一种基于BUCK拓扑结构的线性负反馈音圈电机驱动控制方法研究
2021-01-28傅旭东吴力涛
孙 凯 李 坤 傅旭东 吴力涛
(兵器214研究所,江苏苏州215000)
0 引言
音圈电机是一种特殊形式的直接驱动电机,具有体积小、结构简单、高速、高加速、响应快等特性,因而被广泛应用于车载、机载等各类武器系统中。其工作原理是,通电线圈(导体)放在磁场内就会产生力,力的大小与施加在线圈上的电流(电压)成比例,可通过控制施加在线圈上的电流(电压)控制电机的推力[1]。音圈电机可广泛应用于各类伺服驱动控制系统之中[2]。
本文对音圈电机的驱动控制技术进行了分析,设计了一种以BUCK开关芯片为核心,基于BUCK拓扑结构的线性负反馈音圈电机驱动控制方法,实现了对电机推力的精确控制,并通过系统仿真和实验验证了其可靠性。
1 BUCK拓扑结构分析
1.1 驱动方式分析
音圈电机常见的驱动方式主要有线性驱动和PWM(脉冲宽度调制)驱动两种[3]。线性驱动方式指直接通过线性功率放大器件对电机进行驱动控制,控制关系简单,输出电压连续且稳定,但功耗大,效率低,控制效果不佳。PWM驱动方式功耗小,效率高,但存在抖动问题,甚至会影响系统的动态性能。
1.2 电源拓扑结构分析
开关电源主要包括主回路和控制回路两大部分。主回路指开关电源中功率电流经过的通路,一般包含了开关器件、储能器件、脉冲变压器、滤波器、输出整流器等所有功率器件。控制回路一般采用PWM驱动方式[4],通过输出信号和基准的比较来控制主回路中的开关器件。
主回路根据结构特点,可以分为隔离式和非隔离式两大类。非隔离式主回路的输入端和输出端电气相通,根据主回路的结构特点,其具体又可以分为串联结构、并联结构和极性反转结构。隔离式主回路的输入端和输出端电气不相通,通过脉冲变压器的磁耦合方式传递能量,实现完全电气隔离,根据电路结构,其主要分为正激式和反激式两种。
根据类别的不同,常见控制方式的拓扑结构有很多种,包括BUCK型拓扑[5]、BOOST型拓扑、BUCK-BOOST型拓扑等。考虑到音圈电机的控制需要满足稳定、可靠、连续、输出电压范围广、输出电流连续等要求,选用BUCK型拓扑可较好地满足控制系统的需求[6]。
2 线性负反馈驱动控制技术分析
BUCK拓扑结构将已知的直流输入电压VIN转换成所需要的直流输出电压VO。其主要由输入电源、控制电路、开关管、储能电感、输出电容及负载电阻构成[6]。转换器通过产生一定频率、占空比的方波控制开关管的开启与关断,最后通过输出电感和电容进行功率滤波,得到所需要的直流电压。因此,可以根据反馈通路来检测输出电压和电流的状态,并据此精确调节输出[7]。基本拓扑结构如图1所示。
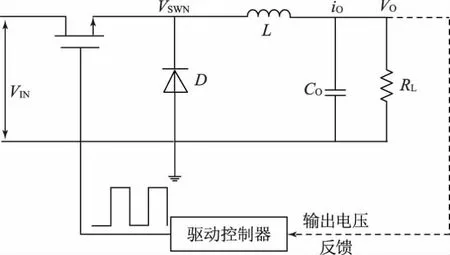
图1 基本拓扑结构
采用BUCK拓扑结构,引入输出负反馈控制,实现线性负反馈驱动控制系统的设计[8],控制系统结构如图2所示。
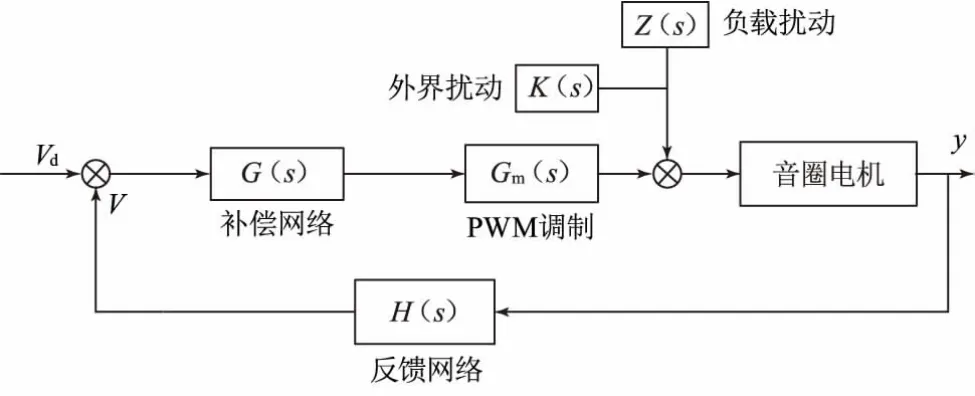
图2 控制系统结构
采用PWM调制方式,电路工作频率即开关周期T保持恒定不变,改变的是功率管的开启和关断时间,以达到稳定输出电压的目的,其基本原理如图3所示。输出电压经过误差放大器后送入比较器,与一个时钟产生的三角波或锯齿波电压进行比较,最后输出PWM控制信号,信号波形如图3所示。当输出电压发生变化时,PWM调制信号的占空比也随之变化,这样便实现了脉冲宽度调制。

图3 PWM控制原理及波形图
控制系统只有一个反馈环路,输出级相当于一个LC滤波网络,是一个二阶系统。当输出电压变化时,系统采样到电压的变化后,反馈环路开始响应,误差放大器的输出电压越大,控制方波的占空比就越大,开关开启时间就越长,输送到电感的能量就越多。此系统电路分析设计比较简单[9],具有成本低、体积小的特点,还具备占空比调节范围广、噪声性能好、负载调整率优良和易于在多路输出中实现交叉调节等优点。
3 控制系统设计及实验验证
为满足输出电压和电流能稳定可靠驱动的需求,本文设计了一种基于BUCK拓扑结构的以DC/DC变换器为原型的负反馈线性驱动控制系统[10-11]。
系统的电路主要由BUCK功率变换器、运算放大器、基准源、二极管、功率电感、电阻、电容等构成,电路原理如图4所示。
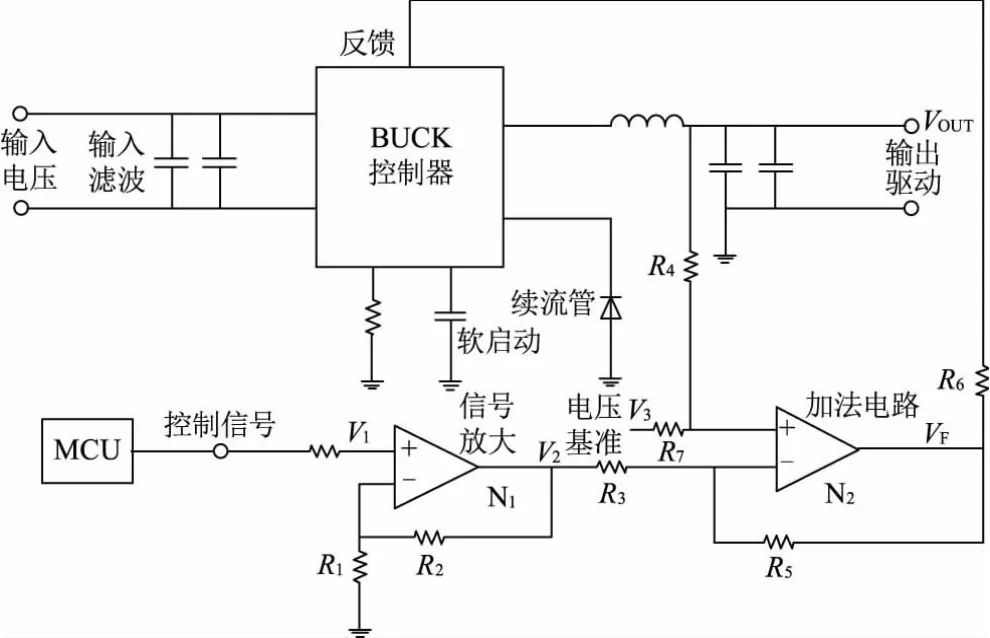
图4 控制系统电路原理图
根据BUCK电源的工作原理,通过检测反馈电压与内部基准电压的误差,调节功率输出的PWM占空比,使输出电压达到要求。
电路的工作原理如下:
输入控制电压V1至运算放大器N1,通过电阻R2和R1构成同相比例放大电路,放大后输出电压V2计算公式如下:

由运算放大器N2、基准源以及辅助电阻组成BUCK电源的反馈电压产生电路。运算放大器N1输出电压V2通过电阻R3进入运算放大器N2负输入端,同时,基准源V3输出电压V3通过电阻R7、电源芯片输出电压VOUT,通过电阻R4进入运算放大器N2正输入端。三路输入信号通过运算放大器构成加减运算电路,其中反馈电阻为R6。因此,运算放大器N2B输出电压VF可以通过下式计算得出:

选取R6=R7=R4=R3,则运算放大器N4B输出电压为:

对公式(3)进行变换,得出输出电压计算公式:

式中:V3为基准源电压,选取基准电压与BUCK芯片内部基准源电压大小相等的基准源,则有:

利用上述原理实现了音圈电机的线性负反馈驱动控制,并以此为基础设计最小系统,选用自带12位数模转换器的MCU输出控制信号,用0~4 095(0%~100%)作为输入控制量,负载选用音圈电机(8.2 Ω)进行驱动系统控制验证,得到的实验数据如表1所示。
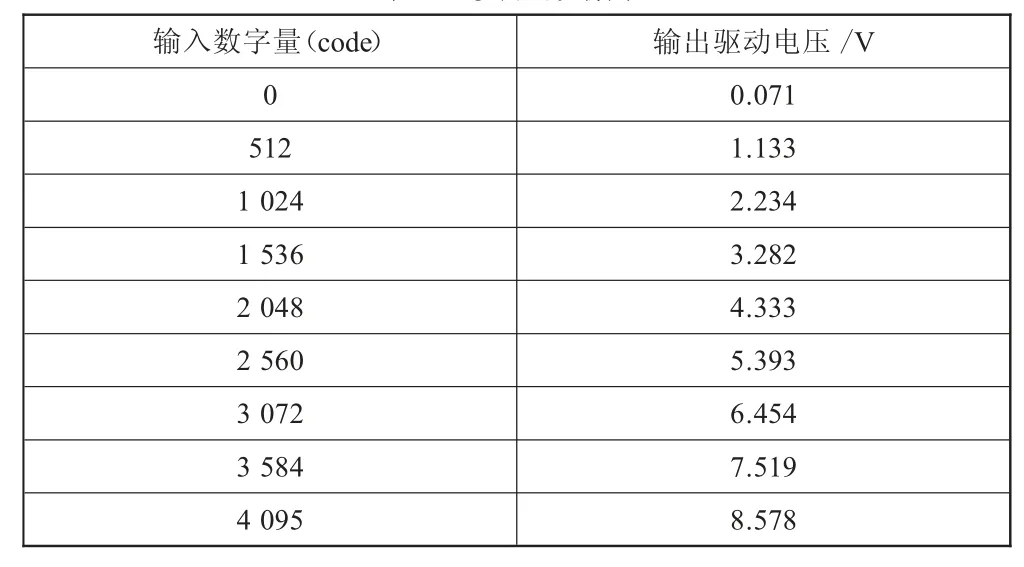
表1 实验数据表
通过仿真拟合出驱动电压与控制量关系,如图5所示。
从关系曲线可知,输出驱动电压基本和控制量呈线性关系,实现了系统对音圈电机的驱动控制。
4 结语
本文从工程需要出发,对音圈电机的驱动控制技术进行了原理分析,并提出了一种线性负反馈驱动控制方法,通过实验和仿真验证了其可靠性,为此类电机的控制策略设计提供了一种新的思路,同时也为后续的相关研究和实际应用打下了良好的基础。
