的采样方式与Hayabusa完全一样,只不过是将样品储藏室由2个空腔改为3个空腔[4],如图4所示。
虽然增加了样品储藏室的空腔,但仍然携带了3个抛射器,进行3次采样。“隼鸟号”与“隼鸟2号”采样任务所使用的射弹弹头形状不同,将半球形弹头改为90°圆锥式弹头[4],弹头90°的设计会溅射出更多的星壤,有助于收集到更多的样品。
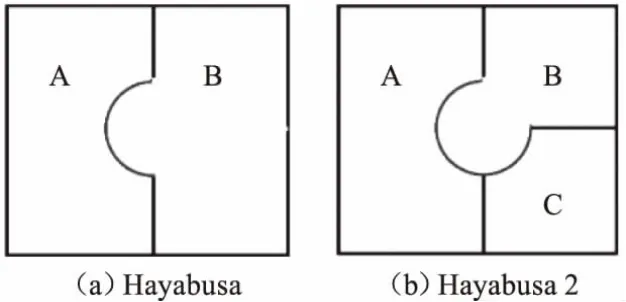
图4 样品储藏室对比示意图
2004年欧洲空间局将Rosetta探测器发射升空,Rosetta搭载了一个Philae着陆器,于2014年11月成功在彗星表面着陆。Philae上带有锚定装置,可防止着陆器在彗星表面微重力作用下翻倒或飘走。Rosetta的采样装置是一个钻取机构SD2(Sampler Drill and Distribution subsystem),该装置由电控装置和钻取机构组成。钻取机构集钻取和采样于一体[5],最大钻探深度为23 cm,在选定下钻的深度并完成钻探后,释放采样管进行采样,同时钻杆自转,将钻杆提起,完成采样过程。采样及其送样原理如图5所示。

图5 SD2采样及送样过程示意图
不同于Stardust与Hayabusa将样品带回地球,Rosetta直接在彗星表面完成分析,并将分析数据传回地球。
欧西里斯(Osiris-Rex)是NASA的一项对Bennu小行星的探测采样返回任务,其结构包括飞行器、机械臂和采样器,其中采样器即样品储存器。Osiris-Rex的采样器采用气体激励的方式[6],用机械臂上携带的氮气瓶对采样器进行气体喷射,经由采样器的导流管,吹起星体表面的土壤,完成采样,如图6所示。
在采样过程中,飞行器以缓慢的速度靠近目标星体,放出采样器并采集完样品后,经由机械臂带动将采样器放回返回舱中,由飞行器带回地球。
Triple F是欧洲空间局针对彗星的采样返回任务。计划于2018年4月发射升空,并于2023年中期到达彗星。Triple F任务飞行器采用的是TAG的飞行形式,计划在彗星表面不同的位置取样3次,所以采样器装有3个采样芯管[7](图7),并延续了Philae着陆器的特征,即通过芯管内的弹簧装置将弹射机构刺入彗星表面,在取样完成之后,芯管口有阻挡装置防止样品洒落,并将样品转移冷藏,最后送入返回舱。完成3次采样后,飞行器携带样品返回地球。

图6 氮气激励采样器原理示意图
对世界上典型采样任务的目标星体、飞行器的飞行方式、采样方式等进行汇总,如表1所示。
2 国内小行星采样器研究现状
我国的深空探测取样任务相较于国外起步较晚,目前还处于样机研发和理论研究的阶段,尚未发射飞行器去采集小天体表面土壤的样品。但国内已有科研机构和高校研发出采样器。
北京航空航天大学丁希仑教授团队研发了一种多功能的小行星采样器,主要采用螺旋钻进的方式对小行星表面松散的土壤和岩石进行采集[8]。钻进机构由旋转电动机和进给电动机驱动,主要功能是切削土壤岩石,为取样工作奠定基础。其中,旋转电动机主要负责控制钻杆的旋转,步进电动机主要负责控制钻取的深度。土壤岩石钻探好后,由安装在钻杆内部的取样管对样品进行取样,具体结构如图8所示。
气体激励式的小行星采样器是北京卫星制造厂有限公司研制的采样器,其主要由破岩机构和气体激励采样模块组成,如图9所示。
破岩机构主要用于增加岩石的破碎程度,以方便取样;气体激励模块(图10)则是利用高压气流将星体表面风化层的尘土与破岩碎屑吹进初级封装容器。该采样器的气体激励模块是一个圆形空腔,由初级封装主体、气流入口和气流出口组成。入口气路为1路,流道采用近似一维通道设计,有利于气流顺畅流通,使收集简单、可靠[9]。

表1 小天体采样任务对比

图8 钻进机构原理
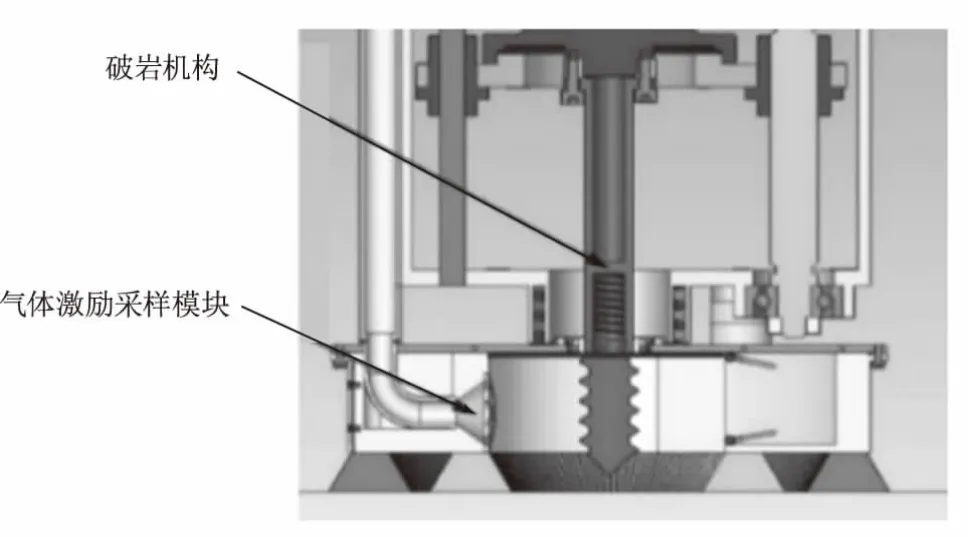
图9 气体激励式采样器结构
3 结语

图10 气体激励模块组成
综合国内外深空探测经验后发现,目前国内外普遍采用射弹撞击式、螺旋钻取、气体激励和岩芯管刺入式等方式进行采样。这几种采样方式需要降落在天体表面完成采样,采样时间较长,不能实现多点采样,且需要将采集到的样品转移到样品存储罐中封装保存,操作复杂,样品可能会遗失。另外,目前国内外的深空探测采样器体积都比较大,且结构复杂。随着深空探测任务的推进,采样器的发展会趋向于体积小、采样方式简单、采样时间短、采样量大的特点,同时还能实现同一小行星上不同地点的多点采样模式的建立。